Optimal Potential Shaping on SE(3) via Neural ODEs on Lie Groups

0

Sign in to get full access
Overview
- Explains how neural ordinary differential equations (ODEs) can be used to optimize potential shaping on the special Euclidean group SE(3)
- Introduces a novel neural ODE framework for learning optimal vector fields on Lie groups
- Demonstrates the approach on a simulated robotic manipulation task
Plain English Explanation
This research paper explores how neural ODEs can be used to optimize potential shaping on the special Euclidean group SE(3). SE(3) is the group of rigid body motions in 3D space, which is important for applications like robot manipulation.
The key idea is to use a neural ODE to learn an optimal vector field on SE(3) that guides the motion of a robotic system. This allows for more flexible and expressive potential functions compared to traditional approaches. The neural ODE framework can capture the underlying Lie group structure, leading to physically meaningful and provably stable vector fields.
The authors demonstrate their approach on a simulated robotic manipulation task, showing improved performance compared to baseline methods. By leveraging the power of neural networks and the structure of Lie groups, this research opens up new possibilities for optimizing robot motion planning and control.
Technical Explanation
The paper introduces a novel neural ODE framework for learning optimal vector fields on Lie groups, which the authors apply to the problem of potential shaping on SE(3). They first provide background on neural ODEs and discuss how this relates to prior works on Hamiltonian neural ODEs and optimal control.
The core technical contribution is a framework for learning optimal vector fields on Lie groups using neural ODEs. This involves defining a neural network that parameterizes the vector field, and then optimizing this vector field to minimize a task-specific cost function. The authors leverage the Lie group structure to ensure the vector field satisfies desirable properties like invariance and stability.
In the experiments, the authors apply this approach to a robotic manipulation task, where the goal is to shape the potential function to guide the robot's motion. They show that the neural ODE-based approach outperforms baseline methods, demonstrating the benefits of the flexible and structured vector field representation.
Critical Analysis
The paper presents a technically sound approach for optimizing potential shaping on SE(3) using neural ODEs. The authors carefully address important considerations like Lie group structure and stability, which is crucial for real-world robotics applications.
One potential limitation is the reliance on a simulator for the experiments, which may not fully capture the complexities of real-world robot dynamics. Additionally, the authors do not provide extensive comparisons to other state-of-the-art methods for potential shaping or motion planning on SE(3).
Further research could explore the scalability of the approach to more complex robotic systems, as well as its robustness to model uncertainties and external disturbances. Validating the approach on physical robot platforms would also be an important next step.
Conclusion
This research paper introduces a novel neural ODE framework for learning optimal vector fields on Lie groups, with a particular focus on potential shaping for robot manipulation tasks on SE(3). The authors demonstrate the effectiveness of their approach on a simulated robotic manipulation problem, showcasing the benefits of the flexible and structured vector field representation.
By leveraging the power of neural networks and the underlying Lie group structure, this work opens up new possibilities for optimizing robot motion planning and control. The insights and techniques presented in this paper could have far-reaching implications for a wide range of robotics and control applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Optimal Potential Shaping on SE(3) via Neural ODEs on Lie Groups
Yannik P. Wotte, Federico Califano, Stefano Stramigioli
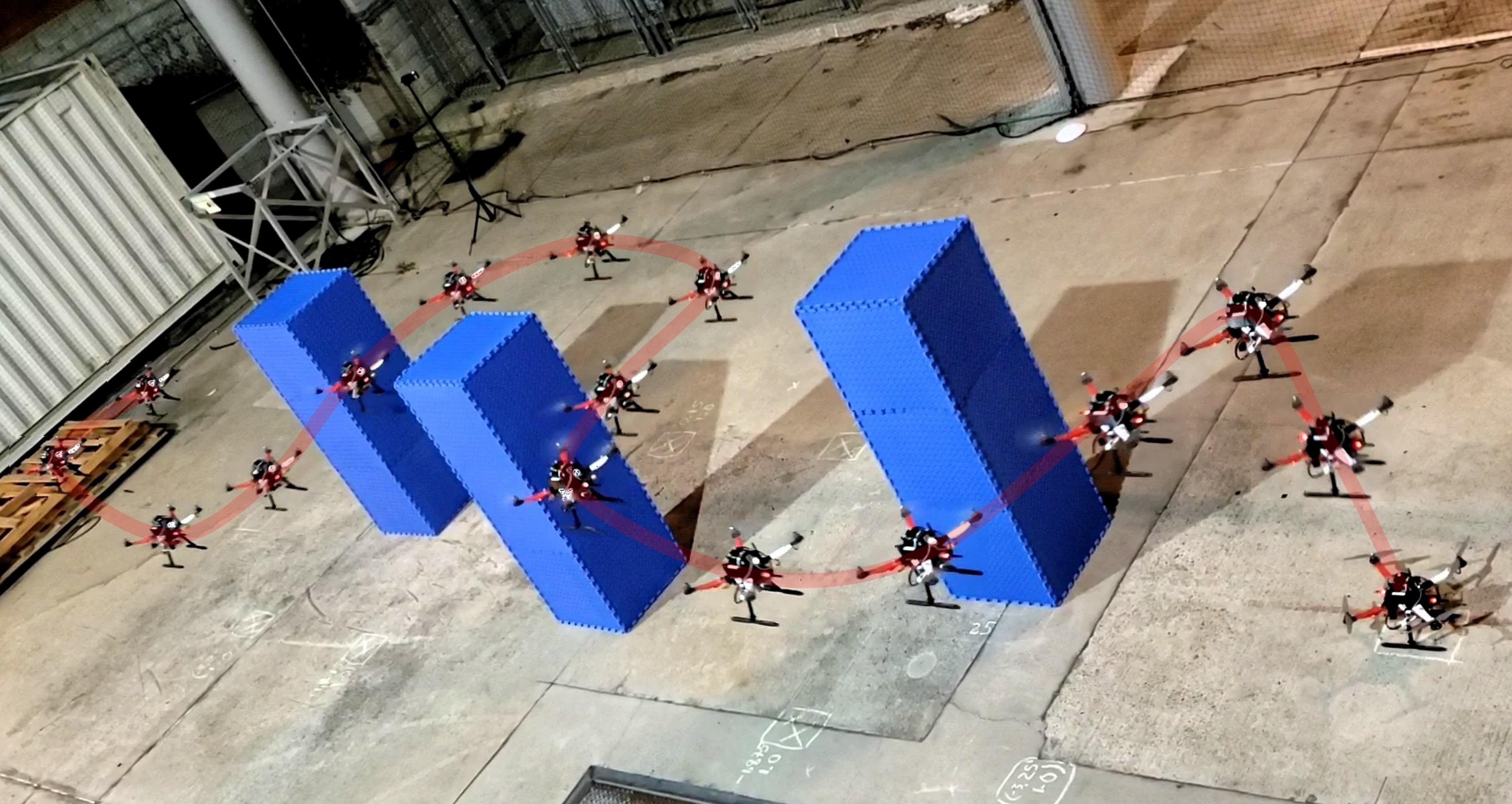
This work presents a novel approach for the optimization of dynamic systems on finite-dimensional Lie groups. We rephrase dynamic systems as so-called neural ordinary differential equations (neural ODEs), and formulate the optimization problem on Lie groups. A gradient descent optimization algorithm is presented to tackle the optimization numerically. Our algorithm is scalable, and applicable to any finite dimensional Lie group, including matrix Lie groups. By representing the system at the Lie algebra level, we reduce the computational cost of the gradient computation. In an extensive example, optimal potential energy shaping for control of a rigid body is treated. The optimal control problem is phrased as an optimization of a neural ODE on the Lie group SE(3), and the controller is iteratively optimized. The final controller is validated on a state-regulation task.
Read more9/18/2024
0
Port-Hamiltonian Neural ODE Networks on Lie Groups For Robot Dynamics Learning and Control
Thai Duong, Abdullah Altawaitan, Jason Stanley, Nikolay Atanasov
Accurate models of robot dynamics are critical for safe and stable control and generalization to novel operational conditions. Hand-designed models, however, may be insufficiently accurate, even after careful parameter tuning. This motivates the use of machine learning techniques to approximate the robot dynamics over a training set of state-control trajectories. The dynamics of many robots are described in terms of their generalized coordinates on a matrix Lie group, e.g. on $SE(3)$ for ground, aerial, and underwater vehicles, and generalized velocity, and satisfy conservation of energy principles. This paper proposes a port-Hamiltonian formulation over a Lie group of the structure of a neural ordinary differential equation (ODE) network to approximate the robot dynamics. In contrast to a black-box ODE network, our formulation embeds energy conservation principle and Lie group's constraints in the dynamics model and explicitly accounts for energy-dissipation effect such as friction and drag forces in the dynamics model. We develop energy shaping and damping injection control for the learned, potentially under-actuated Hamiltonian dynamics to enable a unified approach for stabilization and trajectory tracking with various robot platforms.
Read more6/13/2024
🧠
0
Solving Elliptic Optimal Control Problems via Neural Networks and Optimality System
Yongcheng Dai, Bangti Jin, Ramesh Sau, Zhi Zhou
In this work, we investigate a neural network based solver for optimal control problems (without / with box constraint) for linear and semilinear second-order elliptic problems. It utilizes a coupled system derived from the first-order optimality system of the optimal control problem, and employs deep neural networks to represent the solutions to the reduced system. We present an error analysis of the scheme, and provide $L^2(Omega)$ error bounds on the state, control and adjoint in terms of neural network parameters (e.g., depth, width, and parameter bounds) and the numbers of sampling points. The main tools in the analysis include offset Rademacher complexity and boundedness and Lipschitz continuity of neural network functions. We present several numerical examples to illustrate the method and compare it with two existing ones.
Read more5/9/2024

0
Latent Space Energy-based Neural ODEs
Sheng Cheng, Deqian Kong, Jianwen Xie, Kookjin Lee, Ying Nian Wu, Yezhou Yang
This paper introduces a novel family of deep dynamical models designed to represent continuous-time sequence data. This family of models generates each data point in the time series by a neural emission model, which is a non-linear transformation of a latent state vector. The trajectory of the latent states is implicitly described by a neural ordinary differential equation (ODE), with the initial state following an informative prior distribution parameterized by an energy-based model. Furthermore, we can extend this model to disentangle dynamic states from underlying static factors of variation, represented as time-invariant variables in the latent space. We train the model using maximum likelihood estimation with Markov chain Monte Carlo (MCMC) in an end-to-end manner, without requiring additional assisting components such as an inference network. Our experiments on oscillating systems, videos and real-world state sequences (MuJoCo) illustrate that ODEs with the learnable energy-based prior outperform existing counterparts, and can generalize to new dynamic parameterization, enabling long-horizon predictions.
Read more9/9/2024