Online Calibration of a Single-Track Ground Vehicle Dynamics Model by Tight Fusion with Visual-Inertial Odometry

0
📈
Sign in to get full access
Overview
- Wheeled mobile robots need the ability to estimate their motion and the effect of their control actions for navigation planning.
- The paper presents ST-VIO, a novel approach that tightly fuses a single-track dynamics model for wheeled ground vehicles with visual inertial odometry (VIO).
- The method calibrates and adapts the dynamics model online to improve the accuracy of forward prediction conditioned on future control inputs.
Plain English Explanation
Wheeled robots, like self-driving cars or warehouse robots, need to be able to estimate how they are moving and how their actions (like steering or accelerating) will affect that movement. This is important for planning how the robot should navigate its environment.
The researchers in this paper developed a new approach called ST-VIO that combines two key components: a model of how wheeled vehicles move, and a technique called visual inertial odometry (VIO) that uses cameras and motion sensors to track the robot's movement.
The single-track dynamics model approximates how a wheeled vehicle will move on flat ground based on the inputs the robot gives (like steering and throttle). ST-VIO calibrates and adjusts this model on-the-fly to make its predictions more accurate, especially when the robot encounters new situations like different terrain or wheels.
By tightly integrating the dynamics model with the VIO tracking, ST-VIO can not only make better predictions about future motion, but it can also use those predictions to improve the accuracy of the VIO tracking. This helps the robot navigate more precisely, even in challenging environments.
Technical Explanation
The key innovation in ST-VIO is the tight integration of a single-track dynamics model for wheeled vehicles with visual inertial odometry (VIO). The single-track model approximates the motion of a wheeled vehicle on flat ground using ordinary differential equations that describe the vehicle's kinematics and dynamics under specific control inputs.
ST-VIO uses a differentiable formulation of the single-track model to seamlessly incorporate it as a dynamics factor within the VIO framework. This allows the model parameters to be optimized online alongside the VIO state variables, enabling the system to calibrate and adapt the dynamics model in real-time.
By fusing the predictive capabilities of the dynamics model with the tracking of the VIO system, ST-VIO can make more accurate predictions about the robot's future motion, conditioned on planned control inputs. The researchers demonstrate through experiments in both indoor and outdoor environments that this approach can improve trajectory tracking accuracy, even when the robot encounters changes in the terrain or wheels.
Critical Analysis
The paper provides a thorough evaluation of the ST-VIO approach, validating its performance in a variety of real-world scenarios. However, the authors acknowledge that the method assumes flat ground and does not explicitly consider the effects of uneven terrain or obstacles. Extending the dynamics model to handle more complex environments could be an area for future research.
Additionally, while the online calibration of the dynamics model is a key strength of ST-VIO, the paper does not explore how the model parameters evolve over time or provide insight into the underlying reasons for changes (e.g., wheel wear, surface changes). Providing more transparency into the model adaptation process could help users better understand the system's behavior.
Overall, ST-VIO represents an important step forward in tightly coupling dynamics models with visual-inertial odometry for improved robot navigation. Further research into more versatile sensor fusion approaches and model adaptation strategies could help unlock the full potential of this technique.
Conclusion
The ST-VIO approach presented in this paper demonstrates the value of integrating a dynamics model for wheeled vehicles with visual inertial odometry. By calibrating and adapting the model parameters online, ST-VIO can make more accurate predictions about future motion, which in turn improves the overall tracking accuracy of the robot's trajectory.
This technique has significant implications for the development of reliable and adaptable navigation systems for wheeled mobile robots, such as self-driving cars, autonomous warehouse vehicles, and mobile robots operating in complex environments. By leveraging both kinematic modeling and sensory feedback, ST-VIO represents an important step towards more robust and responsive robot navigation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
0
Online Calibration of a Single-Track Ground Vehicle Dynamics Model by Tight Fusion with Visual-Inertial Odometry
Haolong Li, Joerg Stueckler
Wheeled mobile robots need the ability to estimate their motion and the effect of their control actions for navigation planning. In this paper, we present ST-VIO, a novel approach which tightly fuses a single-track dynamics model for wheeled ground vehicles with visual inertial odometry (VIO). Our method calibrates and adapts the dynamics model online to improve the accuracy of forward prediction conditioned on future control inputs. The single-track dynamics model approximates wheeled vehicle motion under specific control inputs on flat ground using ordinary differential equations. We use a singularity-free and differentiable variant of the single-track model to enable seamless integration as dynamics factor into VIO and to optimize the model parameters online together with the VIO state variables. We validate our method with real-world data in both indoor and outdoor environments with different terrain types and wheels. In experiments, we demonstrate that ST-VIO can not only adapt to wheel or ground changes and improve the accuracy of prediction under new control inputs, but can even improve tracking accuracy.
Read more5/29/2024

0
Adaptive VIO: Deep Visual-Inertial Odometry with Online Continual Learning
Youqi Pan, Wugen Zhou, Yingdian Cao, Hongbin Zha
Visual-inertial odometry (VIO) has demonstrated remarkable success due to its low-cost and complementary sensors. However, existing VIO methods lack the generalization ability to adjust to different environments and sensor attributes. In this paper, we propose Adaptive VIO, a new monocular visual-inertial odometry that combines online continual learning with traditional nonlinear optimization. Adaptive VIO comprises two networks to predict visual correspondence and IMU bias. Unlike end-to-end approaches that use networks to fuse the features from two modalities (camera and IMU) and predict poses directly, we combine neural networks with visual-inertial bundle adjustment in our VIO system. The optimized estimates will be fed back to the visual and IMU bias networks, refining the networks in a self-supervised manner. Such a learning-optimization-combined framework and feedback mechanism enable the system to perform online continual learning. Experiments demonstrate that our Adaptive VIO manifests adaptive capability on EuRoC and TUM-VI datasets. The overall performance exceeds the currently known learning-based VIO methods and is comparable to the state-of-the-art optimization-based methods.
Read more5/28/2024
0
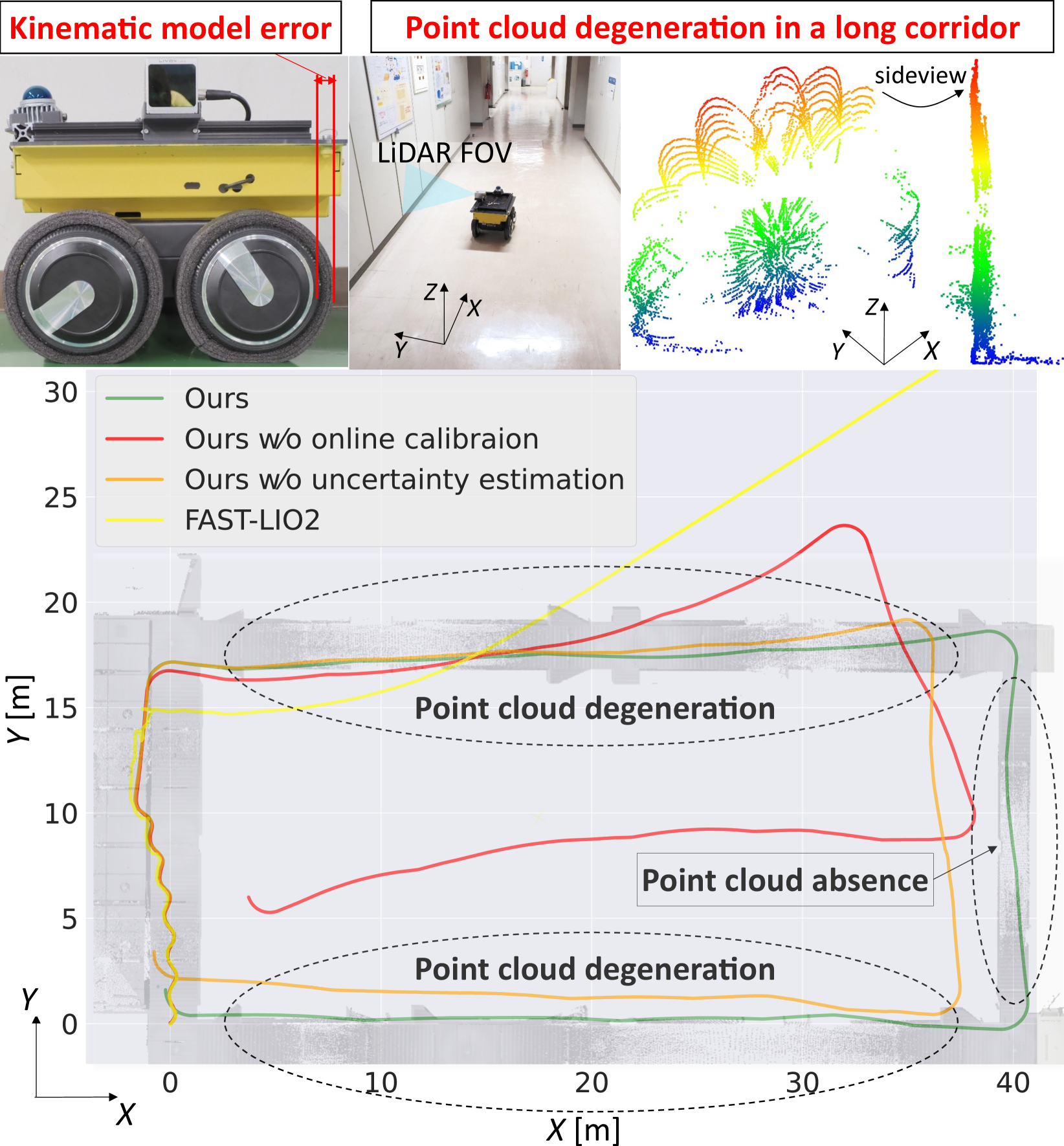
Tightly-Coupled LiDAR-IMU-Wheel Odometry with Online Calibration of a Kinematic Model for Skid-Steering Robots
Taku Okawara, Kenji Koide, Shuji Oishi, Masashi Yokozuka, Atsuhiko Banno, Kentaro Uno, Kazuya Yoshida
Tunnels and long corridors are challenging environments for mobile robots because a LiDAR point cloud should degenerate in these environments. To tackle point cloud degeneration, this study presents a tightly-coupled LiDAR-IMU-wheel odometry algorithm with an online calibration for skid-steering robots. We propose a full linear wheel odometry factor, which not only serves as a motion constraint but also performs the online calibration of kinematic models for skid-steering robots. Despite the dynamically changing kinematic model (e.g., wheel radii changes caused by tire pressures) and terrain conditions, our method can address the model error via online calibration. Moreover, our method enables an accurate localization in cases of degenerated environments, such as long and straight corridors, by calibration while the LiDAR-IMU fusion sufficiently operates. Furthermore, we estimate the uncertainty (i.e., covariance matrix) of the wheel odometry online for creating a reasonable constraint. The proposed method is validated through three experiments. The first indoor experiment shows that the proposed method is robust in severe degeneracy cases (long corridors) and changes in the wheel radii. The second outdoor experiment demonstrates that our method accurately estimates the sensor trajectory despite being in rough outdoor terrain owing to online uncertainty estimation of wheel odometry. The third experiment shows the proposed online calibration enables robust odometry estimation in changing terrains.
Read more9/14/2024
🤖
0
VIO-DualProNet: Visual-Inertial Odometry with Learning Based Process Noise Covariance
Dan Solodar, Itzik Klein
Visual-inertial odometry (VIO) is a vital technique used in robotics, augmented reality, and autonomous vehicles. It combines visual and inertial measurements to accurately estimate position and orientation. Existing VIO methods assume a fixed noise covariance for the inertial uncertainty. However, accurately determining in real-time the noise variance of the inertial sensors presents a significant challenge as the uncertainty changes throughout the operation leading to suboptimal performance and reduced accuracy. To circumvent this, we propose VIO-DualProNet, a novel approach that utilizes deep learning methods to dynamically estimate the inertial noise uncertainty in real-time. By designing and training a deep neural network to predict inertial noise uncertainty using only inertial sensor measurements, and integrating it into the VINS-Mono algorithm, we demonstrate a substantial improvement in accuracy and robustness, enhancing VIO performance and potentially benefiting other VIO-based systems for precise localization and mapping across diverse conditions.
Read more4/30/2024