Open-Set Semantic Uncertainty Aware Metric-Semantic Graph Matching

0

Sign in to get full access
Overview
- This paper presents a novel approach for open-set semantic uncertainty-aware metric-semantic graph matching.
- The method aims to handle unknown objects and uncertainties in semantic information during graph matching.
- It uses a multi-modal graph representation and a hierarchical matching algorithm to improve matching performance.
Plain English Explanation
The paper describes a new technique for matching graphs that represent objects and their relationships. Graphs are a way to model complex data with nodes (representing objects) and edges (representing connections between objects).
The key challenge the researchers address is dealing with "open-set" scenarios, where the system may encounter objects it hasn't seen before during the matching process. Traditional graph matching approaches struggle with this, as they rely heavily on predefined semantic information about the objects.
To overcome this, the proposed method uses a multi-modal graph representation, which combines both metric information (like the physical shape and size of objects) and semantic information (like the type or category of objects). This allows the system to reason about unknown objects using the available metric data, even if the semantic information is incomplete or uncertain.
The researchers also develop a hierarchical matching algorithm that iterates through the graph representation, gradually refining the matches by considering both the metric and semantic aspects. This helps the system gradually resolve uncertainties and find the best overall match, even in the presence of unknown objects.
Technical Explanation
The paper proposes an Open-Set Semantic Uncertainty Aware Metric-Semantic Graph Matching (OS-UAMSG) approach, which aims to address the limitations of existing graph matching techniques in handling unknown objects and uncertainties in semantic information.
The key components of the method are:
-
Multi-modal Graph Representation: The objects and their relationships are represented using a graph structure that combines both metric information (e.g., shape, size) and semantic information (e.g., object categories, attributes). This allows the system to reason about unknown objects using the available metric data, even if the semantic information is incomplete or uncertain.
-
Hierarchical Matching Algorithm: The matching process is performed in a hierarchical manner, starting with an initial coarse alignment based on the metric information, followed by iterative refinement steps that gradually incorporate the semantic information. This helps the system resolve uncertainties and find the optimal match, even in the presence of unknown objects.
The researchers evaluate their approach on both synthetic and real-world datasets, demonstrating improved matching performance compared to state-of-the-art methods, especially in open-set scenarios where unknown objects are present.
Critical Analysis
The paper presents a well-designed and comprehensive approach to address the challenge of graph matching in the presence of unknown objects and semantic uncertainties. The use of a multi-modal graph representation and the hierarchical matching algorithm are effective strategies to handle these issues.
One potential limitation of the approach is that it may be computationally expensive, especially for large and complex graphs, due to the iterative nature of the matching process. The researchers acknowledge this and suggest potential avenues for improving the efficiency of the algorithm, such as employing parallelization or approximate matching techniques.
Furthermore, the paper does not discuss the robustness of the method to noisy or imperfect input data, which is a common challenge in real-world scenarios. Exploring the performance of the OS-UAMSG approach under varying levels of input noise or uncertainty could provide valuable insights for its practical application.
Conclusion
The Open-Set Semantic Uncertainty Aware Metric-Semantic Graph Matching (OS-UAMSG) method proposed in this paper represents a significant advancement in the field of graph matching. By combining metric and semantic information, and employing a hierarchical matching algorithm, the approach can effectively handle unknown objects and uncertainties, which are common challenges in many real-world applications.
The demonstrated improvements in matching performance, especially in open-set scenarios, suggest that the OS-UAMSG method could have a meaningful impact on tasks like scene understanding, object recognition, and knowledge representation. Further research on the computational efficiency and robustness of the approach could help pave the way for its widespread adoption in various domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Open-Set Semantic Uncertainty Aware Metric-Semantic Graph Matching
Kurran Singh, John J. Leonard
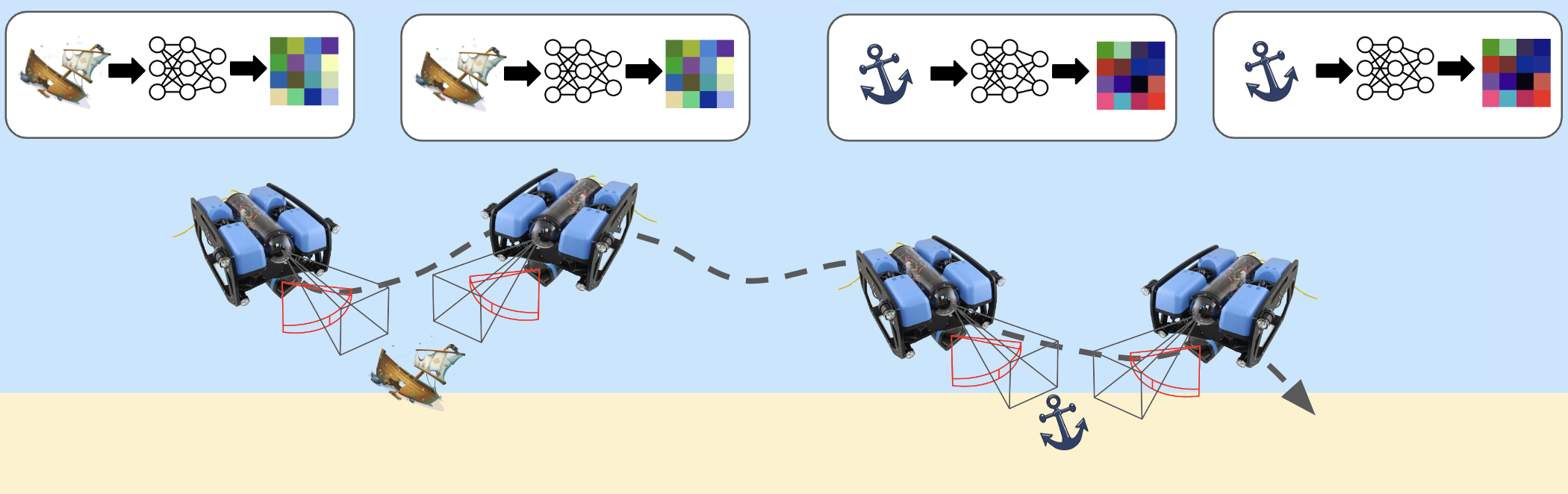
Underwater object-level mapping requires incorporating visual foundation models to handle the uncommon and often previously unseen object classes encountered in marine scenarios. In this work, a metric of semantic uncertainty for open-set object detections produced by visual foundation models is calculated and then incorporated into an object-level uncertainty tracking framework. Object-level uncertainties and geometric relationships between objects are used to enable robust object-level loop closure detection for unknown object classes. The above loop closure detection problem is formulated as a graph-matching problem. While graph matching, in general, is NP-Complete, a solver for an equivalent formulation of the proposed graph matching problem as a graph editing problem is tested on multiple challenging underwater scenes. Results for this solver as well as three other solvers demonstrate that the proposed methods are feasible for real-time use in marine environments for the robust, open-set, multi-object, semantic-uncertainty-aware loop closure detection. Further experimental results on the KITTI dataset demonstrate that the method generalizes to large-scale terrestrial scenes.
Read more9/19/2024
0
New!Opti-Acoustic Semantic SLAM with Unknown Objects in Underwater Environments
Kurran Singh, Jungseok Hong, Nicholas R. Rypkema, John J. Leonard
Despite recent advances in semantic Simultaneous Localization and Mapping (SLAM) for terrestrial and aerial applications, underwater semantic SLAM remains an open and largely unaddressed research problem due to the unique sensing modalities and the object classes found underwater. This paper presents an object-based semantic SLAM method for underwater environments that can identify, localize, classify, and map a wide variety of marine objects without a priori knowledge of the object classes present in the scene. The method performs unsupervised object segmentation and object-level feature aggregation, and then uses opti-acoustic sensor fusion for object localization. Probabilistic data association is used to determine observation to landmark correspondences. Given such correspondences, the method then jointly optimizes landmark and vehicle position estimates. Indoor and outdoor underwater datasets with a wide variety of objects and challenging acoustic and lighting conditions are collected for evaluation and made publicly available. Quantitative and qualitative results show the proposed method achieves reduced trajectory error compared to baseline methods, and is able to obtain comparable map accuracy to a baseline closed-set method that requires hand-labeled data of all objects in the scene.
Read more9/19/2024

0
LOSS-SLAM: Lightweight Open-Set Semantic Simultaneous Localization and Mapping
Kurran Singh, Tim Magoun, John J. Leonard
Enabling robots to understand the world in terms of objects is a critical building block towards higher level autonomy. The success of foundation models in vision has created the ability to segment and identify nearly all objects in the world. However, utilizing such objects to localize the robot and build an open-set semantic map of the world remains an open research question. In this work, a system of identifying, localizing, and encoding objects is tightly coupled with probabilistic graphical models for performing open-set semantic simultaneous localization and mapping (SLAM). Results are presented demonstrating that the proposed lightweight object encoding can be used to perform more accurate object-based SLAM than existing open-set methods, closed-set methods, and geometric methods while incurring a lower computational overhead than existing open-set mapping methods.
Read more4/9/2024
0
Mesh-based Photorealistic and Real-time 3D Mapping for Robust Visual Perception of Autonomous Underwater Vehicle
Jungwoo Lee, Younggun Cho
This paper proposes a photorealistic real-time dense 3D mapping system that utilizes a learning-based image enhancement method and mesh-based map representation. Due to the characteristics of the underwater environment, where problems such as hazing and low contrast occur, it is hard to apply conventional simultaneous localization and mapping (SLAM) methods. Furthermore, for sensitive tasks like inspecting cracks, photorealistic mapping is very important. However, the behavior of Autonomous Underwater Vehicle (AUV) is computationally constrained. In this paper, we utilize a neural network-based image enhancement method to improve pose estimation and mapping quality and apply a sliding window-based mesh expansion method to enable lightweight, fast, and photorealistic mapping. To validate our results, we utilize real-world and indoor synthetic datasets. We performed qualitative validation with the real-world dataset and quantitative validation by modeling images from the indoor synthetic dataset as underwater scenes.
Read more4/30/2024