OpenMaterial: A Comprehensive Dataset of Complex Materials for 3D Reconstruction

0
Sign in to get full access
Overview
- This paper introduces a new dataset called OpenMaterial, which contains a comprehensive collection of complex materials for 3D reconstruction.
- The dataset includes a wide range of materials with diverse properties, such as metals, fabrics, and ceramics, captured under various lighting conditions.
- The authors aim to enable researchers and developers to train more robust and accurate 3D reconstruction models that can handle the complexity of real-world materials.
Plain English Explanation
The paper presents a new dataset called OpenMaterial that contains a large and diverse collection of materials, such as metals, fabrics, and ceramics, that have been photographed under different lighting conditions. This dataset is designed to help researchers and developers create more advanced 3D reconstruction models that can accurately handle the complex appearance of real-world materials.
Traditionally, 3D reconstruction models have struggled to accurately reproduce the intricate details and properties of complex materials, which can vary greatly in their appearance depending on factors like lighting, texture, and reflectivity. By providing a comprehensive dataset that covers a wide range of material types and lighting scenarios, the authors hope to enable the development of more robust and reliable 3D reconstruction algorithms that can be applied to a broader range of real-world applications, such as virtual reality, augmented reality, and object-level neural radiance fields.
Technical Explanation
The OpenMaterial dataset is designed to address the limitations of existing material datasets, which often focus on a narrow range of materials or lack the diversity and complexity of real-world materials. The dataset contains over 10,000 high-quality images of 150 different materials captured under a variety of lighting conditions, including direct, indirect, and mixed lighting.
To create the dataset, the authors used a custom-built turntable setup with carefully controlled lighting to capture multiple views of each material sample. The materials were selected to represent a wide range of properties, such as reflectivity, roughness, and anisotropy, and were chosen to be representative of common real-world materials found in large-scale multimodal models and multimodal learning tasks.
The dataset is accompanied by detailed metadata, including material properties, lighting information, and camera parameters, to enable researchers to develop and evaluate advanced 3D reconstruction algorithms. The authors have also provided baseline results using state-of-the-art 3D reconstruction methods to serve as a benchmark for future research.
Critical Analysis
The OpenMaterial dataset represents a significant advancement in the field of 3D reconstruction, as it provides researchers with a comprehensive and diverse set of materials to work with. The authors have made a concerted effort to capture the complexity of real-world materials, which is a crucial step towards developing more robust and accurate 3D reconstruction models.
However, the dataset is not without its limitations. The authors acknowledge that the dataset may not cover the full spectrum of materials found in the real world, and there may be challenges in capturing the subtle nuances of certain materials or lighting conditions. Additionally, the dataset is primarily focused on static material samples, and it may not fully capture the dynamic and interactive nature of real-world materials.
Further research could explore ways to expand the dataset, such as incorporating more diverse material samples, dynamic lighting conditions, or even incorporating multimodal data sources like point clouds or neural radiance fields. Additionally, the evaluation of 3D reconstruction algorithms on the OpenMaterial dataset could provide valuable insights into the strengths and weaknesses of current approaches, and help guide the development of more advanced techniques.
Conclusion
The OpenMaterial dataset represents a significant contribution to the field of 3D reconstruction, providing researchers and developers with a comprehensive and diverse collection of complex materials to work with. By enabling the development of more robust and accurate 3D reconstruction models, the dataset has the potential to unlock new applications and use cases in areas like virtual reality, augmented reality, and object-level neural radiance fields. While the dataset has some limitations, it serves as an important step forward in addressing the challenges of 3D reconstruction in the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
OpenMaterial: A Comprehensive Dataset of Complex Materials for 3D Reconstruction
Zheng Dang, Jialu Huang, Fei Wang, Mathieu Salzmann
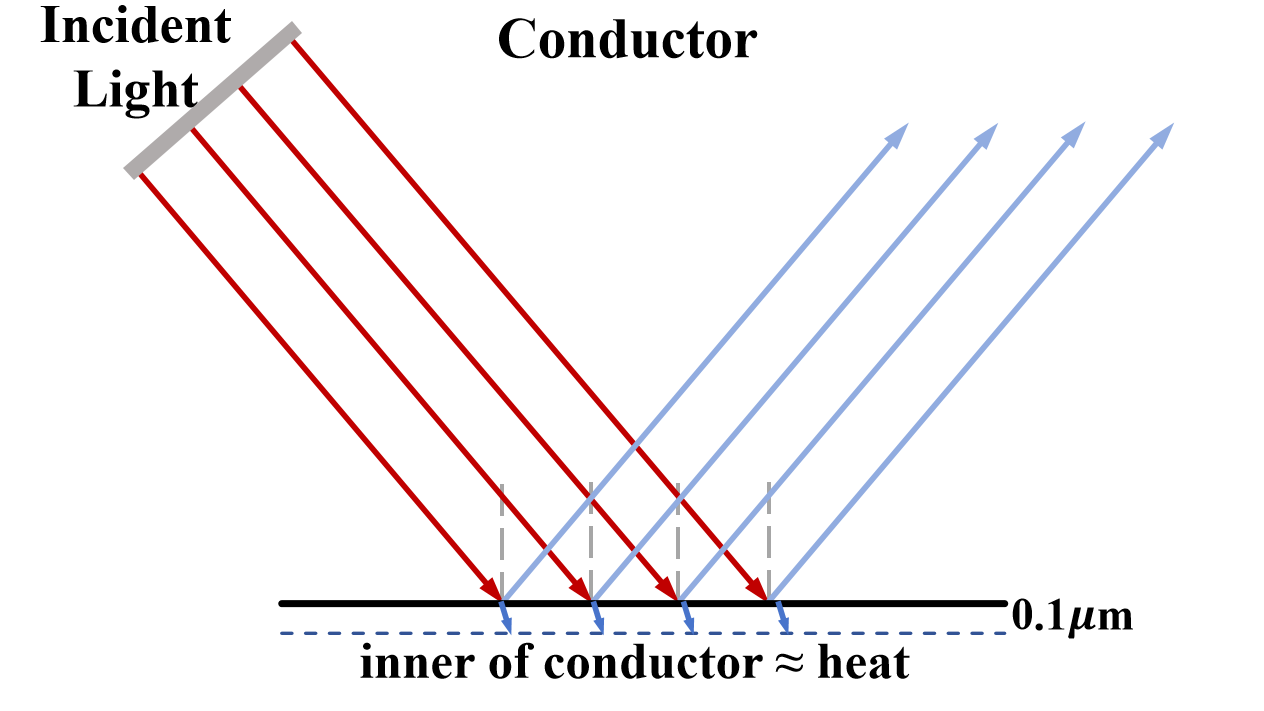
Recent advances in deep learning such as neural radiance fields and implicit neural representations have significantly propelled the field of 3D reconstruction. However, accurately reconstructing objects with complex optical properties, such as metals and glass, remains a formidable challenge due to their unique specular and light-transmission characteristics. To facilitate the development of solutions to these challenges, we introduce the OpenMaterial dataset, comprising 1001 objects made of 295 distinct materials-including conductors, dielectrics, plastics, and their roughened variants- and captured under 723 diverse lighting conditions. To this end, we utilized physics-based rendering with laboratory-measured Indices of Refraction (IOR) and generated high-fidelity multiview images that closely replicate real-world objects. OpenMaterial provides comprehensive annotations, including 3D shape, material type, camera pose, depth, and object mask. It stands as the first large-scale dataset enabling quantitative evaluations of existing algorithms on objects with diverse and challenging materials, thereby paving the way for the development of 3D reconstruction algorithms capable of handling complex material properties.
Read more6/14/2024

0
MatSynth: A Modern PBR Materials Dataset
Giuseppe Vecchio, Valentin Deschaintre
We introduce MatSynth, a dataset of 4,000+ CC0 ultra-high resolution PBR materials. Materials are crucial components of virtual relightable assets, defining the interaction of light at the surface of geometries. Given their importance, significant research effort was dedicated to their representation, creation and acquisition. However, in the past 6 years, most research in material acquisiton or generation relied either on the same unique dataset, or on company-owned huge library of procedural materials. With this dataset we propose a significantly larger, more diverse, and higher resolution set of materials than previously publicly available. We carefully discuss the data collection process and demonstrate the benefits of this dataset on material acquisition and generation applications. The complete data further contains metadata with each material's origin, license, category, tags, creation method and, when available, descriptions and physical size, as well as 3M+ renderings of the augmented materials, in 1K, under various environment lightings. The MatSynth dataset is released through the project page at: https://www.gvecchio.com/matsynth.
Read more5/29/2024

0
Object-Oriented Material Classification and 3D Clustering for Improved Semantic Perception and Mapping in Mobile Robots
Siva Krishna Ravipati, Ehsan Latif, Ramviyas Parasuraman, Suchendra M. Bhandarkar
Classification of different object surface material types can play a significant role in the decision-making algorithms for mobile robots and autonomous vehicles. RGB-based scene-level semantic segmentation has been well-addressed in the literature. However, improving material recognition using the depth modality and its integration with SLAM algorithms for 3D semantic mapping could unlock new potential benefits in the robotics perception pipeline. To this end, we propose a complementarity-aware deep learning approach for RGB-D-based material classification built on top of an object-oriented pipeline. The approach further integrates the ORB-SLAM2 method for 3D scene mapping with multiscale clustering of the detected material semantics in the point cloud map generated by the visual SLAM algorithm. Extensive experimental results with existing public datasets and newly contributed real-world robot datasets demonstrate a significant improvement in material classification and 3D clustering accuracy compared to state-of-the-art approaches for 3D semantic scene mapping.
Read more7/9/2024
🏷️
0
Objects With Lighting: A Real-World Dataset for Evaluating Reconstruction and Rendering for Object Relighting
Benjamin Ummenhofer, Sanskar Agrawal, Rene Sepulveda, Yixing Lao, Kai Zhang, Tianhang Cheng, Stephan Richter, Shenlong Wang, German Ros
Reconstructing an object from photos and placing it virtually in a new environment goes beyond the standard novel view synthesis task as the appearance of the object has to not only adapt to the novel viewpoint but also to the new lighting conditions and yet evaluations of inverse rendering methods rely on novel view synthesis data or simplistic synthetic datasets for quantitative analysis. This work presents a real-world dataset for measuring the reconstruction and rendering of objects for relighting. To this end, we capture the environment lighting and ground truth images of the same objects in multiple environments allowing to reconstruct the objects from images taken in one environment and quantify the quality of the rendered views for the unseen lighting environments. Further, we introduce a simple baseline composed of off-the-shelf methods and test several state-of-the-art methods on the relighting task and show that novel view synthesis is not a reliable proxy to measure performance. Code and dataset are available at https://github.com/isl-org/objects-with-lighting .
Read more4/16/2024