Play Everywhere: A Temporal Logic based Game Environment Independent Approach for Playing Soccer with Robots

0
🔄
Sign in to get full access
Overview
- Robots playing soccer often struggle to adapt their behaviors when the game environment changes, relying on hard-coded behaviors.
- This paper proposes a temporal logic-based approach that allows robots' behaviors and goals to adapt to the semantics of the environment.
- The approach uses a hierarchical representation of soccer, where the robot selects the level of operation based on the perceived semantic characteristics of the environment, dynamically modifying the set of rules and goals to apply.
- This enables the robot to operate in unstructured environments, similar to how humans adapt when playing soccer on an official field versus a street.
Plain English Explanation
The paper describes a new way for robots playing soccer to adjust their behaviors and goals as the game environment changes. Traditional robot soccer systems often have pre-programmed behaviors that don't work well when the environment is different from what they were designed for, like playing on a street instead of an official field.
The proposed approach uses a hierarchical system that allows the robot to understand the semantic characteristics of the environment and dynamically adjust its rules and goals. This means the robot can adapt its strategy and actions, similar to how humans change how they play soccer when the playing field changes.
By using this adaptive, semantics-aware approach, the robot can operate effectively in unstructured environments, just as humans can switch between playing soccer on a formal pitch and playing a pickup game on the street.
Technical Explanation
The paper presents a temporal logic-based approach to enable robots playing soccer to adapt their behaviors and goals based on the semantics of the environment. This is achieved through a hierarchical representation of the soccer game, where the robot selects the appropriate level of operation based on its perception of the semantic characteristics of the environment.
At the higher levels of the hierarchy, the robot considers broader, more abstract features of the environment, such as whether it is an official soccer field or a more unstructured setting. Based on this assessment, the robot dynamically modifies the set of rules and goals it will apply, transitioning between different foundational policies as needed.
This allows the robot to operate effectively in a range of environments, from the structured setting of an official soccer field to more unstructured indoor or outdoor settings. The paper demonstrates the effectiveness of this approach through three different use cases in varying scenarios.
Critical Analysis
The paper presents a promising approach to enable robots to adapt their soccer behaviors to different environments. By using a hierarchical, semantics-aware system, the robot can dynamically modify its rules and goals, which is a significant advancement over hard-coded behaviors.
However, the paper does not fully address the challenge of how the robot accurately perceives and classifies the semantic characteristics of the environment. This perception and understanding is crucial for the robot to select the appropriate level of operation and adapt its behaviors accordingly. Further research may be needed to ensure the robot's environmental perception is robust and reliable.
Additionally, the paper focuses on soccer as the application domain, but the proposed approach could potentially be extended to other robotic tasks that require adaptation to varying environments and contexts. Exploring the generalizability of this approach to other domains could be an interesting area for future work.
Conclusion
This paper introduces a novel temporal logic-based approach that enables robots playing soccer to adapt their behaviors and goals to the semantics of the environment. By using a hierarchical representation and dynamically adjusting their rules and objectives, the robots can operate effectively in a range of structured and unstructured settings, much like how humans adapt their soccer play to different contexts.
This research represents a significant step forward in creating more versatile and adaptable robot soccer systems, with the potential for broader applications in other domains that require environmental awareness and context-sensitive decision-making. As the field of robotics continues to advance, approaches like the one presented in this paper will be crucial for developing robots that can seamlessly navigate and thrive in a wide variety of real-world scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔄
0
Play Everywhere: A Temporal Logic based Game Environment Independent Approach for Playing Soccer with Robots
Vincenzo Suriani, Emanuele Musumeci, Daniele Nardi, Domenico Daniele Bloisi
Robots playing soccer often rely on hard-coded behaviors that struggle to generalize when the game environment change. In this paper, we propose a temporal logic based approach that allows robots' behaviors and goals to adapt to the semantics of the environment. In particular, we present a hierarchical representation of soccer in which the robot selects the level of operation based on the perceived semantic characteristics of the environment, thus modifying dynamically the set of rules and goals to apply. The proposed approach enables the robot to operate in unstructured environments, just as it happens when humans go from soccer played on an official field to soccer played on a street. Three different use cases set in different scenarios are presented to demonstrate the effectiveness of the proposed approach.
Read more5/22/2024

0
LLCoach: Generating Robot Soccer Plans using Multi-Role Large Language Models
Michele Brienza, Emanuele Musumeci, Vincenzo Suriani, Daniele Affinita, Andrea Pennisi, Daniele Nardi, Domenico Daniele Bloisi
The deployment of robots into human scenarios necessitates advanced planning strategies, particularly when we ask robots to operate in dynamic, unstructured environments. RoboCup offers the chance to deploy robots in one of those scenarios, a human-shaped game represented by a soccer match. In such scenarios, robots must operate using predefined behaviors that can fail in unpredictable conditions. This paper introduces a novel application of Large Language Models (LLMs) to address the challenge of generating actionable plans in such settings, specifically within the context of the RoboCup Standard Platform League (SPL) competitions where robots are required to autonomously execute soccer strategies that emerge from the interactions of individual agents. In particular, we propose a multi-role approach leveraging the capabilities of LLMs to generate and refine plans for a robotic soccer team. The potential of the proposed method is demonstrated through an experimental evaluation,carried out simulating multiple matches where robots with AI-generated plans play against robots running human-built code.
Read more6/27/2024
0
Learning Robot Soccer from Egocentric Vision with Deep Reinforcement Learning
Dhruva Tirumala, Markus Wulfmeier, Ben Moran, Sandy Huang, Jan Humplik, Guy Lever, Tuomas Haarnoja, Leonard Hasenclever, Arunkumar Byravan, Nathan Batchelor, Neil Sreendra, Kushal Patel, Marlon Gwira, Francesco Nori, Martin Riedmiller, Nicolas Heess
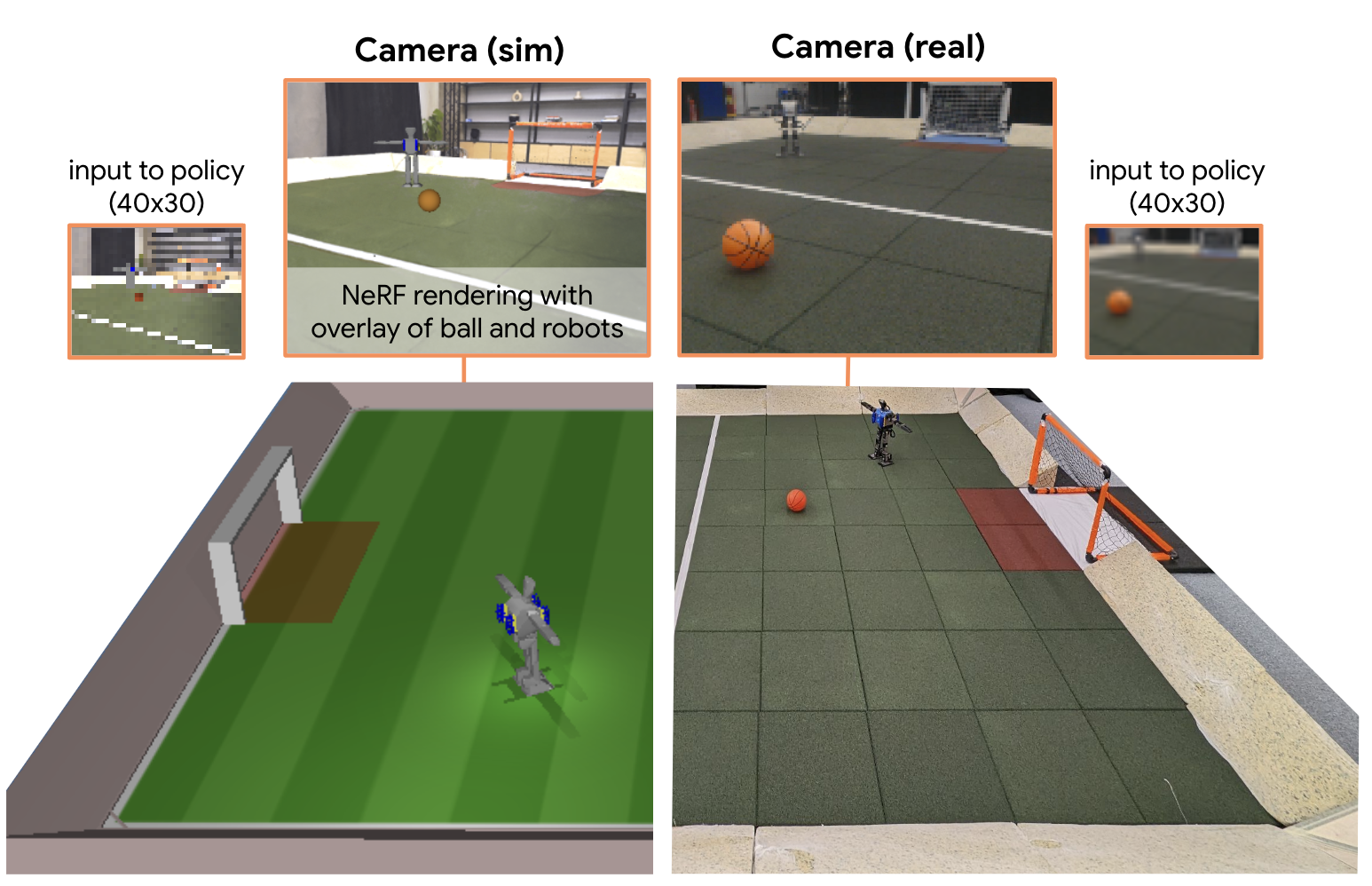
We apply multi-agent deep reinforcement learning (RL) to train end-to-end robot soccer policies with fully onboard computation and sensing via egocentric RGB vision. This setting reflects many challenges of real-world robotics, including active perception, agile full-body control, and long-horizon planning in a dynamic, partially-observable, multi-agent domain. We rely on large-scale, simulation-based data generation to obtain complex behaviors from egocentric vision which can be successfully transferred to physical robots using low-cost sensors. To achieve adequate visual realism, our simulation combines rigid-body physics with learned, realistic rendering via multiple Neural Radiance Fields (NeRFs). We combine teacher-based multi-agent RL and cross-experiment data reuse to enable the discovery of sophisticated soccer strategies. We analyze active-perception behaviors including object tracking and ball seeking that emerge when simply optimizing perception-agnostic soccer play. The agents display equivalent levels of performance and agility as policies with access to privileged, ground-truth state. To our knowledge, this paper constitutes a first demonstration of end-to-end training for multi-agent robot soccer, mapping raw pixel observations to joint-level actions, that can be deployed in the real world. Videos of the game-play and analyses can be seen on our website https://sites.google.com/view/vision-soccer .
Read more5/7/2024
🤿
9
Learning Agile Soccer Skills for a Bipedal Robot with Deep Reinforcement Learning
Tuomas Haarnoja, Ben Moran, Guy Lever, Sandy H. Huang, Dhruva Tirumala, Jan Humplik, Markus Wulfmeier, Saran Tunyasuvunakool, Noah Y. Siegel, Roland Hafner, Michael Bloesch, Kristian Hartikainen, Arunkumar Byravan, Leonard Hasenclever, Yuval Tassa, Fereshteh Sadeghi, Nathan Batchelor, Federico Casarini, Stefano Saliceti, Charles Game, Neil Sreendra, Kushal Patel, Marlon Gwira, Andrea Huber, Nicole Hurley, Francesco Nori, Raia Hadsell, Nicolas Heess
We investigate whether Deep Reinforcement Learning (Deep RL) is able to synthesize sophisticated and safe movement skills for a low-cost, miniature humanoid robot that can be composed into complex behavioral strategies in dynamic environments. We used Deep RL to train a humanoid robot with 20 actuated joints to play a simplified one-versus-one (1v1) soccer game. The resulting agent exhibits robust and dynamic movement skills such as rapid fall recovery, walking, turning, kicking and more; and it transitions between them in a smooth, stable, and efficient manner. The agent's locomotion and tactical behavior adapts to specific game contexts in a way that would be impractical to manually design. The agent also developed a basic strategic understanding of the game, and learned, for instance, to anticipate ball movements and to block opponent shots. Our agent was trained in simulation and transferred to real robots zero-shot. We found that a combination of sufficiently high-frequency control, targeted dynamics randomization, and perturbations during training in simulation enabled good-quality transfer. Although the robots are inherently fragile, basic regularization of the behavior during training led the robots to learn safe and effective movements while still performing in a dynamic and agile way -- well beyond what is intuitively expected from the robot. Indeed, in experiments, they walked 181% faster, turned 302% faster, took 63% less time to get up, and kicked a ball 34% faster than a scripted baseline, while efficiently combining the skills to achieve the longer term objectives.
Read more4/12/2024