PointAD: Comprehending 3D Anomalies from Points and Pixels for Zero-shot 3D Anomaly Detection

0

Sign in to get full access
Overview
- PointAD is a zero-shot 3D anomaly detection method that uses both point clouds and images to identify anomalies in 3D data.
- It combines a point cloud encoder and an image encoder to learn a joint representation, which is used to detect anomalies.
- PointAD can detect anomalies without requiring any labeled anomaly data, making it useful for real-world applications.
Plain English Explanation
PointAD is a new method for detecting unusual or irregular objects in 3D data, such as point clouds from 3D sensors. Unlike previous approaches, PointAD does not require any examples of known anomalies to train the detection model.
Instead, PointAD uses a joint representation that combines information from both the 3D point cloud data and 2D images of the same scene. It learns this joint representation in a zero-shot manner, without needing any labeled anomaly examples.
The key insight is that by learning a shared understanding of the normal 3D structure and appearance of objects from general data, PointAD can then identify when new 3D observations deviate significantly from this learned "normal" model. This allows it to detect anomalies in a completely unsupervised way.
The advantage of this approach is that it can be applied to a wide variety of 3D data scenarios without requiring the collection and labeling of rare or unusual examples, which is often impractical. PointAD could enable more robust and widely applicable 3D anomaly detection for applications like autonomous vehicles, industrial inspection, and security monitoring.
Technical Explanation
The PointAD model consists of two key components:
-
Point Cloud Encoder: This takes a 3D point cloud as input and learns a compact representation that captures the normal 3D structure of the observed scene.
-
Image Encoder: This takes a 2D image of the same scene and learns a complementary representation that captures the normal appearance of the objects.
These two encoders are trained jointly on large datasets of general 3D and 2D data, allowing them to learn a shared latent space that represents the common "normal" patterns across both modalities.
At inference time, PointAD takes a new 3D point cloud and its corresponding 2D image. It passes them through the trained encoders to obtain their latent representations. It then measures the distance between these two representations - the larger the distance, the more the new observation deviates from the learned "normal" patterns, and the more likely it is to be an anomaly.
The key innovation of PointAD is its ability to detect anomalies in a zero-shot manner, without requiring any labeled examples of anomalies during training. This makes it much more practical for real-world applications compared to previous 3D anomaly detection methods.
Critical Analysis
The PointAD paper makes a compelling case for its zero-shot 3D anomaly detection approach. By leveraging both 3D point clouds and 2D images, it can learn a more robust and generalizable representation of normal object structure and appearance.
However, the paper acknowledges that PointAD may struggle to detect anomalies that are semantically meaningful but geometrically normal, such as a chair with an unusual color or texture. Since PointAD focuses primarily on geometric and visual features, it may miss more subtle semantic anomalies.
Additionally, the paper does not provide much insight into the failure modes or edge cases of PointAD. It would be helpful to understand the types of anomalies that the method struggles to detect, as well as any biases or blind spots in the learned representations.
Further research could also explore ways to incorporate semantic understanding into the PointAD framework, perhaps by combining it with language models or other high-level reasoning capabilities. This could enhance its ability to detect a wider range of anomalies, including those that are more conceptual in nature.
Conclusion
PointAD represents an important advance in 3D anomaly detection by enabling zero-shot, unsupervised identification of unusual objects or scenes. By learning a joint representation from both 3D point clouds and 2D images, it can detect anomalies without requiring any labeled examples during training.
This capability could have significant real-world impact, as it eliminates the need to collect and label rare or unusual data, which is often impractical. PointAD could enable more robust and flexible anomaly detection for applications like autonomous vehicles, industrial inspection, and surveillance.
While PointAD has some limitations in detecting semantic anomalies, the core ideas behind the method are promising and could inspire further research into leveraging multimodal data for anomaly detection. As 3D sensing continues to advance, techniques like PointAD will become increasingly valuable for making sense of complex 3D environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!PointAD: Comprehending 3D Anomalies from Points and Pixels for Zero-shot 3D Anomaly Detection
Qihang Zhou, Jiangtao Yan, Shibo He, Wenchao Meng, Jiming Chen
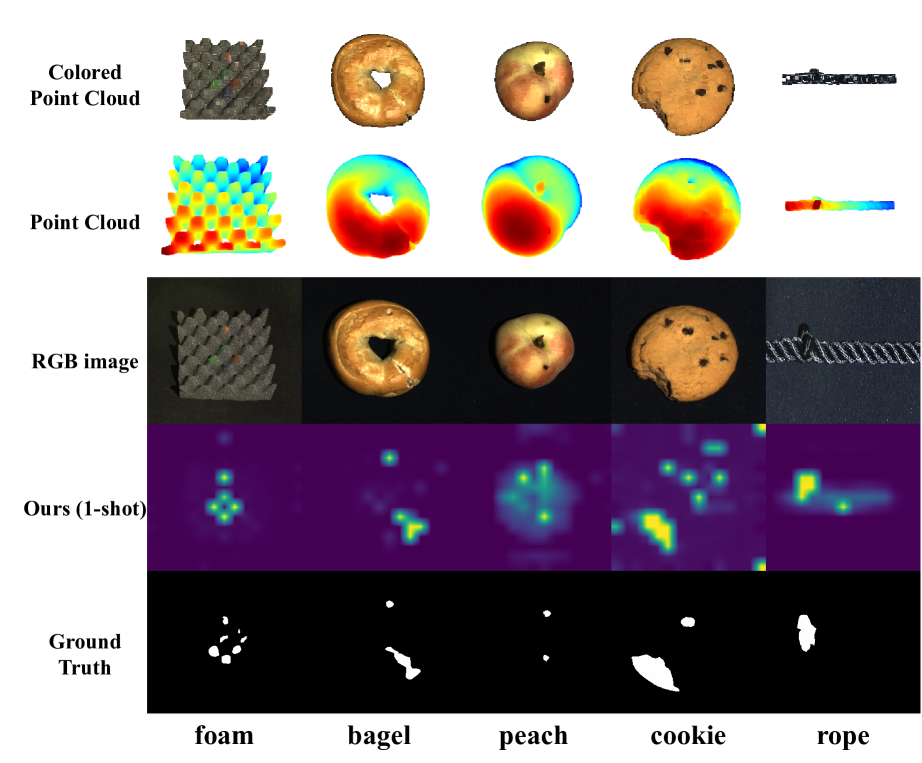
Zero-shot (ZS) 3D anomaly detection is a crucial yet unexplored field that addresses scenarios where target 3D training samples are unavailable due to practical concerns like privacy protection. This paper introduces PointAD, a novel approach that transfers the strong generalization capabilities of CLIP for recognizing 3D anomalies on unseen objects. PointAD provides a unified framework to comprehend 3D anomalies from both points and pixels. In this framework, PointAD renders 3D anomalies into multiple 2D renderings and projects them back into 3D space. To capture the generic anomaly semantics into PointAD, we propose hybrid representation learning that optimizes the learnable text prompts from 3D and 2D through auxiliary point clouds. The collaboration optimization between point and pixel representations jointly facilitates our model to grasp underlying 3D anomaly patterns, contributing to detecting and segmenting anomalies of unseen diverse 3D objects. Through the alignment of 3D and 2D space, our model can directly integrate RGB information, further enhancing the understanding of 3D anomalies in a plug-and-play manner. Extensive experiments show the superiority of PointAD in ZS 3D anomaly detection across diverse unseen objects.
Read more10/2/2024
0
CLIP3D-AD: Extending CLIP for 3D Few-Shot Anomaly Detection with Multi-View Images Generation
Zuo Zuo, Jiahao Dong, Yao Wu, Yanyun Qu, Zongze Wu
Few-shot anomaly detection methods can effectively address data collecting difficulty in industrial scenarios. Compared to 2D few-shot anomaly detection (2D-FSAD), 3D few-shot anomaly detection (3D-FSAD) is still an unexplored but essential task. In this paper, we propose CLIP3D-AD, an efficient 3D-FSAD method extended on CLIP. We successfully transfer strong generalization ability of CLIP into 3D-FSAD. Specifically, we synthesize anomalous images on given normal images as sample pairs to adapt CLIP for 3D anomaly classification and segmentation. For classification, we introduce an image adapter and a text adapter to fine-tune global visual features and text features. Meanwhile, we propose a coarse-to-fine decoder to fuse and facilitate intermediate multi-layer visual representations of CLIP. To benefit from geometry information of point cloud and eliminate modality and data discrepancy when processed by CLIP, we project and render point cloud to multi-view normal and anomalous images. Then we design multi-view fusion module to fuse features of multi-view images extracted by CLIP which are used to facilitate visual representations for further enhancing vision-language correlation. Extensive experiments demonstrate that our method has a competitive performance of 3D few-shot anomaly classification and segmentation on MVTec-3D AD dataset.
Read more6/28/2024

0
Towards Zero-shot Point Cloud Anomaly Detection: A Multi-View Projection Framework
Yuqi Cheng, Yunkang Cao, Guoyang Xie, Zhichao Lu, Weiming Shen
Detecting anomalies within point clouds is crucial for various industrial applications, but traditional unsupervised methods face challenges due to data acquisition costs, early-stage production constraints, and limited generalization across product categories. To overcome these challenges, we introduce the Multi-View Projection (MVP) framework, leveraging pre-trained Vision-Language Models (VLMs) to detect anomalies. Specifically, MVP projects point cloud data into multi-view depth images, thereby translating point cloud anomaly detection into image anomaly detection. Following zero-shot image anomaly detection methods, pre-trained VLMs are utilized to detect anomalies on these depth images. Given that pre-trained VLMs are not inherently tailored for zero-shot point cloud anomaly detection and may lack specificity, we propose the integration of learnable visual and adaptive text prompting techniques to fine-tune these VLMs, thereby enhancing their detection performance. Extensive experiments on the MVTec 3D-AD and Real3D-AD demonstrate our proposed MVP framework's superior zero-shot anomaly detection performance and the prompting techniques' effectiveness. Real-world evaluations on automotive plastic part inspection further showcase that the proposed method can also be generalized to practical unseen scenarios. The code is available at https://github.com/hustCYQ/MVP-PCLIP.
Read more9/23/2024

0
R3D-AD: Reconstruction via Diffusion for 3D Anomaly Detection
Zheyuan Zhou, Le Wang, Naiyu Fang, Zili Wang, Lemiao Qiu, Shuyou Zhang
3D anomaly detection plays a crucial role in monitoring parts for localized inherent defects in precision manufacturing. Embedding-based and reconstruction-based approaches are among the most popular and successful methods. However, there are two major challenges to the practical application of the current approaches: 1) the embedded models suffer the prohibitive computational and storage due to the memory bank structure; 2) the reconstructive models based on the MAE mechanism fail to detect anomalies in the unmasked regions. In this paper, we propose R3D-AD, reconstructing anomalous point clouds by diffusion model for precise 3D anomaly detection. Our approach capitalizes on the data distribution conversion of the diffusion process to entirely obscure the input's anomalous geometry. It step-wisely learns a strict point-level displacement behavior, which methodically corrects the aberrant points. To increase the generalization of the model, we further present a novel 3D anomaly simulation strategy named Patch-Gen to generate realistic and diverse defect shapes, which narrows the domain gap between training and testing. Our R3D-AD ensures a uniform spatial transformation, which allows straightforwardly generating anomaly results by distance comparison. Extensive experiments show that our R3D-AD outperforms previous state-of-the-art methods, achieving 73.4% Image-level AUROC on the Real3D-AD dataset and 74.9% Image-level AUROC on the Anomaly-ShapeNet dataset with an exceptional efficiency.
Read more7/16/2024