Optimizing Diffusion Models for Joint Trajectory Prediction and Controllable Generation

0

Sign in to get full access
Overview
- Optimizing Diffusion Models for Joint Trajectory Prediction and Controllable Generation
- Leverages diffusion models for autonomous driving applications, including trajectory prediction and controllable trajectory generation
- Proposes an approach to jointly train a diffusion model for both prediction and generation tasks
Plain English Explanation
Diffusion models are a type of machine learning technique that can be used to generate new data, such as images or text, by gradually transforming random noise into something more meaningful. In this paper, the researchers explore using diffusion models for autonomous driving applications, specifically for predicting future trajectories and generating controlled trajectories.
The key idea is to train a single diffusion model that can handle both trajectory prediction and controllable trajectory generation tasks. This allows the model to learn a shared representation of vehicle trajectories, which can then be used for both forecasting future paths and generating new trajectories that meet certain constraints or goals.
The researchers demonstrate that this joint training approach leads to improved performance on both tasks compared to training separate models. This could be useful for applications like self-driving cars, where the ability to accurately predict and control vehicle movements is crucial for safe and efficient operation.
Technical Explanation
The paper proposes a method for jointly training a diffusion model to perform both trajectory prediction and controllable trajectory generation tasks. The model takes in the current state of a vehicle (e.g., position, velocity) and learns to predict the most likely future trajectory as well as generate new trajectories that satisfy specified constraints, such as passing through certain waypoints or avoiding obstacles.
The key innovation is training a single diffusion model to handle both tasks, rather than building separate models for prediction and generation. This allows the model to learn a shared representation of vehicle trajectories, which can then be leveraged for both forecasting and controlled generation.
The researchers evaluate their approach on several benchmark datasets for autonomous driving, comparing the joint model to baselines that train separate models for prediction and generation. The results show that the joint model achieves better performance on both tasks, demonstrating the benefits of the proposed approach.
Critical Analysis
The paper presents a compelling approach for leveraging diffusion models in autonomous driving applications, but there are a few potential limitations and areas for further research:
- The training process may be computationally intensive, as the model needs to learn a shared representation that can handle both prediction and generation tasks.
- The evaluation focuses on synthetic datasets, and it would be interesting to see how the model performs on real-world autonomous driving data.
- The generation task is limited to satisfying specified constraints, and it may be valuable to explore more open-ended trajectory generation, where the model can create novel, unconstrained trajectories.
Overall, the paper makes a strong case for the usefulness of diffusion models in autonomous driving and provides a solid foundation for future research in this area. However, there is still room for improvement, particularly in terms of computational efficiency and the ability to handle more complex, real-world scenarios.
Conclusion
This paper demonstrates the potential of diffusion models for jointly tackling the challenges of trajectory prediction and controllable trajectory generation in autonomous driving applications. By training a single diffusion model to handle both tasks, the researchers were able to achieve better performance than approaches that use separate models.
The findings suggest that diffusion models can be a powerful tool for autonomous driving, as they can not only forecast future vehicle movements, but also generate new trajectories that satisfy specific constraints. This could be valuable for applications like route planning, obstacle avoidance, and collaboration between multiple autonomous agents.
While the paper presents a promising approach, there are still areas for further research to improve the computational efficiency and real-world applicability of the proposed method. Nonetheless, this work represents an important step forward in the use of advanced machine learning techniques for autonomous driving and could have significant implications for the development of safer and more capable self-driving systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Optimizing Diffusion Models for Joint Trajectory Prediction and Controllable Generation
Yixiao Wang, Chen Tang, Lingfeng Sun, Simone Rossi, Yichen Xie, Chensheng Peng, Thomas Hannagan, Stefano Sabatini, Nicola Poerio, Masayoshi Tomizuka, Wei Zhan
Diffusion models are promising for joint trajectory prediction and controllable generation in autonomous driving, but they face challenges of inefficient inference steps and high computational demands. To tackle these challenges, we introduce Optimal Gaussian Diffusion (OGD) and Estimated Clean Manifold (ECM) Guidance. OGD optimizes the prior distribution for a small diffusion time $T$ and starts the reverse diffusion process from it. ECM directly injects guidance gradients to the estimated clean manifold, eliminating extensive gradient backpropagation throughout the network. Our methodology streamlines the generative process, enabling practical applications with reduced computational overhead. Experimental validation on the large-scale Argoverse 2 dataset demonstrates our approach's superior performance, offering a viable solution for computationally efficient, high-quality joint trajectory prediction and controllable generation for autonomous driving. Our project webpage is at https://yixiaowang7.github.io/OptTrajDiff_Page/.
Read more8/2/2024
0
Constraint-Aware Diffusion Models for Trajectory Optimization
Anjian Li, Zihan Ding, Adji Bousso Dieng, Ryne Beeson
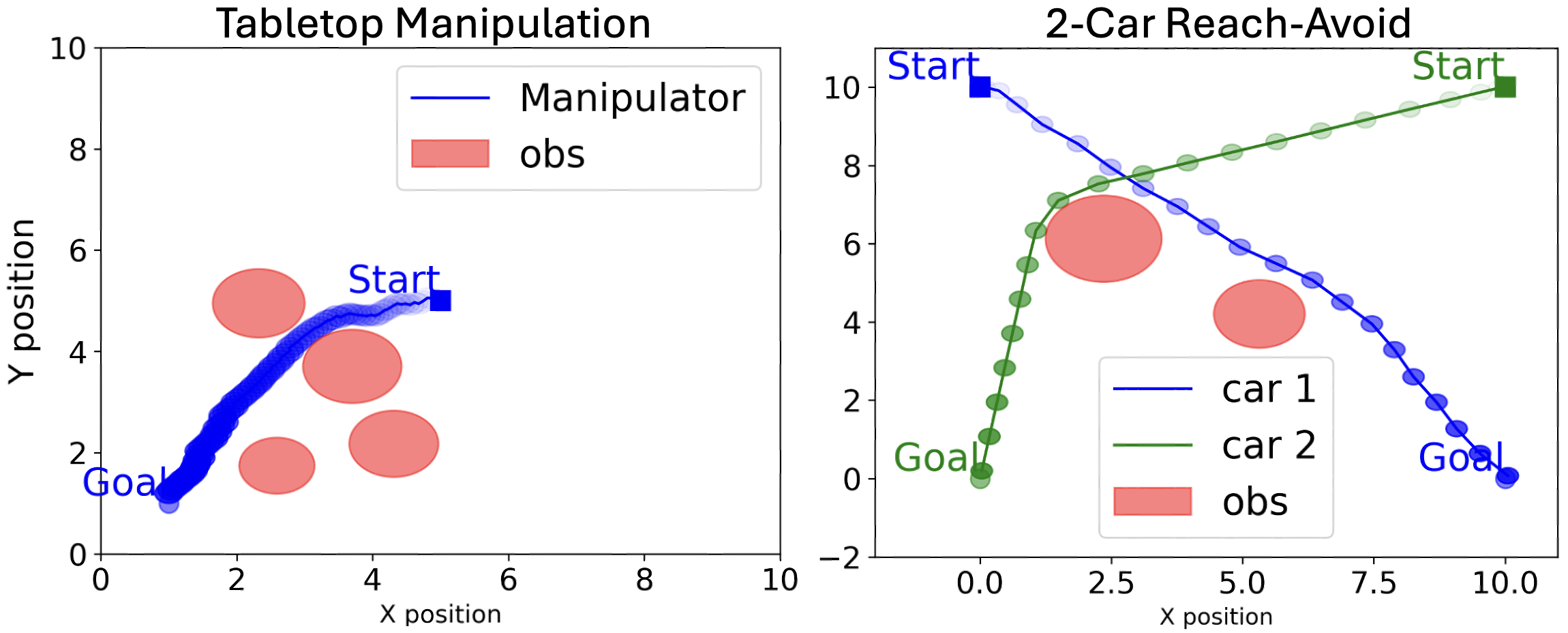
The diffusion model has shown success in generating high-quality and diverse solutions to trajectory optimization problems. However, diffusion models with neural networks inevitably make prediction errors, which leads to constraint violations such as unmet goals or collisions. This paper presents a novel constraint-aware diffusion model for trajectory optimization. We introduce a novel hybrid loss function for training that minimizes the constraint violation of diffusion samples compared to the groundtruth while recovering the original data distribution. Our model is demonstrated on tabletop manipulation and two-car reach-avoid problems, outperforming traditional diffusion models in minimizing constraint violations while generating samples close to locally optimal solutions.
Read more6/4/2024

0
ADM: Accelerated Diffusion Model via Estimated Priors for Robust Motion Prediction under Uncertainties
Jiahui Li, Tianle Shen, Zekai Gu, Jiawei Sun, Chengran Yuan, Yuhang Han, Shuo Sun, Marcelo H. Ang Jr
Motion prediction is a challenging problem in autonomous driving as it demands the system to comprehend stochastic dynamics and the multi-modal nature of real-world agent interactions. Diffusion models have recently risen to prominence, and have proven particularly effective in pedestrian motion prediction tasks. However, the significant time consumption and sensitivity to noise have limited the real-time predictive capability of diffusion models. In response to these impediments, we propose a novel diffusion-based, acceleratable framework that adeptly predicts future trajectories of agents with enhanced resistance to noise. The core idea of our model is to learn a coarse-grained prior distribution of trajectory, which can skip a large number of denoise steps. This advancement not only boosts sampling efficiency but also maintains the fidelity of prediction accuracy. Our method meets the rigorous real-time operational standards essential for autonomous vehicles, enabling prompt trajectory generation that is vital for secure and efficient navigation. Through extensive experiments, our method speeds up the inference time to 136ms compared to standard diffusion model, and achieves significant improvement in multi-agent motion prediction on the Argoverse 1 motion forecasting dataset.
Read more5/3/2024
👀
0
Diffusion-ES: Gradient-free Planning with Diffusion for Autonomous Driving and Zero-Shot Instruction Following
Brian Yang, Huangyuan Su, Nikolaos Gkanatsios, Tsung-Wei Ke, Ayush Jain, Jeff Schneider, Katerina Fragkiadaki
Diffusion models excel at modeling complex and multimodal trajectory distributions for decision-making and control. Reward-gradient guided denoising has been recently proposed to generate trajectories that maximize both a differentiable reward function and the likelihood under the data distribution captured by a diffusion model. Reward-gradient guided denoising requires a differentiable reward function fitted to both clean and noised samples, limiting its applicability as a general trajectory optimizer. In this paper, we propose DiffusionES, a method that combines gradient-free optimization with trajectory denoising to optimize black-box non-differentiable objectives while staying in the data manifold. Diffusion-ES samples trajectories during evolutionary search from a diffusion model and scores them using a black-box reward function. It mutates high-scoring trajectories using a truncated diffusion process that applies a small number of noising and denoising steps, allowing for much more efficient exploration of the solution space. We show that DiffusionES achieves state-of-the-art performance on nuPlan, an established closed-loop planning benchmark for autonomous driving. Diffusion-ES outperforms existing sampling-based planners, reactive deterministic or diffusion-based policies, and reward-gradient guidance. Additionally, we show that unlike prior guidance methods, our method can optimize non-differentiable language-shaped reward functions generated by few-shot LLM prompting. When guided by a human teacher that issues instructions to follow, our method can generate novel, highly complex behaviors, such as aggressive lane weaving, which are not present in the training data. This allows us to solve the hardest nuPlan scenarios which are beyond the capabilities of existing trajectory optimization methods and driving policies.
Read more7/18/2024