POLICEd RL: Learning Closed-Loop Robot Control Policies with Provable Satisfaction of Hard Constraints
2403.13297
0
0

Abstract
In this paper, we seek to learn a robot policy guaranteed to satisfy state constraints. To encourage constraint satisfaction, existing RL algorithms typically rely on Constrained Markov Decision Processes and discourage constraint violations through reward shaping. However, such soft constraints cannot offer verifiable safety guarantees. To address this gap, we propose POLICEd RL, a novel RL algorithm explicitly designed to enforce affine hard constraints in closed-loop with a black-box environment. Our key insight is to force the learned policy to be affine around the unsafe set and use this affine region as a repulsive buffer to prevent trajectories from violating the constraint. We prove that such policies exist and guarantee constraint satisfaction. Our proposed framework is applicable to both systems with continuous and discrete state and action spaces and is agnostic to the choice of the RL training algorithm. Our results demonstrate the capacity of POLICEd RL to enforce hard constraints in robotic tasks while significantly outperforming existing methods.
Create account to get full access
Overview
• This paper presents POLICEd RL, a novel approach for learning closed-loop robot control policies that provably satisfy hard constraints. • The researchers develop a method that can learn policies that are guaranteed to meet specific requirements, such as safety or performance constraints, even in the presence of model mismatch. • The paper builds on prior work in constrained reinforcement learning under model mismatch, safe reinforcement learning using constraint manifold theory, and constraint-conditioned policy optimization.
Plain English Explanation
The researchers have developed a new way for robots to learn control policies that are guaranteed to meet specific requirements, even when the robot's understanding of its environment is imperfect. This is important because real-world robotic systems often have to operate in complex, uncertain environments where it's critical that they behave safely and reliably.
The key idea behind POLICEd RL is to explicitly incorporate hard constraints, such as safety limits or performance targets, directly into the robot's learning process. Rather than just trying to optimize for a general reward signal, the robot also learns to satisfy these constraints. This ensures that the final control policy will provably meet the specified requirements, even if the robot's model of the world is not perfectly accurate.
The researchers demonstrate that POLICEd RL can be applied to a variety of robotic control tasks, from navigating through cluttered environments to manipulating objects. By incorporating these hard constraints into the learning process, the robot can develop policies that are both effective and trustworthy, making them suitable for real-world deployment.
Technical Explanation
The paper introduces a novel reinforcement learning (RL) framework called POLICEd RL (Provably Optimal Learning of Integrated Closed-loop Execution with hard constraints) that can learn robot control policies that provably satisfy hard constraints, even in the presence of model mismatch.
The key innovation of POLICEd RL is the integration of hard constraints directly into the RL objective function. Rather than just optimizing for a general reward signal, the robot also learns to satisfy specific requirements, such as safety limits or performance targets. This is achieved through the use of constraint-conditioned policy optimization, which allows the policy to be conditioned on the constraint satisfaction.
To handle model mismatch, the researchers leverage techniques from safe reinforcement learning using constraint manifold theory and deterministic policies for constrained RL. This ensures that the learned policies will satisfy the hard constraints even when the robot's model of the environment is not perfectly accurate.
The paper presents extensive experimental evaluations of POLICEd RL on a range of simulated robotics tasks, including navigation, object manipulation, and quadrotor control. The results demonstrate that POLICEd RL can learn control policies that reliably satisfy hard constraints while also achieving high performance, outperforming alternative approaches that do not explicitly account for constraint satisfaction.
Critical Analysis
The paper provides a compelling solution to the challenge of learning robot control policies that can provably satisfy hard constraints, even in the presence of model mismatch. The key strengths of the POLICEd RL approach are its ability to directly incorporate constraint satisfaction into the learning objective and its robustness to inaccuracies in the robot's internal model of the environment.
One potential limitation of the approach is that it may be computationally more expensive than simpler RL methods that do not explicitly handle hard constraints. The researchers acknowledge this tradeoff and suggest that future work could explore ways to improve the scalability and efficiency of the POLICEd RL algorithm.
Additionally, while the paper demonstrates the effectiveness of POLICEd RL on a range of simulated tasks, it would be valuable to see how the approach performs on real-world robotic systems, where the challenges of model mismatch and constraint satisfaction are even more pronounced.
Overall, the POLICEd RL framework represents an important step forward in the field of safe and reliable reinforcement learning for robotics, and the insights and techniques presented in this paper could have far-reaching implications for the development of trustworthy autonomous systems.
Conclusion
The POLICEd RL framework developed in this paper provides a novel approach for learning robot control policies that can provably satisfy hard constraints, even in the presence of model mismatch. By integrating constraint satisfaction directly into the reinforcement learning objective, the researchers have created a method that can produce control policies that are both effective and reliable, making them well-suited for real-world robotic applications.
The key innovations of POLICEd RL, including the use of constraint-conditioned policy optimization and techniques from safe reinforcement learning, represent important advancements in the field of autonomous systems. As robots continue to take on increasingly complex and safety-critical tasks, the ability to develop control policies that are guaranteed to meet specific requirements will become increasingly important.
While the paper demonstrates the effectiveness of POLICEd RL in simulation, further research is needed to understand how the approach would perform in real-world robotic systems. Nevertheless, the insights and techniques presented in this work provide a valuable foundation for the development of more trustworthy and capable autonomous systems in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Constrained Reinforcement Learning Under Model Mismatch
Zhongchang Sun, Sihong He, Fei Miao, Shaofeng Zou
0
0
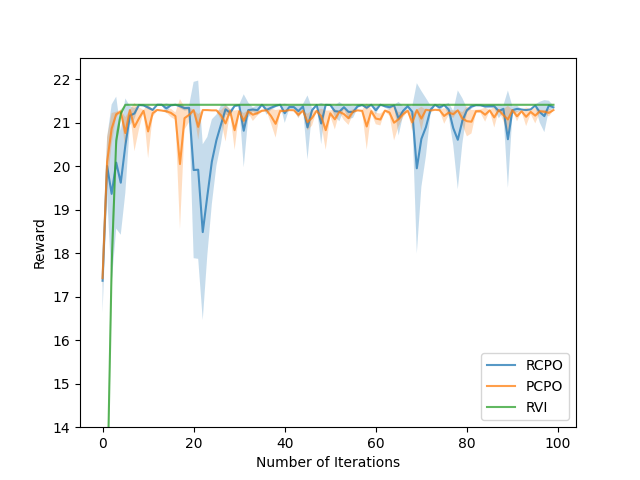
Existing studies on constrained reinforcement learning (RL) may obtain a well-performing policy in the training environment. However, when deployed in a real environment, it may easily violate constraints that were originally satisfied during training because there might be model mismatch between the training and real environments. To address the above challenge, we formulate the problem as constrained RL under model uncertainty, where the goal is to learn a good policy that optimizes the reward and at the same time satisfy the constraint under model mismatch. We develop a Robust Constrained Policy Optimization (RCPO) algorithm, which is the first algorithm that applies to large/continuous state space and has theoretical guarantees on worst-case reward improvement and constraint violation at each iteration during the training. We demonstrate the effectiveness of our algorithm on a set of RL tasks with constraints.
5/6/2024
Safe Reinforcement Learning on the Constraint Manifold: Theory and Applications
Puze Liu, Haitham Bou-Ammar, Jan Peters, Davide Tateo
0
0
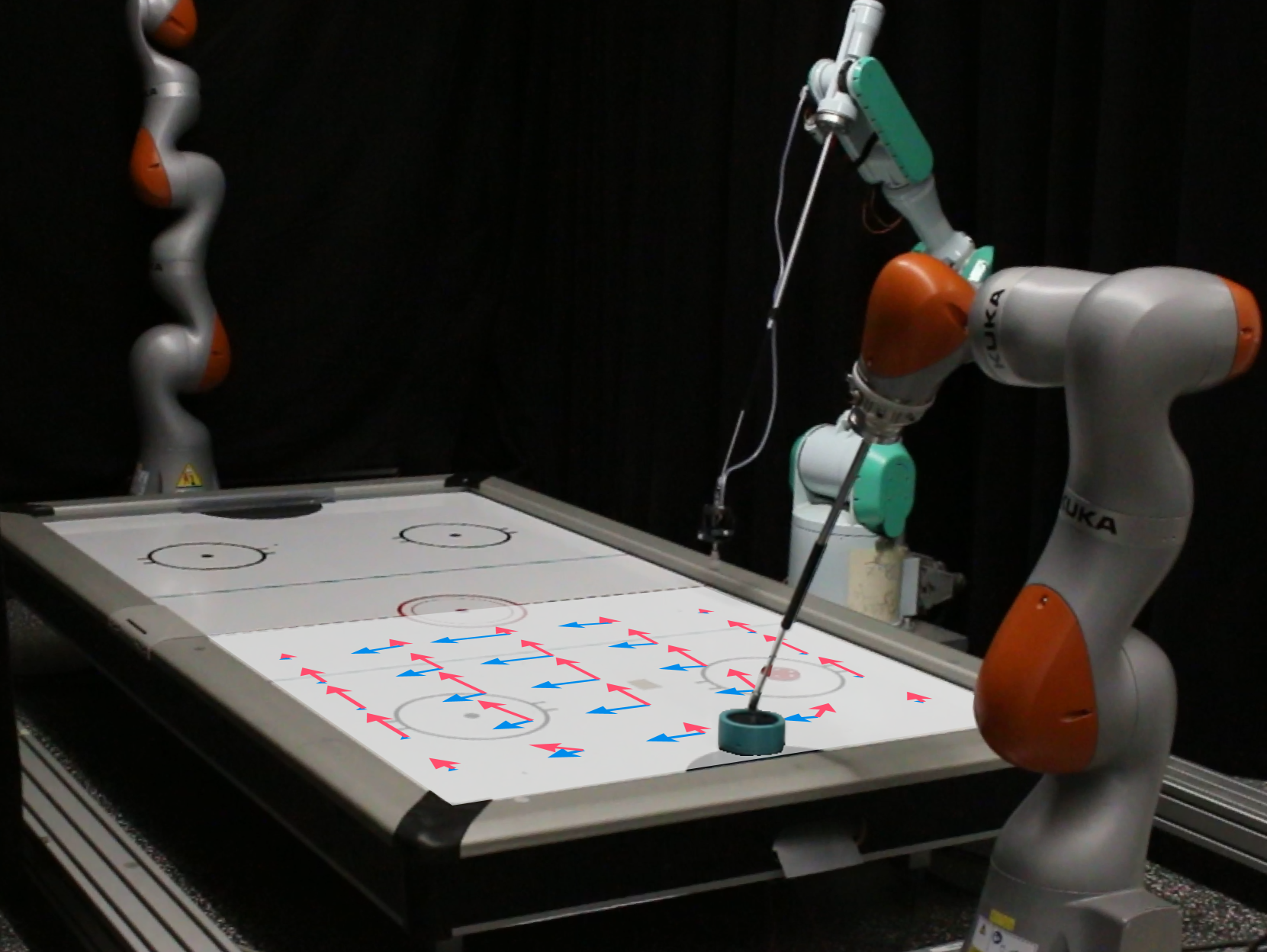
Integrating learning-based techniques, especially reinforcement learning, into robotics is promising for solving complex problems in unstructured environments. However, most existing approaches are trained in well-tuned simulators and subsequently deployed on real robots without online fine-tuning. In this setting, the simulation's realism seriously impacts the deployment's success rate. Instead, learning with real-world interaction data offers a promising alternative: not only eliminates the need for a fine-tuned simulator but also applies to a broader range of tasks where accurate modeling is unfeasible. One major problem for on-robot reinforcement learning is ensuring safety, as uncontrolled exploration can cause catastrophic damage to the robot or the environment. Indeed, safety specifications, often represented as constraints, can be complex and non-linear, making safety challenging to guarantee in learning systems. In this paper, we show how we can impose complex safety constraints on learning-based robotics systems in a principled manner, both from theoretical and practical points of view. Our approach is based on the concept of the Constraint Manifold, representing the set of safe robot configurations. Exploiting differential geometry techniques, i.e., the tangent space, we can construct a safe action space, allowing learning agents to sample arbitrary actions while ensuring safety. We demonstrate the method's effectiveness in a real-world Robot Air Hockey task, showing that our method can handle high-dimensional tasks with complex constraints. Videos of the real robot experiments are available on the project website (https://puzeliu.github.io/TRO-ATACOM).
4/16/2024
🛠️
Constraint-Conditioned Policy Optimization for Versatile Safe Reinforcement Learning
Yihang Yao, Zuxin Liu, Zhepeng Cen, Jiacheng Zhu, Wenhao Yu, Tingnan Zhang, Ding Zhao
0
0
Safe reinforcement learning (RL) focuses on training reward-maximizing agents subject to pre-defined safety constraints. Yet, learning versatile safe policies that can adapt to varying safety constraint requirements during deployment without retraining remains a largely unexplored and challenging area. In this work, we formulate the versatile safe RL problem and consider two primary requirements: training efficiency and zero-shot adaptation capability. To address them, we introduce the Conditioned Constrained Policy Optimization (CCPO) framework, consisting of two key modules: (1) Versatile Value Estimation (VVE) for approximating value functions under unseen threshold conditions, and (2) Conditioned Variational Inference (CVI) for encoding arbitrary constraint thresholds during policy optimization. Our extensive experiments demonstrate that CCPO outperforms the baselines in terms of safety and task performance while preserving zero-shot adaptation capabilities to different constraint thresholds data-efficiently. This makes our approach suitable for real-world dynamic applications.
5/1/2024
🏅
Deterministic Policies for Constrained Reinforcement Learning in Polynomial-Time
Jeremy McMahan
0
0
We present a novel algorithm that efficiently computes near-optimal deterministic policies for constrained reinforcement learning (CRL) problems. Our approach combines three key ideas: (1) value-demand augmentation, (2) action-space approximate dynamic programming, and (3) time-space rounding. Under mild reward assumptions, our algorithm constitutes a fully polynomial-time approximation scheme (FPTAS) for a diverse class of cost criteria. This class requires that the cost of a policy can be computed recursively over both time and (state) space, which includes classical expectation, almost sure, and anytime constraints. Our work not only provides provably efficient algorithms to address real-world challenges in decision-making but also offers a unifying theory for the efficient computation of constrained deterministic policies.
5/24/2024