Trajectory Planning for Autonomous Driving in Unstructured Scenarios Based on Graph Neural Network and Numerical Optimization
2406.08855
0
0
Abstract
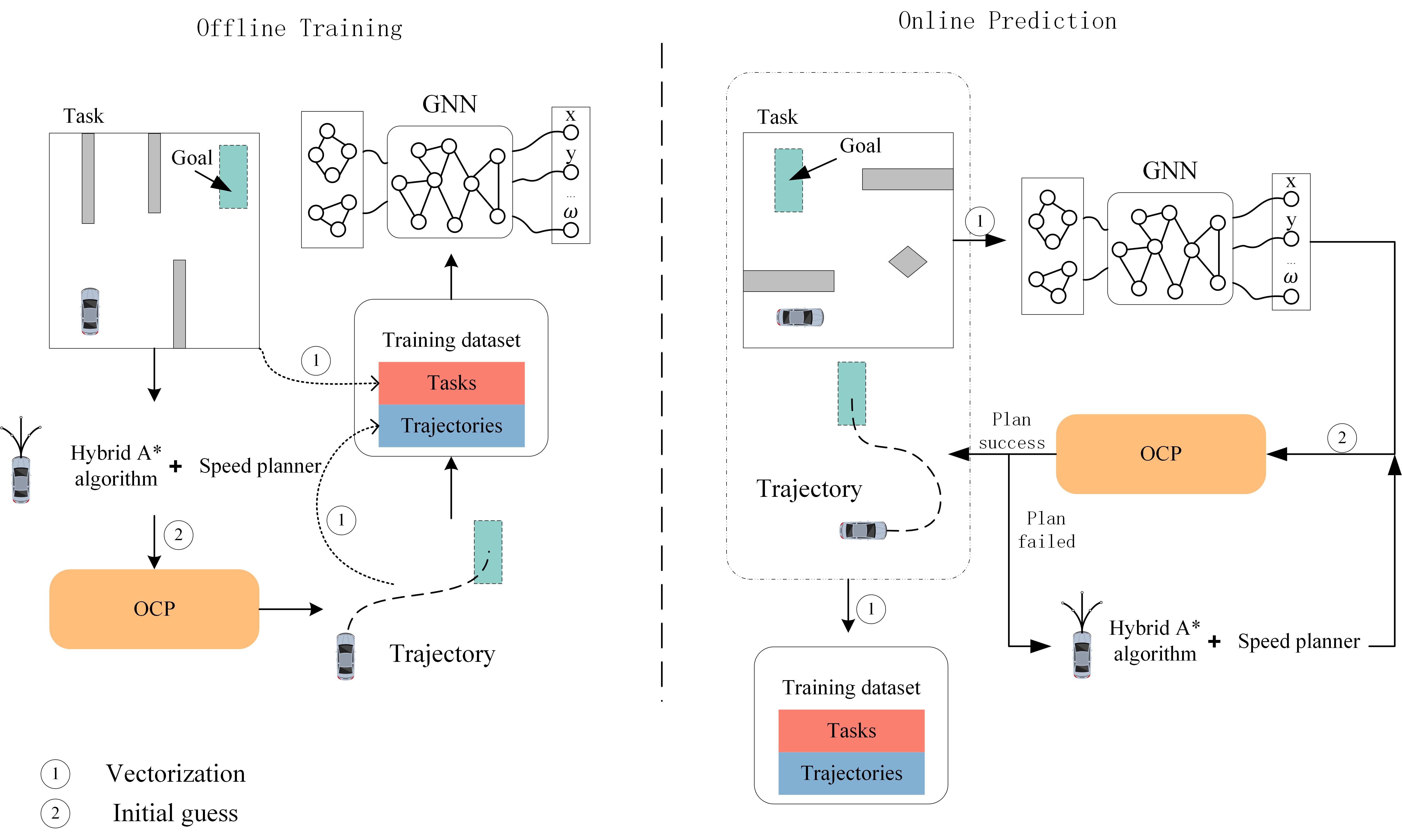
In unstructured environments, obstacles are diverse and lack lane markings, making trajectory planning for intelligent vehicles a challenging task. Traditional trajectory planning methods typically involve multiple stages, including path planning, speed planning, and trajectory optimization. These methods require the manual design of numerous parameters for each stage, resulting in significant workload and computational burden. While end-to-end trajectory planning methods are simple and efficient, they often fail to ensure that the trajectory meets vehicle dynamics and obstacle avoidance constraints in unstructured scenarios. Therefore, this paper proposes a novel trajectory planning method based on Graph Neural Networks (GNN) and numerical optimization. The proposed method consists of two stages: (1) initial trajectory prediction using the GNN, (2) trajectory optimization using numerical optimization. First, the graph neural network processes the environment information and predicts a rough trajectory, replacing traditional path and speed planning. This predicted trajectory serves as the initial solution for the numerical optimization stage, which optimizes the trajectory to ensure compliance with vehicle dynamics and obstacle avoidance constraints. We conducted simulation experiments to validate the feasibility of the proposed algorithm and compared it with other mainstream planning algorithms. The results demonstrate that the proposed method simplifies the trajectory planning process and significantly improves planning efficiency.
Create account to get full access
Overview
- This paper presents a novel approach for trajectory planning in autonomous driving scenarios, using a combination of graph neural networks (GNNs) and numerical optimization.
- The proposed method aims to enable autonomous vehicles to navigate unstructured environments, such as construction sites or off-road terrain, where traditional planning methods may struggle.
- The authors leverage GNNs to efficiently model the complex spatial and temporal relationships in the driving environment, and then use numerical optimization to generate smooth, feasible trajectories.
Plain English Explanation
The paper describes a new way for self-driving cars to plan their movements in complex, unstructured environments. In these kinds of situations, regular planning methods can have a hard time, but the researchers have come up with a better approach.
They use a type of artificial intelligence called a graph neural network (GNN) to understand the spatial and temporal relationships in the driving scene. This allows the system to model the environment more accurately than previous methods. Then, they use numerical optimization techniques to calculate smooth, drivable trajectories for the vehicle to follow.
The key idea is to combine the powerful modeling capabilities of GNNs with the precision of numerical optimization. This allows the self-driving car to navigate through challenging, unstructured environments, like construction zones or off-road terrain, where traditional planners might struggle. By using these advanced techniques, the researchers hope to make autonomous vehicles more capable of handling a wider range of real-world driving scenarios.
Technical Explanation
The paper proposes a novel trajectory planning framework for autonomous driving in unstructured scenarios, combining graph neural networks (GNNs) and numerical optimization.
The authors first use a GNN-based model to encode the spatial and temporal relationships in the driving environment, represented as a graph. This allows the system to efficiently capture the complex, dynamic interactions between the ego-vehicle, obstacles, and other road users.
Next, the encoded graph representation is fed into a numerical optimization module, which generates smooth, collision-free trajectories for the ego-vehicle to follow. The optimization process takes into account various constraints, such as vehicle dynamics and safety considerations, to ensure the feasibility of the planned trajectory.
The authors evaluate their approach on both simulation and real-world datasets, demonstrating its effectiveness in navigating unstructured driving scenarios. Compared to baseline methods, the proposed framework shows improved trajectory quality and planning efficiency.
Critical Analysis
The paper presents a promising approach for autonomous driving in unstructured environments, leveraging the strengths of both GNNs and numerical optimization. The authors have put forth a well-designed system that addresses the limitations of traditional planning methods in handling complex, real-world driving scenarios.
One potential limitation of the approach is the reliance on accurate sensing and perception of the environment, which can be challenging in unstructured scenarios with occlusions, dynamic obstacles, and other uncertainties. The performance of the GNN-based modeling may be sensitive to the quality of the input data, and further research could explore methods to improve robustness in the face of sensor noise or incomplete information.
Additionally, the computational complexity of the numerical optimization step may pose challenges for real-time implementation, especially in high-speed or time-sensitive situations. The authors briefly mention the use of parallel computing to improve efficiency, but further investigation into optimization strategies and hardware acceleration could be beneficial.
Another area for further research is the integration of the proposed trajectory planning framework with other autonomous driving components, such as safety controllers and motion planning algorithms. Exploring these synergies could lead to a more comprehensive and robust autonomous driving system.
Conclusion
This paper presents a novel approach for trajectory planning in autonomous driving scenarios, combining the strengths of graph neural networks and numerical optimization. By effectively modeling the complex spatial and temporal relationships in the driving environment, the proposed framework is able to generate smooth, feasible trajectories that can navigate unstructured scenarios, such as construction sites or off-road terrain.
The authors' work demonstrates the potential of integrating advanced AI techniques with traditional optimization methods to address the challenges faced by autonomous vehicles in real-world driving situations. As the field of autonomous driving continues to evolve, research like this, which explores innovative solutions to complex problems, will be crucial in advancing the capabilities and safety of self-driving cars.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
An Online Spatial-Temporal Graph Trajectory Planner for Autonomous Vehicles
Jilan Samiuddin, Benoit Boulet, Di Wu
0
0
The autonomous driving industry is expected to grow by over 20 times in the coming decade and, thus, motivate researchers to delve into it. The primary focus of their research is to ensure safety, comfort, and efficiency. An autonomous vehicle has several modules responsible for one or more of the aforementioned items. Among these modules, the trajectory planner plays a pivotal role in the safety of the vehicle and the comfort of its passengers. The module is also responsible for respecting kinematic constraints and any applicable road constraints. In this paper, a novel online spatial-temporal graph trajectory planner is introduced to generate safe and comfortable trajectories. First, a spatial-temporal graph is constructed using the autonomous vehicle, its surrounding vehicles, and virtual nodes along the road with respect to the vehicle itself. Next, the graph is forwarded into a sequential network to obtain the desired states. To support the planner, a simple behavioral layer is also presented that determines kinematic constraints for the planner. Furthermore, a novel potential function is also proposed to train the network. Finally, the proposed planner is tested on three different complex driving tasks, and the performance is compared with two frequently used methods. The results show that the proposed planner generates safe and feasible trajectories while achieving similar or longer distances in the forward direction and comparable comfort ride.
4/19/2024

Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
0
0
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
6/6/2024
🛠️
Learning to Plan Maneuverable and Agile Flight Trajectory with Optimization Embedded Networks
Zhichao Han, Long Xu, Fei Gao
0
0
In recent times, an increasing number of researchers have been devoted to utilizing deep neural networks for end-to-end flight navigation. This approach has gained traction due to its ability to bridge the gap between perception and planning that exists in traditional methods, thereby eliminating delays between modules. However, the practice of replacing original modules with neural networks in a black-box manner diminishes the overall system's robustness and stability. It lacks principled explanations and often fails to consistently generate high-quality motion trajectories. Furthermore, such methods often struggle to rigorously account for the robot's kinematic constraints, resulting in the generation of trajectories that cannot be executed satisfactorily. In this work, we combine the advantages of traditional methods and neural networks by proposing an optimization-embedded neural network. This network can learn high-quality trajectories directly from visual inputs without the need of mapping, while ensuring dynamic feasibility. Here, the deep neural network is employed to directly extract environment safety regions from depth images. Subsequently, we employ a model-based approach to represent these regions as safety constraints in trajectory optimization. Leveraging the availability of highly efficient optimization algorithms, our method robustly converges to feasible and optimal solutions that satisfy various user-defined constraints. Moreover, we differentiate the optimization process, allowing it to be trained as a layer within the neural network. This approach facilitates the direct interaction between perception and planning, enabling the network to focus more on the spatial regions where optimal solutions exist. As a result, it further enhances the quality and stability of the generated trajectories.
6/10/2024
🤖
Enhance Planning with Physics-informed Safety Controllor for End-to-end Autonomous Driving
Hang Zhou, Haichao Liu, Hongliang Lu, Dan Xu, Jun Ma, Yiding Ji
0
0
Recent years have seen a growing research interest in applications of Deep Neural Networks (DNN) on autonomous vehicle technology. The trend started with perception and prediction a few years ago and it is gradually being applied to motion planning tasks. Despite the performance of networks improve over time, DNN planners inherit the natural drawbacks of Deep Learning. Learning-based planners have limitations in achieving perfect accuracy on the training dataset and network performance can be affected by out-of-distribution problem. In this paper, we propose FusionAssurance, a novel trajectory-based end-to-end driving fusion framework which combines physics-informed control for safety assurance. By incorporating Potential Field into Model Predictive Control, FusionAssurance is capable of navigating through scenarios that are not included in the training dataset and scenarios where neural network fail to generalize. The effectiveness of the approach is demonstrated by extensive experiments under various scenarios on the CARLA benchmark.
5/7/2024