A practical existence theorem for reduced order models based on convolutional autoencoders

0
🎲
Sign in to get full access
Overview
- Deep learning has gained popularity in the fields of Partial Differential Equations (PDEs) and Reduced Order Modeling (ROM)
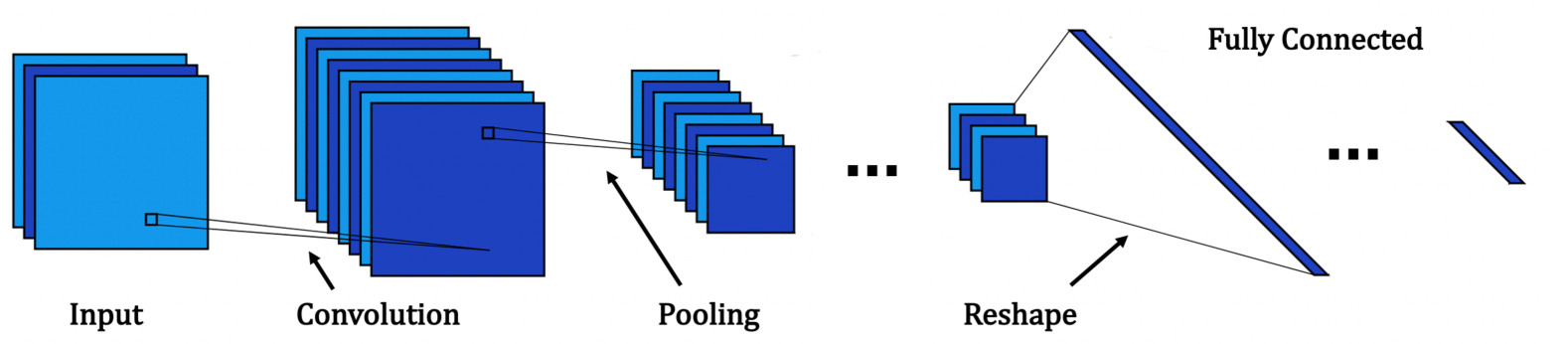
- Convolutional Neural Networks (CNNs) have proven effective as deep autoencoders, outperforming established techniques like the reduced basis method
- However, there is limited theoretical support for CNN-based autoencoders, and practical questions remain unanswered
Plain English Explanation
Deep learning, a powerful form of artificial intelligence, has been increasingly used in the fields of Partial Differential Equations (PDEs) and Reduced Order Modeling (ROM). These techniques allow researchers and engineers to build data-driven models that can solve complex mathematical problems, like simulating the flow of fluids or the behavior of materials.
One particularly effective approach is the use of Convolutional Neural Networks (CNNs) as the basis for deep autoencoders. These models are able to automatically extract and learn the key features of a problem, often outperforming traditional techniques like the reduced basis method.
Despite the success of these CNN-based autoencoders, there is limited theoretical understanding of why they work so well. While there are some general guidelines for designing these models, the process of actually learning the important features, or "latent features," is not well-understood. Additionally, there are many practical questions that remain unanswered, such as how many data samples are needed for the model to converge, and what the best training strategy is.
Technical Explanation
This research paper aims to address some of these gaps by providing a new theoretical result for the existence of CNN-based autoencoders, under the assumption that the underlying parameter-to-solution map is holomorphic. This regularity condition is satisfied by many important classes of PDEs, such as the parametric diffusion equation, which the authors discuss in an explicit application of their general theory.
The authors leverage recent techniques from the field of sparse high-dimensional function approximation to derive their existence theorem for CNN-based autoencoders. This provides a stronger theoretical foundation for the empirical success of these models, which have been widely adopted in Deep-Learning based ROMs (DL-ROMs) and other deep learning approaches to PDEs and ROM.
Critical Analysis
The authors acknowledge that their theoretical result is based on the assumption of holomorphic (complex-differentiable) parameter-to-solution maps, which may not hold for all relevant PDE problems. Additionally, the paper does not address the practical challenges of training these CNN-based autoencoders, such as the choice of hyperparameters or the amount of training data required.
Further research is needed to understand the limitations of this approach and to explore other theoretical frameworks that could provide a more comprehensive understanding of deep learning methods in the context of PDEs and ROM. It would also be valuable to see more empirical studies that validate the authors' theoretical insights and provide guidance for practitioners on the effective implementation of these techniques.
Conclusion
This research paper takes an important step towards a stronger theoretical foundation for the use of deep learning, and in particular CNN-based autoencoders, in the fields of PDEs and ROM. By providing a new existence theorem for holomorphic parameter-to-solution maps, the authors have contributed to our understanding of why these data-driven techniques can be so effective, even in complex nonlinear problems. However, further work is needed to address the practical challenges and expand the theoretical reach of these powerful approaches.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🎲
0
A practical existence theorem for reduced order models based on convolutional autoencoders
Nicola Rares Franco, Simone Brugiapaglia
In recent years, deep learning has gained increasing popularity in the fields of Partial Differential Equations (PDEs) and Reduced Order Modeling (ROM), providing domain practitioners with new powerful data-driven techniques such as Physics-Informed Neural Networks (PINNs), Neural Operators, Deep Operator Networks (DeepONets) and Deep-Learning based ROMs (DL-ROMs). In this context, deep autoencoders based on Convolutional Neural Networks (CNNs) have proven extremely effective, outperforming established techniques, such as the reduced basis method, when dealing with complex nonlinear problems. However, despite the empirical success of CNN-based autoencoders, there are only a few theoretical results supporting these architectures, usually stated in the form of universal approximation theorems. In particular, although the existing literature provides users with guidelines for designing convolutional autoencoders, the subsequent challenge of learning the latent features has been barely investigated. Furthermore, many practical questions remain unanswered, e.g., the number of snapshots needed for convergence or the neural network training strategy. In this work, using recent techniques from sparse high-dimensional function approximation, we fill some of these gaps by providing a new practical existence theorem for CNN-based autoencoders when the parameter-to-solution map is holomorphic. This regularity assumption arises in many relevant classes of parametric PDEs, such as the parametric diffusion equation, for which we discuss an explicit application of our general theory.
Read more6/26/2024

0
Physics-informed deep learning and compressive collocation for high-dimensional diffusion-reaction equations: practical existence theory and numerics
Simone Brugiapaglia, Nick Dexter, Samir Karam, Weiqi Wang
On the forefront of scientific computing, Deep Learning (DL), i.e., machine learning with Deep Neural Networks (DNNs), has emerged a powerful new tool for solving Partial Differential Equations (PDEs). It has been observed that DNNs are particularly well suited to weakening the effect of the curse of dimensionality, a term coined by Richard E. Bellman in the late `50s to describe challenges such as the exponential dependence of the sample complexity, i.e., the number of samples required to solve an approximation problem, on the dimension of the ambient space. However, although DNNs have been used to solve PDEs since the `90s, the literature underpinning their mathematical efficiency in terms of numerical analysis (i.e., stability, accuracy, and sample complexity), is only recently beginning to emerge. In this paper, we leverage recent advancements in function approximation using sparsity-based techniques and random sampling to develop and analyze an efficient high-dimensional PDE solver based on DL. We show, both theoretically and numerically, that it can compete with a novel stable and accurate compressive spectral collocation method. In particular, we demonstrate a new practical existence theorem, which establishes the existence of a class of trainable DNNs with suitable bounds on the network architecture and a sufficient condition on the sample complexity, with logarithmic or, at worst, linear scaling in dimension, such that the resulting networks stably and accurately approximate a diffusion-reaction PDE with high probability.
Read more6/11/2024
0
Reduced-order modeling of unsteady fluid flow using neural network ensembles
Rakesh Halder, Mohammadmehdi Ataei, Hesam Salehipour, Krzysztof Fidkowski, Kevin Maki
The use of deep learning has become increasingly popular in reduced-order models (ROMs) to obtain low-dimensional representations of full-order models. Convolutional autoencoders (CAEs) are often used to this end as they are adept at handling data that are spatially distributed, including solutions to partial differential equations. When applied to unsteady physics problems, ROMs also require a model for time-series prediction of the low-dimensional latent variables. Long short-term memory (LSTM) networks, a type of recurrent neural network useful for modeling sequential data, are frequently employed in data-driven ROMs for autoregressive time-series prediction. When making predictions at unseen design points over long time horizons, error propagation is a frequently encountered issue, where errors made early on can compound over time and lead to large inaccuracies. In this work, we propose using bagging, a commonly used ensemble learning technique, to develop a fully data-driven ROM framework referred to as the CAE-eLSTM ROM that uses CAEs for spatial reconstruction of the full-order model and LSTM ensembles for time-series prediction. When applied to two unsteady fluid dynamics problems, our results show that the presented framework effectively reduces error propagation and leads to more accurate time-series prediction of latent variables at unseen points.
Read more8/12/2024
0
Bridging Autoencoders and Dynamic Mode Decomposition for Reduced-order Modeling and Control of PDEs
Priyabrata Saha, Saibal Mukhopadhyay
Modeling and controlling complex spatiotemporal dynamical systems driven by partial differential equations (PDEs) often necessitate dimensionality reduction techniques to construct lower-order models for computational efficiency. This paper explores a deep autoencoding learning method for reduced-order modeling and control of dynamical systems governed by spatiotemporal PDEs. We first analytically show that an optimization objective for learning a linear autoencoding reduced-order model can be formulated to yield a solution closely resembling the result obtained through the dynamic mode decomposition with control algorithm. We then extend this linear autoencoding architecture to a deep autoencoding framework, enabling the development of a nonlinear reduced-order model. Furthermore, we leverage the learned reduced-order model to design controllers using stability-constrained deep neural networks. Numerical experiments are presented to validate the efficacy of our approach in both modeling and control using the example of a reaction-diffusion system.
Read more9/12/2024