Perception Simplex: Verifiable Collision Avoidance in Autonomous Vehicles Amidst Obstacle Detection Faults

0
🔎
Sign in to get full access
Overview
- Deep learning has revolutionized cyber-physical applications, including autonomous vehicles.
- Real-world collisions involving autonomous vehicles have raised safety concerns about using Deep Neural Networks (DNNs) in safety-critical tasks like perception.
- The inherent unverifiability of DNNs poses a challenge in ensuring their safe and reliable operation.
Plain English Explanation
Deep learning, a powerful AI technique, has transformed many industries, including autonomous vehicles (self-driving cars). However, some real-world accidents involving autonomous vehicles have raised serious concerns about the safety of using deep neural networks (a type of deep learning model) for critical tasks like perceiving the environment around the vehicle.
The problem is that deep neural networks are essentially "black boxes" - it's very difficult to fully understand and verify how they arrive at their outputs. This makes it challenging to ensure that they will behave reliably and safely, especially in high-stakes situations where mistakes could have severe consequences.
Technical Explanation
In this work, the researchers propose a new system called Perception Simplex (PS) that is designed to provide fault-tolerant obstacle detection and collision avoidance for autonomous vehicles. The key idea is to combine the deep learning-based perception system with a more traditional, verifiable obstacle detection algorithm.
The researchers first analyze the capabilities and limitations of an existing LiDAR-based (laser-based) classical obstacle detection algorithm. This type of analysis and verification has not been possible for deep learning-based perception systems. By using this verified algorithm alongside the deep learning system, PS can identify when the deep learning system is making mistakes in detecting obstacles. When such faults are detected, the system can then take appropriate corrective actions to ensure safety.
Through extensive testing and simulations, the researchers demonstrate that PS can provide predictable and reliable fault tolerance against errors in obstacle detection, establishing a robust safety guarantee.
Critical Analysis
The researchers acknowledge that while deep learning has enabled significant advances in autonomous vehicle perception, the inherent lack of verifiability of these models remains a key challenge. The Perception Simplex architecture they propose is an interesting approach to addressing this challenge by combining deep learning with a more traditional, verifiable algorithm.
One potential limitation of this approach is that it may not be able to fully leverage the powerful capabilities of deep learning for perception tasks. The reliance on the classical algorithm means that the system may not be able to detect certain types of obstacles or hazards that the deep learning model would be able to identify.
Additionally, the researchers note that their analysis and testing was conducted in simulation, and further real-world validation would be necessary to fully assess the system's performance and reliability. Deploying such a safety-critical system in the real world would require extensive testing and certification to ensure it meets the necessary safety standards.
Conclusion
In summary, this research proposes a novel approach to addressing the safety concerns around the use of deep learning for perception in autonomous vehicles. By combining deep learning with a verifiable classical algorithm, the Perception Simplex system aims to provide a more predictable and reliable fault-tolerance mechanism. While this is an important step forward, further research and real-world validation will be necessary to fully address the challenges of ensuring the safe and reliable operation of autonomous vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔎
0
Perception Simplex: Verifiable Collision Avoidance in Autonomous Vehicles Amidst Obstacle Detection Faults
Ayoosh Bansal, Hunmin Kim, Simon Yu, Bo Li, Naira Hovakimyan, Marco Caccamo, Lui Sha
Advances in deep learning have revolutionized cyber-physical applications, including the development of Autonomous Vehicles. However, real-world collisions involving autonomous control of vehicles have raised significant safety concerns regarding the use of Deep Neural Networks (DNN) in safety-critical tasks, particularly Perception. The inherent unverifiability of DNNs poses a key challenge in ensuring their safe and reliable operation. In this work, we propose Perception Simplex (PS), a fault-tolerant application architecture designed for obstacle detection and collision avoidance. We analyze an existing LiDAR-based classical obstacle detection algorithm to establish strict bounds on its capabilities and limitations. Such analysis and verification have not been possible for deep learning-based perception systems yet. By employing verifiable obstacle detection algorithms, PS identifies obstacle existence detection faults in the output of unverifiable DNN-based object detectors. When faults with potential collision risks are detected, appropriate corrective actions are initiated. Through extensive analysis and software-in-the-loop simulations, we demonstrate that PS provides predictable and deterministic fault tolerance against obstacle existence detection faults, establishing a robust safety guarantee.
Read more4/8/2024
🏋️
0
Perceive With Confidence: Statistical Safety Assurances for Navigation with Learning-Based Perception
Anushri Dixit, Zhiting Mei, Meghan Booker, Mariko Storey-Matsutani, Allen Z. Ren, Anirudha Majumdar
Rapid advances in perception have enabled large pre-trained models to be used out of the box for transforming high-dimensional, noisy, and partial observations of the world into rich occupancy representations. However, the reliability of these models and consequently their safe integration onto robots remains unknown when deployed in environments unseen during training. In this work, we address this challenge by rigorously quantifying the uncertainty of pre-trained perception systems for object detection via a novel calibration technique based on conformal prediction. Crucially, this procedure guarantees robustness to distribution shifts in states when perceptual outputs are used in conjunction with a planner. As a result, the calibrated perception system can be used in combination with any safe planner to provide an end-to-end statistical assurance on safety in unseen environments. We evaluate the resulting approach, Perceive with Confidence (PwC), in simulation and on hardware where a quadruped robot navigates through previously unseen indoor, static environments. These experiments validate the safety assurances for obstacle avoidance provided by PwC and demonstrate up to $40%$ improvements in empirical safety compared to baselines.
Read more7/10/2024
0
Enhanced Visual SLAM for Collision-free Driving with Lightweight Autonomous Cars
Zhihao Lin, Zhen Tian, Qi Zhang, Hanyang Zhuang, Jianglin Lan
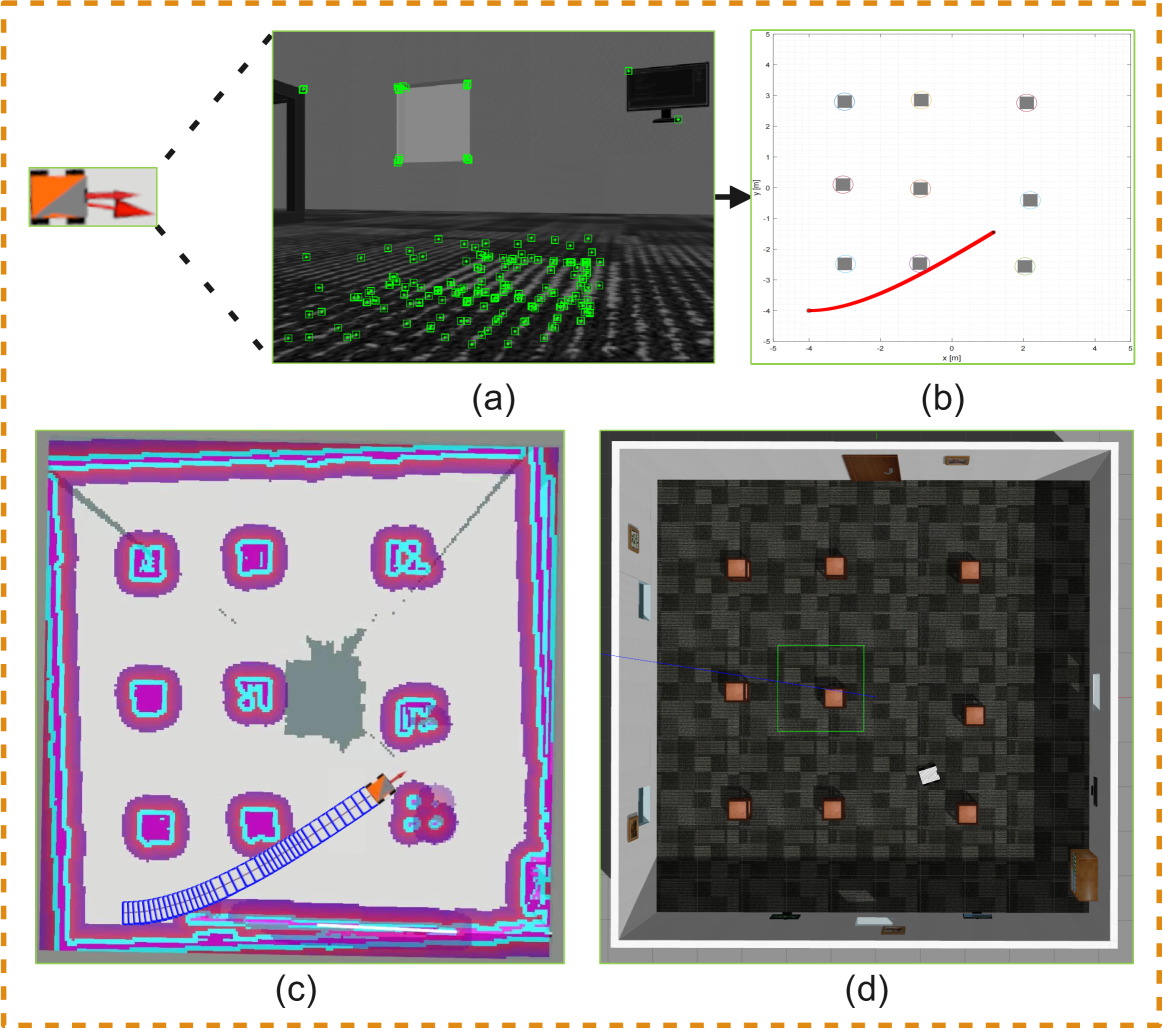
The paper presents a vision-based obstacle avoidance strategy for lightweight self-driving cars that can be run on a CPU-only device using a single RGB-D camera. The method consists of two steps: visual perception and path planning. The visual perception part uses ORBSLAM3 enhanced with optical flow to estimate the car's poses and extract rich texture information from the scene. In the path planning phase, we employ a method combining a control Lyapunov function and control barrier function in the form of quadratic program (CLF-CBF-QP) together with an obstacle shape reconstruction process (SRP) to plan safe and stable trajectories. To validate the performance and robustness of the proposed method, simulation experiments were conducted with a car in various complex indoor environments using the Gazebo simulation environment. Our method can effectively avoid obstacles in the scenes. The proposed algorithm outperforms benchmark algorithms in achieving more stable and shorter trajectories across multiple simulated scenes.
Read more8/22/2024
0
Robustness-Aware 3D Object Detection in Autonomous Driving: A Review and Outlook
Ziying Song, Lin Liu, Feiyang Jia, Yadan Luo, Guoxin Zhang, Lei Yang, Li Wang, Caiyan Jia
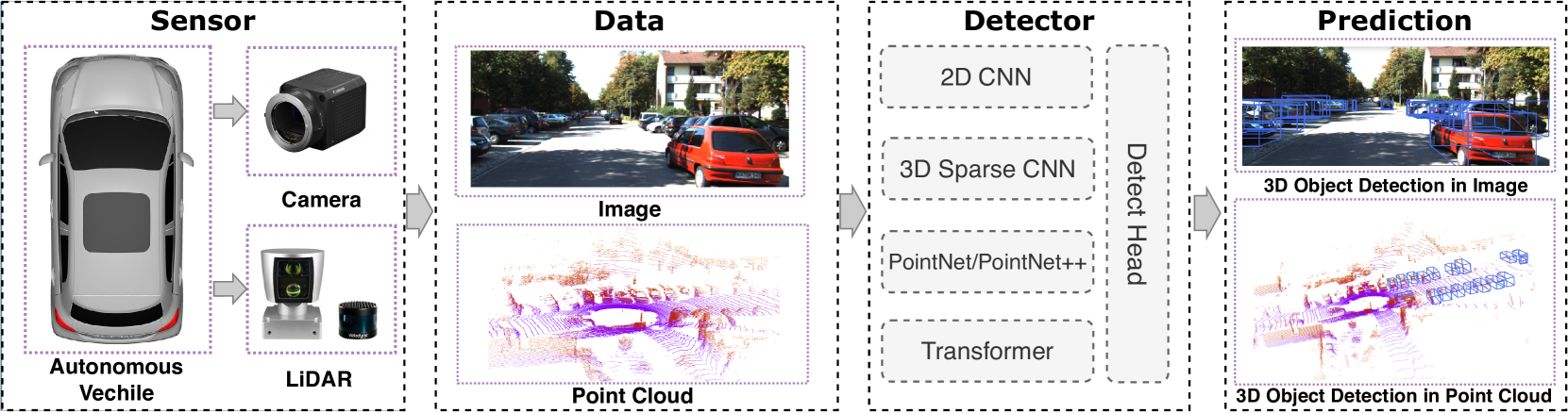
In the realm of modern autonomous driving, the perception system is indispensable for accurately assessing the state of the surrounding environment, thereby enabling informed prediction and planning. The key step to this system is related to 3D object detection that utilizes vehicle-mounted sensors such as LiDAR and cameras to identify the size, the category, and the location of nearby objects. Despite the surge in 3D object detection methods aimed at enhancing detection precision and efficiency, there is a gap in the literature that systematically examines their resilience against environmental variations, noise, and weather changes. This study emphasizes the importance of robustness, alongside accuracy and latency, in evaluating perception systems under practical scenarios. Our work presents an extensive survey of camera-only, LiDAR-only, and multi-modal 3D object detection algorithms, thoroughly evaluating their trade-off between accuracy, latency, and robustness, particularly on datasets like KITTI-C and nuScenes-C to ensure fair comparisons. Among these, multi-modal 3D detection approaches exhibit superior robustness, and a novel taxonomy is introduced to reorganize the literature for enhanced clarity. This survey aims to offer a more practical perspective on the current capabilities and the constraints of 3D object detection algorithms in real-world applications, thus steering future research towards robustness-centric advancements.
Read more8/16/2024