Online Context Learning for Socially-compliant Navigation

0
Sign in to get full access
Overview
• This paper presents an approach for online context learning to enable socially-compliant navigation for robots in dynamic environments.
• The proposed method allows robots to learn and adapt their navigation policies based on the observed social context, enabling more natural and coherent interactions with humans.
• The research explores techniques for identifying and incorporating relevant social cues, such as human body language and spatial awareness, to guide the robot's navigation decisions.
Plain English Explanation
The paper introduces a new way for robots to navigate around people in a more natural and socially-appropriate manner. Typically, robots have difficulty understanding the unwritten social rules and norms that humans use to coordinate their movements in shared spaces.
This research aims to address this challenge by enabling robots to learn and adapt their navigation behaviors based on observing the social context around them. The key idea is that by picking up on subtle social cues, like body language and spatial awareness, the robot can adjust its path and actions to better align with human social norms.
For example, if the robot notices that a person is focused on a conversation and unlikely to move out of the way, it can choose to take a different route to avoid disrupting them. Or if the robot senses that a group of people are congregating in a certain area, it can navigate around the periphery to avoid cutting through the middle of the group.
By dynamically learning and applying these types of socially-aware behaviors, the researchers believe robots can navigate in a more seamless and comfortable way alongside humans, ultimately improving the overall human-robot interaction experience.
Technical Explanation
The core technical approach involves developing an online context learning framework that allows the robot to continuously observe and model the social dynamics of its environment. This involves using sensors and computer vision techniques to detect relevant social cues, such as human body poses, group formations, and gaze directions.
The robot then uses this observed social context information to update a neural network-based policy that governs its navigation decisions. By training this policy model in an online, incremental fashion, the robot can adapt its behaviors to match the specific social norms and expectations of the current environment.
The researchers evaluate their approach through both simulation experiments and real-world user studies, demonstrating that the socially-aware navigation policies lead to more natural, comfortable, and efficient robot movement compared to traditional navigation methods that do not consider social context.
Critical Analysis
The paper presents a compelling technical approach for enabling socially-compliant robot navigation, which is an important challenge for advancing human-robot interaction. The online learning aspect is particularly novel, as it allows the robot to continuously refine its behaviors based on the evolving social dynamics of the environment.
However, the authors acknowledge some limitations to their current work. For example, the social context modeling is primarily based on low-level cues like body poses, and does not yet incorporate higher-level understanding of social relationships, roles, and conversational states. Expanding the social context representation could further improve the robot's ability to navigate in a socially-appropriate manner.
Additionally, the real-world user studies, while promising, were conducted in relatively constrained environments. Evaluating the approach in more complex, crowded, and unpredictable public settings would be an important next step to assess its robustness and scalability.
Overall, this research represents an important step forward in enabling robots to navigate in a more natural and socially-aware way. The techniques and insights presented could have broad applicability for a wide range of human-robot interaction scenarios, from service robots in public spaces to assistive robots in homes and healthcare settings.
Conclusion
This paper introduces an online context learning framework to enable socially-compliant navigation for robots operating in dynamic environments with humans. By continuously observing and modeling relevant social cues, the robot can adapt its navigation policies to better align with human social norms and expectations.
The technical approach and experimental results demonstrate the potential for this type of socially-aware navigation to improve the overall human-robot interaction experience. As robots become more prevalent in our everyday lives, developing navigation capabilities that are sensitive to social context will be crucial for ensuring smooth and natural integration.
While the current work has some limitations, the insights and techniques presented in this paper represent an important step forward in this rapidly evolving field. Continued research and development in this area could pave the way for a new generation of robots that can seamlessly and politely navigate alongside humans in a wide range of real-world settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Online Context Learning for Socially-compliant Navigation
Iaroslav Okunevich, Alexandre Lombard, Tomas Krajnik, Yassine Ruichek, Zhi Yan
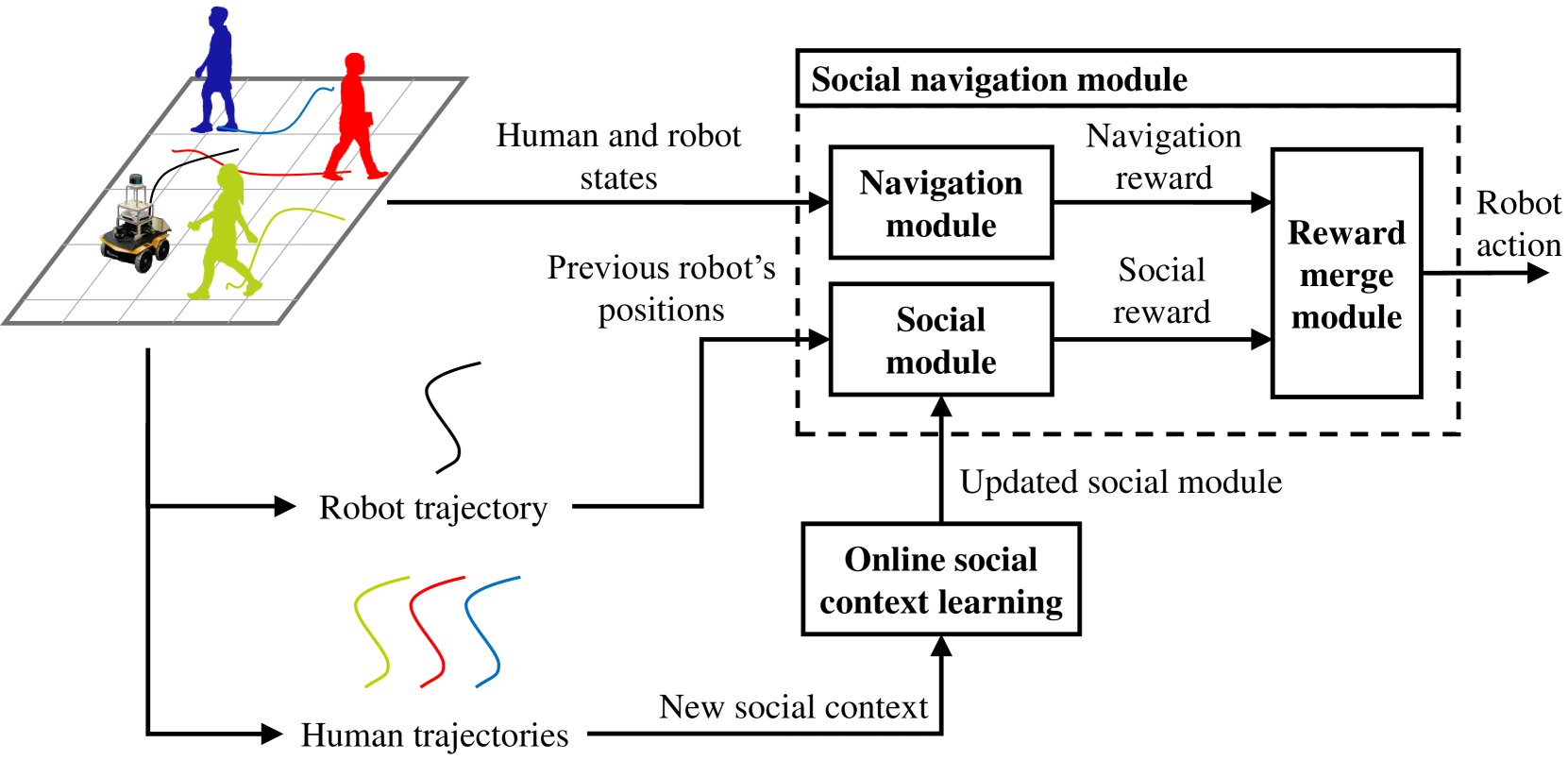
Robot social navigation needs to adapt to different human factors and environmental contexts. However, since these factors and contexts are difficult to predict and cannot be exhaustively enumerated, traditional learning-based methods have difficulty in ensuring the social attributes of robots in long-term and cross-environment deployments. This letter introduces an online context learning method that aims to empower robots to adapt to new social environments online. The proposed method adopts a two-layer structure. The bottom layer is built using a deep reinforcement learning-based method to ensure the output of basic robot navigation commands. The upper layer is implemented using an online robot learning-based method to socialize the control commands suggested by the bottom layer. Experiments using a community-wide simulator show that our method outperforms the state-of-the-art ones. Experimental results in the most challenging scenarios show that our method improves the performance of the state-of-the-art by 8%. The source code of the proposed method, the data used, and the tools for the per-training step will be publicly available at https://github.com/Nedzhaken/SOCSARL-OL.
Read more6/18/2024
👀
0
OLiVia-Nav: An Online Lifelong Vision Language Approach for Mobile Robot Social Navigation
Siddarth Narasimhan, Aaron Hao Tan, Daniel Choi, Goldie Nejat
Service robots in human-centered environments such as hospitals, office buildings, and long-term care homes need to navigate while adhering to social norms to ensure the safety and comfortability of the people they are sharing the space with. Furthermore, they need to adapt to new social scenarios that can arise during robot navigation. In this paper, we present a novel Online Lifelong Vision Language architecture, OLiVia-Nav, which uniquely integrates vision-language models (VLMs) with an online lifelong learning framework for robot social navigation. We introduce a unique distillation approach, Social Context Contrastive Language Image Pre-training (SC-CLIP), to transfer the social reasoning capabilities of large VLMs to a lightweight VLM, in order for OLiVia-Nav to directly encode social and environment context during robot navigation. These encoded embeddings are used to generate and select robot social compliant trajectories. The lifelong learning capabilities of SC-CLIP enable OLiVia-Nav to update the lightweight VLM with robot trajectory predictions overtime as new social scenarios are encountered. We conducted extensive real-world experiments in diverse social navigation scenarios. The results showed that OLiVia-Nav outperformed existing state-of-the-art DRL and VLM methods in terms of mean squared error, Hausdorff loss, and personal space violation duration. Ablation studies also verified the design choices for OLiVia-Nav.
Read more9/23/2024
0
Learning Early Social Maneuvers for Enhanced Social Navigation
Yigit Yildirim, Mehmet Suzer, Emre Ugur
Socially compliant navigation is an integral part of safety features in Human-Robot Interaction. Traditional approaches to mobile navigation prioritize physical aspects, such as efficiency, but social behaviors gain traction as robots appear more in daily life. Recent techniques to improve the social compliance of navigation often rely on predefined features or reward functions, introducing assumptions about social human behavior. To address this limitation, we propose a novel Learning from Demonstration (LfD) framework for social navigation that exclusively utilizes raw sensory data. Additionally, the proposed system contains mechanisms to consider the future paths of the surrounding pedestrians, acknowledging the temporal aspect of the problem. The final product is expected to reduce the anxiety of people sharing their environment with a mobile robot, helping them trust that the robot is aware of their presence and will not harm them. As the framework is currently being developed, we outline its components, present experimental results, and discuss future work towards realizing this framework.
Read more5/3/2024
0
Socially Integrated Navigation: A Social Acting Robot with Deep Reinforcement Learning
Daniel Flogel, Lars Fischer, Thomas Rudolf, Tobias Schurmann, Soren Hohmann
Mobile robots are being used on a large scale in various crowded situations and become part of our society. The socially acceptable navigation behavior of a mobile robot with individual human consideration is an essential requirement for scalable applications and human acceptance. Deep Reinforcement Learning (DRL) approaches are recently used to learn a robot's navigation policy and to model the complex interactions between robots and humans. We propose to divide existing DRL-based navigation approaches based on the robot's exhibited social behavior and distinguish between social collision avoidance with a lack of social behavior and socially aware approaches with explicit predefined social behavior. In addition, we propose a novel socially integrated navigation approach where the robot's social behavior is adaptive and emerges from the interaction with humans. The formulation of our approach is derived from a sociological definition, which states that social acting is oriented toward the acting of others. The DRL policy is trained in an environment where other agents interact socially integrated and reward the robot's behavior individually. The simulation results indicate that the proposed socially integrated navigation approach outperforms a socially aware approach in terms of ego navigation performance while significantly reducing the negative impact on all agents within the environment.
Read more7/29/2024