Power Variable Projection for Initialization-Free Large-Scale Bundle Adjustment

0
💬
Sign in to get full access
Overview
- Bundle adjustment (BA) is a key problem in computer vision, used to reconstruct 3D scenes from multiple images.
- The standard Levenberg-Marquardt algorithm for solving BA generally requires a good initialization, which can be challenging.
- In contrast, the Variable Projection (VarPro) algorithm can solve BA without initialization, but has been less explored.
Plain English Explanation
The research paper introduces a new method called Power Variable Projection (PoVar) that can solve the bundle adjustment problem without needing a good initial guess.
Bundle adjustment is a crucial step in reconstructing 3D scenes from multiple camera images. It involves adjusting the camera positions and the 3D locations of objects in the scene to best fit the observed image data. The standard algorithm used for this, called Levenberg-Marquardt, generally works well but requires a good initial estimate of the scene geometry to start from.
In contrast, the Variable Projection (VarPro) algorithm has been shown to be able to solve bundle adjustment without needing a careful initialization. However, VarPro has been less extensively studied compared to Levenberg-Marquardt.
The new PoVar method builds on VarPro by using a mathematical technique called "power series expansion" to further improve its ability to solve bundle adjustment problems without initialization. This is important because it can make 3D reconstruction from multiple images more robust and practical in real-world situations where a good initial scene estimate may not be available.
Technical Explanation
The key technical contributions of this work are:
- Extending the Variable Projection (VarPro) algorithm to a new "Power Variable Projection" (PoVar) method, using a power series expansion approach.
- Linking the power series expansion used in PoVar to Riemannian manifold optimization, which is crucial for solving large-scale bundle adjustment problems without initialization.
- Experimentally demonstrating that the PoVar solver achieves state-of-the-art results in terms of speed and accuracy on the real-world BAL dataset, surpassing previous initialization-free bundle adjustment methods.
The paper shows that PoVar can effectively solve large-scale bundle adjustment problems without requiring a good initial guess of the scene geometry. This is an important advance over the standard Levenberg-Marquardt approach, which struggles with poor initializations.
Critical Analysis
The paper provides a solid technical contribution by extending the VarPro algorithm and connecting it to Riemannian manifold optimization. However, some limitations and areas for further research are worth noting:
- The experiments are limited to the BAL dataset, and further validation on a broader range of bundle adjustment problems would strengthen the claims.
- The paper does not provide detailed comparisons to other recent initialization-free approaches that may also be able to solve large-scale bundle adjustment.
- The theoretical analysis linking the power series expansion to Riemannian manifold optimization could be explored in more depth to provide further insights.
Overall, the PoVar method represents an interesting advance in solving the challenging problem of large-scale bundle adjustment without initialization. Further research and validation could help solidify its position as a state-of-the-art technique in this area.
Conclusion
This research paper introduces a new "Power Variable Projection" (PoVar) method for solving the bundle adjustment problem in computer vision without requiring a careful initialization of the scene geometry.
By building upon the Variable Projection (VarPro) algorithm and connecting it to Riemannian manifold optimization, PoVar demonstrates the ability to effectively solve large-scale bundle adjustment problems in a robust and accurate manner.
The experimental results on the real-world BAL dataset show that PoVar outperforms previous initialization-free bundle adjustment methods, opening up new possibilities for practical 3D reconstruction from multiple images without the need for a good initial scene estimate. This represents an important advance in the field of computer vision and has the potential to impact a wide range of applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
0
Power Variable Projection for Initialization-Free Large-Scale Bundle Adjustment
Simon Weber, Je Hyeong Hong, Daniel Cremers
Most Bundle Adjustment (BA) solvers like the Levenberg-Marquardt algorithm require a good initialization. Instead, initialization-free BA remains a largely uncharted territory. The under-explored Variable Projection algorithm (VarPro) exhibits a wide convergence basin even without initialization. Coupled with object space error formulation, recent works have shown its ability to solve small-scale initialization-free bundle adjustment problem. To make such initialization-free BA approaches scalable, we introduce Power Variable Projection (PoVar), extending a recent inverse expansion method based on power series. Importantly, we link the power series expansion to Riemannian manifold optimization. This projective framework is crucial to solve large-scale bundle adjustment problems without initialization. Using the real-world BAL dataset, we experimentally demonstrate that our solver achieves state-of-the-art results in terms of speed and accuracy. To our knowledge, this work is the first to address the scalability of BA without initialization opening new venues for initialization-free structure-from-motion.
Read more8/14/2024
0
From Variance to Veracity: Unbundling and Mitigating Gradient Variance in Differentiable Bundle Adjustment Layers
Swaminathan Gurumurthy, Karnik Ram, Bingqing Chen, Zachary Manchester, Zico Kolter
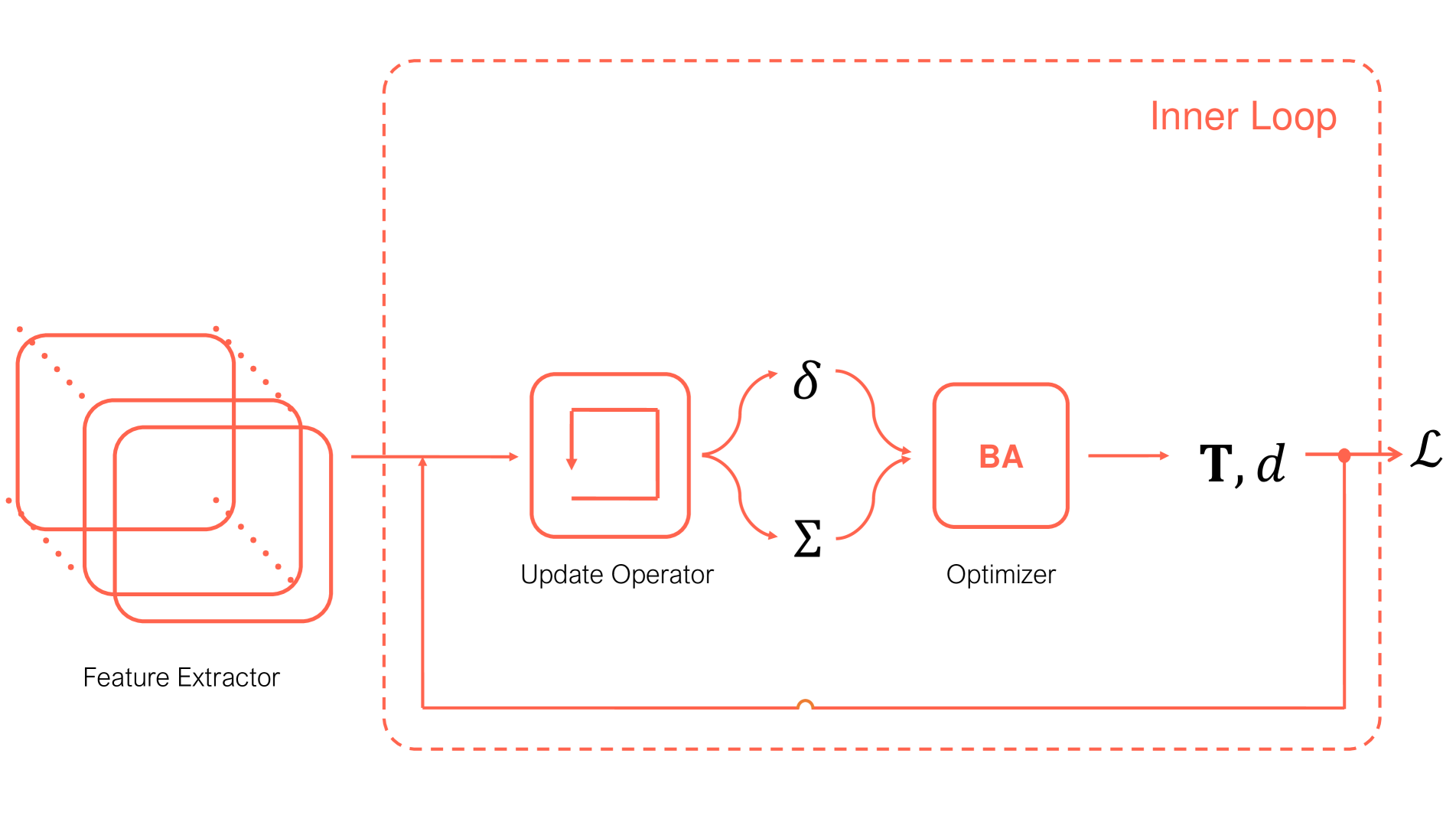
Various pose estimation and tracking problems in robotics can be decomposed into a correspondence estimation problem (often computed using a deep network) followed by a weighted least squares optimization problem to solve for the poses. Recent work has shown that coupling the two problems by iteratively refining one conditioned on the other's output yields SOTA results across domains. However, training these models has proved challenging, requiring a litany of tricks to stabilize and speed up training. In this work, we take the visual odometry problem as an example and identify three plausible causes: (1) flow loss interference, (2) linearization errors in the bundle adjustment (BA) layer, and (3) dependence of weight gradients on the BA residual. We show how these issues result in noisy and higher variance gradients, potentially leading to a slow down in training and instabilities. We then propose a simple, yet effective solution to reduce the gradient variance by using the weights predicted by the network in the inner optimization loop to weight the correspondence objective in the training problem. This helps the training objective `focus' on the more important points, thereby reducing the variance and mitigating the influence of outliers. We show that the resulting method leads to faster training and can be more flexibly trained in varying training setups without sacrificing performance. In particular we show $2$--$2.5times$ training speedups over a baseline visual odometry model we modify.
Read more6/13/2024

0
Projection-Free Variance Reduction Methods for Stochastic Constrained Multi-Level Compositional Optimization
Wei Jiang, Sifan Yang, Wenhao Yang, Yibo Wang, Yuanyu Wan, Lijun Zhang
This paper investigates projection-free algorithms for stochastic constrained multi-level optimization. In this context, the objective function is a nested composition of several smooth functions, and the decision set is closed and convex. Existing projection-free algorithms for solving this problem suffer from two limitations: 1) they solely focus on the gradient mapping criterion and fail to match the optimal sample complexities in unconstrained settings; 2) their analysis is exclusively applicable to non-convex functions, without considering convex and strongly convex objectives. To address these issues, we introduce novel projection-free variance reduction algorithms and analyze their complexities under different criteria. For gradient mapping, our complexities improve existing results and match the optimal rates for unconstrained problems. For the widely-used Frank-Wolfe gap criterion, we provide theoretical guarantees that align with those for single-level problems. Additionally, by using a stage-wise adaptation, we further obtain complexities for convex and strongly convex functions. Finally, numerical experiments on different tasks demonstrate the effectiveness of our methods.
Read more6/7/2024
🤖
0
Efficient and Consistent Bundle Adjustment on Lidar Point Clouds
Zheng Liu, Xiyuan Liu, Fu Zhang
Bundle Adjustment (BA) refers to the problem of simultaneous determination of sensor poses and scene geometry, which is a fundamental problem in robot vision. This paper presents an efficient and consistent bundle adjustment method for lidar sensors. The method employs edge and plane features to represent the scene geometry, and directly minimizes the natural Euclidean distance from each raw point to the respective geometry feature. A nice property of this formulation is that the geometry features can be analytically solved, drastically reducing the dimension of the numerical optimization. To represent and solve the resultant optimization problem more efficiently, this paper then proposes a novel concept {it point clusters}, which encodes all raw points associated to the same feature by a compact set of parameters, the {it point cluster coordinates}. We derive the closed-form derivatives, up to the second order, of the BA optimization based on the point cluster coordinates and show their theoretical properties such as the null spaces and sparsity. Based on these theoretical results, this paper develops an efficient second-order BA solver. Besides estimating the lidar poses, the solver also exploits the second order information to estimate the pose uncertainty caused by measurement noises, leading to consistent estimates of lidar poses. Moreover, thanks to the use of point cluster, the developed solver fundamentally avoids the enumeration of each raw point (which is very time-consuming due to the large number) in all steps of the optimization: cost evaluation, derivatives evaluation and uncertainty evaluation. The implementation of our method is open sourced to benefit the robotics community and beyond.
Read more6/18/2024