Occlusion-Free Image Based Visual Servoing using Probabilistic Control Barrier Certificates

0
🖼️
Sign in to get full access
Overview
- The paper proposes a Control Barrier Function (CBF) based controller to enable occlusion-free Image-Based Visual Servoing (IBVS) tasks for robots.
- IBVS is a widely-used approach in robotics that uses visual information to guide robots to desired positions, but occlusions can lead to visual servoing failure.
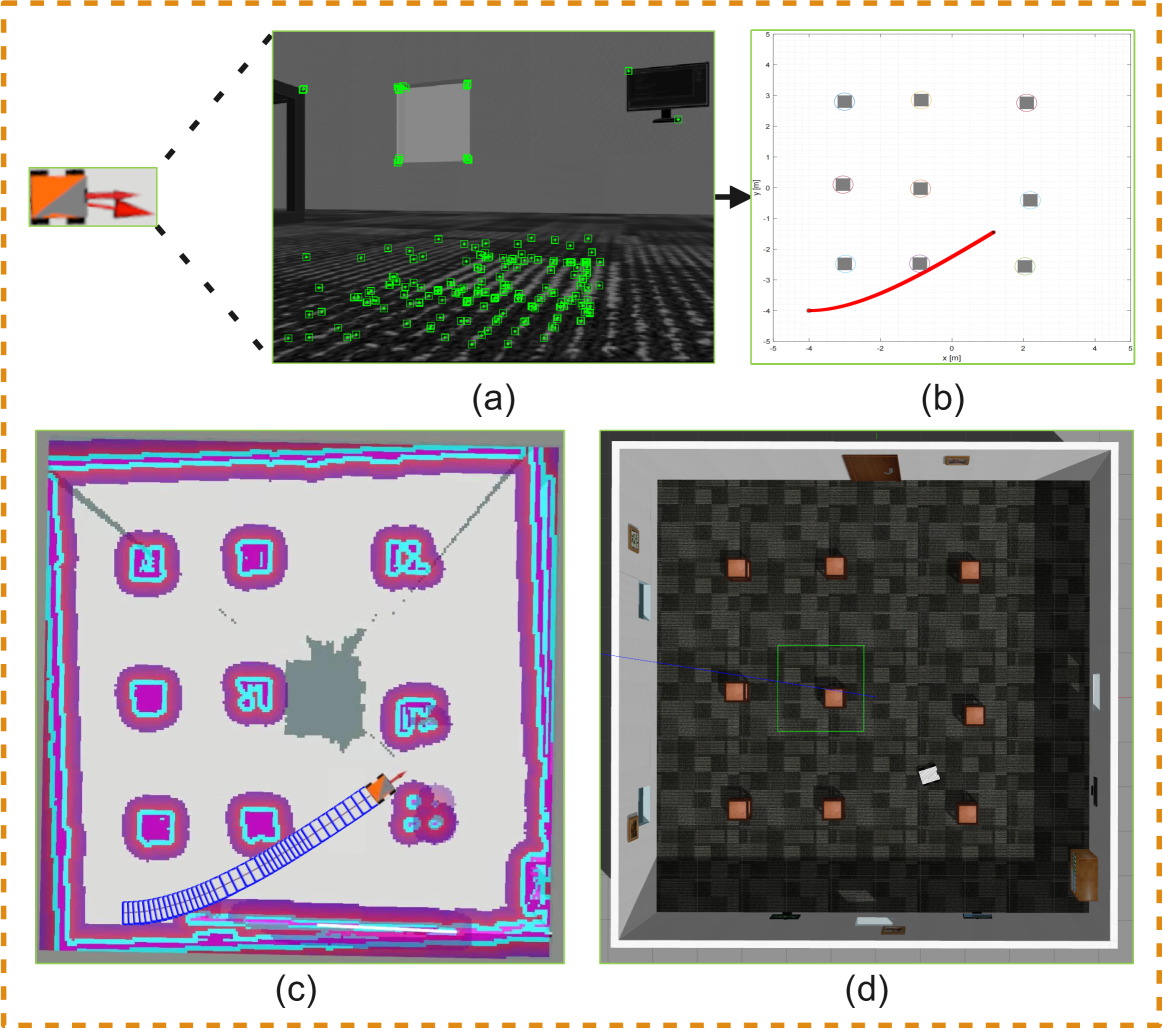
- The proposed method automatically adjusts the robot's configuration to keep the feature points in the field of view and away from obstacles, ensuring occlusion-free IBVS.
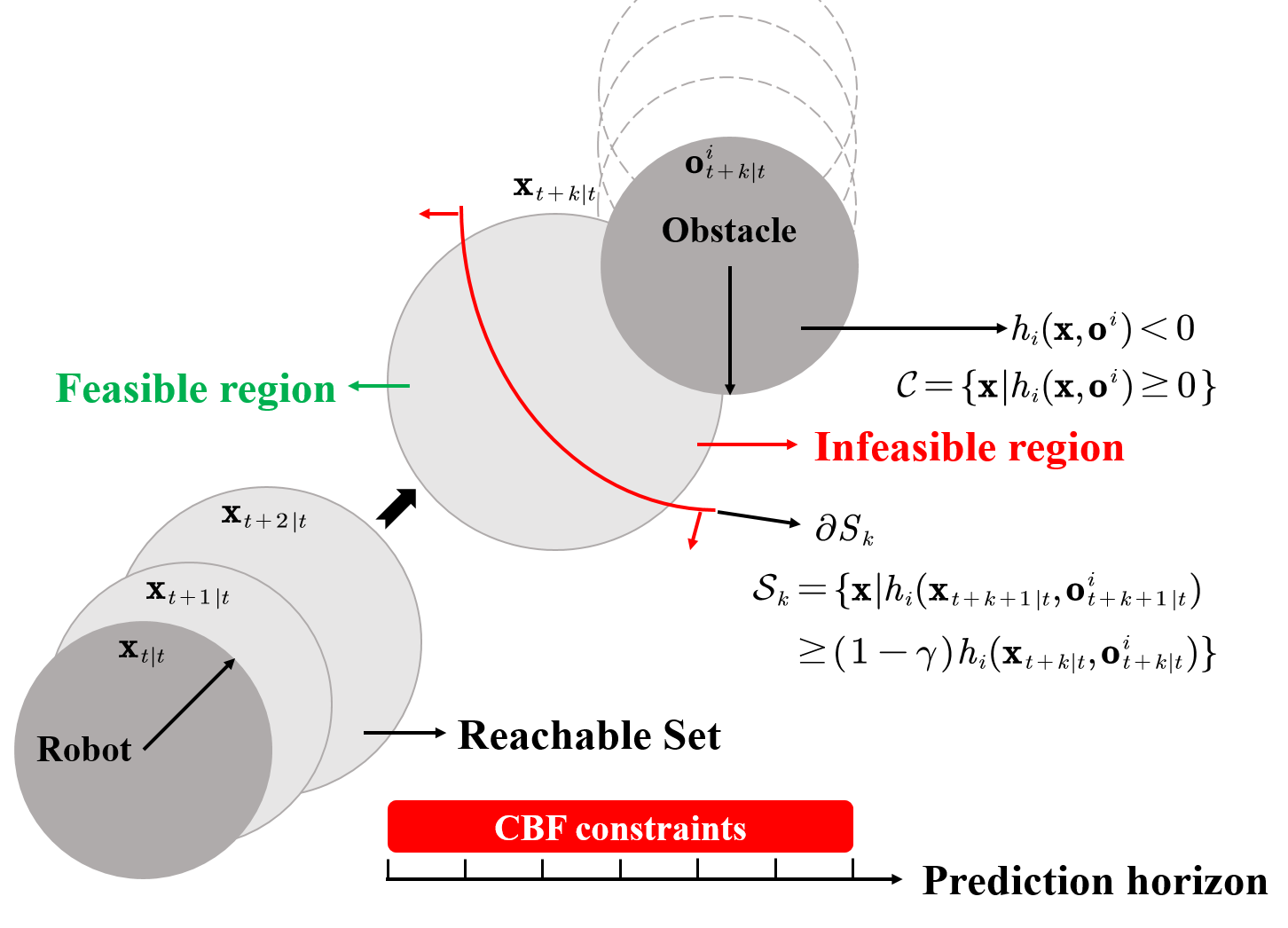
- The Probabilistic Control Barrier Certificates (PrCBC) are developed to encode chance-constrained occlusion avoidance constraints under uncertainty into the admissible control space for the robot.
- The proposed method is integrated with a Model Predictive Control (MPC) framework to optimize control inputs that achieve the primary IBVS task while enforcing occlusion avoidance.
Plain English Explanation
The paper addresses a common problem in robotics called Image-Based Visual Servoing (IBVS). IBVS is a technique that uses camera images to guide a robot to a desired position. However, one issue with IBVS is that if something blocks the camera's view, such as an obstacle, it can cause the robot to lose track of its target and fail to reach the desired position.
To solve this problem, the researchers developed a new control system that automatically adjusts the robot's movements to keep the camera's view clear. This system uses Control Barrier Functions (CBFs) to define a "safe" area around the robot where the camera can see clearly. The controller then tries to keep the robot within this safe area, even as it moves towards its target.
To account for the fact that the camera's measurements may not be perfect due to noise, the researchers also developed a "Probabilistic Control Barrier Certificate" (PrCBC). This allows the controller to ensure that the robot stays in the safe area with a high probability, even when the camera measurements are a bit uncertain.
The researchers then integrated this occlusion-avoiding control system with a Model Predictive Control (MPC) framework. This allows the robot to plan a sequence of movements that both reaches the desired target and keeps the camera's view clear of obstacles.
Overall, this new control system helps robots using IBVS to be more robust and reliable, even in environments with potential occlusions.
Technical Explanation
The paper proposes a Control Barrier Function (CBF) based controller that enables occlusion-free Image-Based Visual Servoing (IBVS) tasks for robots. IBVS is a widely-used approach in robotics that employs visual information to guide robots towards desired positions. However, occlusions in this approach can lead to visual servoing failure and degrade the control performance due to the obstructed vision feature points that are essential for providing visual feedback.
To address this issue, the researchers develop the Probabilistic Control Barrier Certificates (PrCBC) using control barrier functions. The PrCBC encode the chance-constrained occlusion avoidance constraints under uncertainty into deterministic admissible control space for the robot. This ensures that the feature points stay occlusion-free from obstacles with a satisfying predefined probability, even in the presence of measurement noise.
The proposed method is then integrated with a Model Predictive Control (MPC) framework, where the sequence of optimized control inputs can be derived to achieve the primary IBVS task while enforcing the occlusion avoidance during robot movements. Simulation results are provided to validate the performance of the proposed approach.
Critical Analysis
The paper presents a novel and promising approach to address the issue of occlusions in IBVS tasks. By incorporating the probabilistic control barrier certificates into an MPC framework, the method can effectively balance the primary IBVS objective with the need to maintain a clear line of sight to the visual features.
One potential limitation of the approach is that it relies on accurate knowledge of the robot's kinematic model and the obstacle locations in the environment. In real-world scenarios, these parameters may not be perfectly known, which could impact the method's performance. Additionally, the paper only provides simulation-based validation, and further experimental evaluation on physical robot platforms would be necessary to assess the practical feasibility and robustness of the approach.
Another area for further research could be exploring the integration of this occlusion-aware IBVS controller with other techniques, such as simultaneous localization and mapping (SLAM) or object tracking, to enhance the robot's situational awareness and adaptability in dynamic environments.
Conclusion
The proposed Control Barrier Function-based controller with Probabilistic Control Barrier Certificates represents a significant advancement in enabling occlusion-free Image-Based Visual Servoing for robots. By automatically adjusting the robot's configuration to maintain a clear line of sight to essential visual features, even in the presence of measurement noise and obstacles, this method can improve the reliability and robustness of IBVS-guided robot control. The integration with Model Predictive Control further enhances the practicality of the approach, making it a promising solution for real-world robotic applications where visual feedback is critical for task completion.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🖼️
0
Occlusion-Free Image Based Visual Servoing using Probabilistic Control Barrier Certificates
Yanze Zhang, Yupeng Yang, Wenhao Luo
Image-based visual servoing (IBVS) is a widely-used approach in robotics that employs visual information to guide robots towards desired positions. However, occlusions in this approach can lead to visual servoing failure and degrade the control performance due to the obstructed vision feature points that are essential for providing visual feedback. In this paper, we propose a Control Barrier Function (CBF) based controller that enables occlusion-free IBVS tasks by automatically adjusting the robot's configuration to keep the feature points in the field of view and away from obstacles. In particular, to account for measurement noise of the feature points, we develop the Probabilistic Control Barrier Certificates (PrCBC) using control barrier functions that encode the chance-constrained occlusion avoidance constraints under uncertainty into deterministic admissible control space for the robot, from which the resulting configuration of robot ensures that the feature points stay occlusion free from obstacles with a satisfying predefined probability. By integrating such constraints with a Model Predictive Control (MPC) framework, the sequence of optimized control inputs can be derived to achieve the primary IBVS task while enforcing the occlusion avoidance during robot movements. Simulation results are provided to validate the performance of our proposed method.
Read more7/9/2024

0
Adaptive Visual Servoing for On-Orbit Servicing
Farhad Aghili
This paper presents an adaptive visual servoing framework for robotic on-orbit servicing (OOS), specifically designed for capturing tumbling satellites. The vision-guided robotic system is capable of selecting optimal control actions in the event of partial or complete vision system failure, particularly in the short term. The autonomous system accounts for physical and operational constraints, executing visual servoing tasks to minimize a cost function. A hierarchical control architecture is developed, integrating a variant of the Iterative Closest Point (ICP) algorithm for image registration, a constrained noise-adaptive Kalman filter, fault detection and recovery logic, and a constrained optimal path planner. The dynamic estimator provides real-time estimates of unknown states and uncertain parameters essential for motion prediction, while ensuring consistency through a set of inequality constraints. It also adjusts the Kalman filter parameters adaptively in response to unexpected vision errors. In the event of vision system faults, a recovery strategy is activated, guided by fault detection logic that monitors the visual feedback via the metric fit error of image registration. The estimated/predicted pose and parameters are subsequently fed into an optimal path planner, which directs the robot's end-effector to the target's grasping point. This process is subject to multiple constraints, including acceleration limits, smooth capture, and line-of-sight maintenance with the target. Experimental results demonstrate that the proposed visual servoing system successfully captured a free-floating object, despite complete occlusion of the vision system.
Read more9/10/2024
0
Enhanced Visual SLAM for Collision-free Driving with Lightweight Autonomous Cars
Zhihao Lin, Zhen Tian, Qi Zhang, Hanyang Zhuang, Jianglin Lan
The paper presents a vision-based obstacle avoidance strategy for lightweight self-driving cars that can be run on a CPU-only device using a single RGB-D camera. The method consists of two steps: visual perception and path planning. The visual perception part uses ORBSLAM3 enhanced with optical flow to estimate the car's poses and extract rich texture information from the scene. In the path planning phase, we employ a method combining a control Lyapunov function and control barrier function in the form of quadratic program (CLF-CBF-QP) together with an obstacle shape reconstruction process (SRP) to plan safe and stable trajectories. To validate the performance and robustness of the proposed method, simulation experiments were conducted with a car in various complex indoor environments using the Gazebo simulation environment. Our method can effectively avoid obstacles in the scenes. The proposed algorithm outperforms benchmark algorithms in achieving more stable and shorter trajectories across multiple simulated scenes.
Read more8/22/2024
0
Robot Safe Planning In Dynamic Environments Based On Model Predictive Control Using Control Barrier Function
Zetao Lu, Kaijun Feng, Jun Xu, Haoyao Chen, Yunjiang Lou
Implementing obstacle avoidance in dynamic environments is a challenging problem for robots. Model predictive control (MPC) is a popular strategy for dealing with this type of problem, and recent work mainly uses control barrier function (CBF) as hard constraints to ensure that the system state remains in the safe set. However, in crowded scenarios, effective solutions may not be obtained due to infeasibility problems, resulting in degraded controller performance. We propose a new MPC framework that integrates CBF to tackle the issue of obstacle avoidance in dynamic environments, in which the infeasibility problem induced by hard constraints operating over the whole prediction horizon is solved by softening the constraints and introducing exact penalty, prompting the robot to actively seek out new paths. At the same time, generalized CBF is extended as a single-step safety constraint of the controller to enhance the safety of the robot during navigation. The efficacy of the proposed method is first shown through simulation experiments, in which a double-integrator system and a unicycle system are employed, and the proposed method outperforms other controllers in terms of safety, feasibility, and navigation efficiency. Furthermore, real-world experiment on an MR1000 robot is implemented to demonstrate the effectiveness of the proposed method.
Read more4/10/2024