Pegasus Simulator: An Isaac Sim Framework for Multiple Aerial Vehicles Simulation

0

Sign in to get full access
Overview
- This paper presents the Pegasus Simulator, a framework based on the Isaac Sim platform for simulating multiple aerial vehicles.
- The simulator aims to provide a flexible and scalable environment for testing and developing autonomous aerial systems.
- It incorporates features like high-fidelity physics, sensor modeling, and support for various aerial vehicle types.
Plain English Explanation
The Pegasus Simulator is a tool that allows researchers and developers to simulate the behavior of multiple drones or other aerial vehicles in a virtual environment. It is built on top of the Isaac Sim platform, which provides a realistic physics simulation and accurate sensor modeling.
The main goal of the Pegasus Simulator is to give users a flexible and scalable way to test and develop autonomous aerial systems, such as self-flying drones or airships. By running simulations in this virtual environment, researchers can experiment with different control algorithms, sensor configurations, and environmental conditions without the need for expensive real-world hardware or the risks associated with testing in the physical world.
The simulator supports a variety of aerial vehicle types, allowing users to model different platforms and explore their unique characteristics and behaviors. It also includes features like closed-loop model identification and model predictive control-based navigation, which can help improve the realism and fidelity of the simulations.
Technical Explanation
The Pegasus Simulator is built on top of the Isaac Sim framework, which provides a high-fidelity physics engine and advanced sensor modeling capabilities. The simulator supports various aerial vehicle types, including multirotor drones, fixed-wing aircraft, and airships.
The key features of the Pegasus Simulator include:
- Flexible vehicle modeling: Users can configure the physical properties, control systems, and sensor suites of the aerial vehicles to match their specific requirements.
- High-fidelity physics simulation: The simulator utilizes the PhysX engine to provide realistic aerodynamics, rigid body dynamics, and collision detection.
- Sensor modeling: The simulator includes models for various sensors, such as GPS, IMU, and cameras, allowing users to test their perception and navigation algorithms in a realistic virtual environment.
- Closed-loop model identification: The simulator supports closed-loop model identification techniques, which can help improve the accuracy of the vehicle models and the overall fidelity of the simulations.
- Model predictive control-based navigation: The simulator provides a framework for testing model predictive control-based navigation algorithms, which can be useful for planning and controlling the motion of the aerial vehicles.
The paper describes the architecture and implementation of the Pegasus Simulator, as well as several use cases and validation experiments that demonstrate its capabilities.
Critical Analysis
The Pegasus Simulator presents a comprehensive framework for simulating multiple aerial vehicles, which can be a valuable tool for researchers and developers in the field of autonomous aerial systems. The authors have clearly put a lot of effort into designing and implementing a highly flexible and scalable simulation environment.
One potential limitation of the Pegasus Simulator is the reliance on the Isaac Sim platform, which may not be familiar to all users. The authors could consider providing more documentation and support for users who are new to the Isaac Sim ecosystem.
Additionally, while the simulator includes advanced features like closed-loop model identification and model predictive control, the paper does not provide a thorough evaluation of the accuracy and fidelity of the simulations compared to real-world data. Further validation and benchmarking against physical experiments would help strengthen the credibility of the Pegasus Simulator.
Another area for potential improvement could be the integration of more diverse aerial vehicle types, such as hybrid-electric propulsion systems or novel configurations like VTOL aircraft. Expanding the range of supported vehicles could make the Pegasus Simulator even more versatile and valuable for the research community.
Overall, the Pegasus Simulator appears to be a promising tool for simulating multiple aerial vehicles, and the authors have demonstrated its capabilities through various use cases. Continued development and validation of the framework could further enhance its utility and impact in the field of autonomous aerial systems.
Conclusion
The Pegasus Simulator is a comprehensive framework for simulating multiple aerial vehicles, built on top of the Isaac Sim platform. It provides a flexible and scalable environment for testing and developing autonomous aerial systems, with features like high-fidelity physics simulation, advanced sensor modeling, and support for various vehicle types.
The simulator's ability to accurately model the behavior of drones, fixed-wing aircraft, and airships in a virtual setting can be a valuable asset for researchers and developers working on autonomous aerial technologies. By running simulations in the Pegasus environment, they can experiment with different control algorithms, sensor configurations, and environmental conditions without the risks and costs associated with physical testing.
While the Pegasus Simulator shows promise, further validation and expansion of its capabilities could enhance its utility and impact in the field of autonomous aerial systems. Continued development and integration with the broader research community could help drive advancements in this exciting and rapidly evolving area of technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Pegasus Simulator: An Isaac Sim Framework for Multiple Aerial Vehicles Simulation
Marcelo Jacinto, Jo~ao Pinto, Jay Patrikar, John Keller, Rita Cunha, Sebastian Scherer, Ant'onio Pascoal
Developing and testing novel control and motion planning algorithms for aerial vehicles can be a challenging task, with the robotics community relying more than ever on 3D simulation technologies to evaluate the performance of new algorithms in a variety of conditions and environments. In this work, we introduce the Pegasus Simulator, a modular framework implemented as an NVIDIA Isaac Sim extension that enables real-time simulation of multiple multirotor vehicles in photo-realistic environments, while providing out-of-the-box integration with the widely adopted PX4-Autopilot and ROS2 through its modular implementation and intuitive graphical user interface. To demonstrate some of its capabilities, a nonlinear controller was implemented and simulation results for two drones performing aggressive flight maneuvers are presented. Code and documentation for this framework are also provided as supplementary material.
Read more4/16/2024
🗣️
0
Learning to Fly in Seconds
Jonas Eschmann, Dario Albani, Giuseppe Loianno
Learning-based methods, particularly Reinforcement Learning (RL), hold great promise for streamlining deployment, enhancing performance, and achieving generalization in the control of autonomous multirotor aerial vehicles. Deep RL has been able to control complex systems with impressive fidelity and agility in simulation but the simulation-to-reality transfer often brings a hard-to-bridge reality gap. Moreover, RL is commonly plagued by prohibitively long training times. In this work, we propose a novel asymmetric actor-critic-based architecture coupled with a highly reliable RL-based training paradigm for end-to-end quadrotor control. We show how curriculum learning and a highly optimized simulator enhance sample complexity and lead to fast training times. To precisely discuss the challenges related to low-level/end-to-end multirotor control, we also introduce a taxonomy that classifies the existing levels of control abstractions as well as non-linearities and domain parameters. Our framework enables Simulation-to-Reality (Sim2Real) transfer for direct RPM control after only 18 seconds of training on a consumer-grade laptop as well as its deployment on microcontrollers to control a multirotor under real-time guarantees. Finally, our solution exhibits competitive performance in trajectory tracking, as demonstrated through various experimental comparisons with existing state-of-the-art control solutions using a real Crazyflie nano quadrotor. We open source the code including a very fast multirotor dynamics simulator that can simulate about 5 months of flight per second on a laptop GPU. The fast training times and deployment to a cheap, off-the-shelf quadrotor lower the barriers to entry and help democratize the research and development of these systems.
Read more4/10/2024
📉
0
Aerostack2: A Software Framework for Developing Multi-robot Aerial Systems
Miguel Fernandez-Cortizas, Martin Molina, Pedro Arias-Perez, Rafael Perez-Segui, David Perez-Saura, Pascual Campoy
The development of autonomous aerial systems, particularly for multi-robot configurations, is a complex challenge requiring multidisciplinary expertise. Unlike ground robotics, aerial robotics has seen limited standardization, leading to fragmented development efforts. To address this gap, we introduce Aerostack2, a comprehensive, open-source ROS 2 based framework designed for creating versatile and robust multi-robot aerial systems. Aerostack2 features platform independence, a modular plugin architecture, and behavior-based mission control, enabling easy customization and integration across various platforms. In this paper, we detail the full architecture of Aerostack2, which has been tested with several platforms in both simulation and real flights. We demonstrate its effectiveness through multiple validation scenarios, highlighting its potential to accelerate innovation and enhance collaboration in the aerial robotics community.
Read more9/4/2024
0
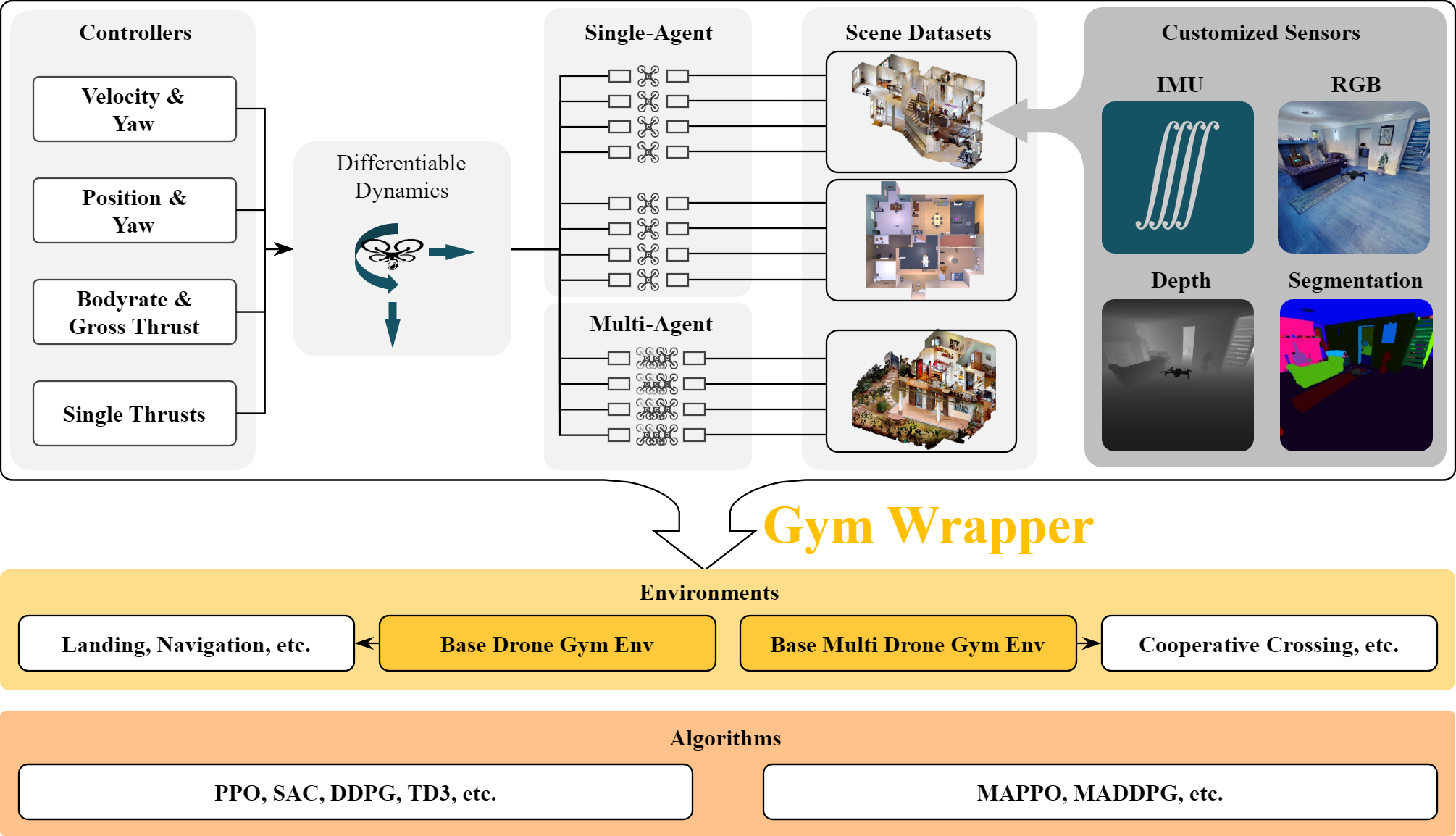
VisFly: An Efficient and Versatile Simulator for Training Vision-based Flight
Fanxing Li, Fangyu Sun, Tianbao Zhang, Danping Zou
We present VisFly, a quadrotor simulator designed to efficiently train vision-based flight policies using reinforcement learning algorithms. VisFly offers a user-friendly framework and interfaces, leveraging Habitat-Sim's rendering engines to achieve frame rates exceeding 10,000 frames per second for rendering motion and sensor data. The simulator incorporates differentiable physics and is seamlessly wrapped with the Gym environment, facilitating the straightforward implementation of various learning algorithms. It supports the directly importing open-source scene datasets compatible with Habitat-Sim, enabling training on diverse real-world environments simultaneously. To validate our simulator, we also make three reinforcement learning examples for typical flight tasks relying on visual observations. The simulator is now available at [https://github.com/SJTU-ViSYS-team/VisFly].
Read more9/10/2024