Vision-based 3D occupancy prediction in autonomous driving: a review and outlook
2405.02595
0
0

Abstract
In recent years, autonomous driving has garnered escalating attention for its potential to relieve drivers' burdens and improve driving safety. Vision-based 3D occupancy prediction, which predicts the spatial occupancy status and semantics of 3D voxel grids around the autonomous vehicle from image inputs, is an emerging perception task suitable for cost-effective perception system of autonomous driving. Although numerous studies have demonstrated the greater advantages of 3D occupancy prediction over object-centric perception tasks, there is still a lack of a dedicated review focusing on this rapidly developing field. In this paper, we first introduce the background of vision-based 3D occupancy prediction and discuss the challenges in this task. Secondly, we conduct a comprehensive survey of the progress in vision-based 3D occupancy prediction from three aspects: feature enhancement, deployment friendliness and label efficiency, and provide an in-depth analysis of the potentials and challenges of each category of methods. Finally, we present a summary of prevailing research trends and propose some inspiring future outlooks. To provide a valuable reference for researchers, a regularly updated collection of related papers, datasets, and codes is organized at https://github.com/zya3d/Awesome-3D-Occupancy-Prediction.
Create account to get full access
Overview
• This paper provides a comprehensive review and outlook on vision-based 3D occupancy prediction in the context of autonomous driving.
• The authors explore the latest advancements in this field, including Collaborative Semantic Occupancy Prediction, Real-Time 3D Semantic Occupancy Prediction, Predicting Future Spatiotemporal Occupancy Grids, Unified Spatio-Temporal Tri-Perspective View Representation, and Monocular 3D Lane Detection.
Plain English Explanation
The paper discusses the use of cameras and computer vision to predict the 3D layout of the environment around self-driving cars. This is an important capability for autonomous vehicles to safely navigate and avoid collisions. The authors review the latest advancements in this field, including models that can predict the future location of objects, understand the semantic meaning of the environment (e.g., roads, pedestrians, buildings), and use a single camera to detect 3D lane markings. These cutting-edge techniques aim to provide self-driving cars with a comprehensive understanding of their surroundings to enable safer and more reliable autonomous driving.
Technical Explanation
The paper presents a comprehensive review of vision-based 3D occupancy prediction techniques for autonomous driving. It covers the latest advancements in this field, including Collaborative Semantic Occupancy Prediction, which leverages multi-modal sensor fusion to predict 3D occupancy grids, and Real-Time 3D Semantic Occupancy Prediction, which can generate 3D semantic occupancy maps in real-time. The paper also discusses Predicting Future Spatiotemporal Occupancy Grids, which forecasts future occupancy based on semantic understanding, and Unified Spatio-Temporal Tri-Perspective View Representation, which combines multiple viewpoints to improve occupancy prediction. Additionally, the review covers Monocular 3D Lane Detection, which can infer 3D lane boundaries from a single camera.
Critical Analysis
The paper provides a comprehensive overview of the latest advancements in vision-based 3D occupancy prediction for autonomous driving, highlighting several promising approaches. However, the authors acknowledge that these techniques still face challenges, such as handling occlusions, dynamic environments, and diverse driving scenarios. Further research is needed to improve the robustness and generalization of these models. Additionally, the ethical implications of deploying such advanced perception systems in autonomous vehicles should be carefully considered, particularly regarding issues of safety, privacy, and accountability.
Conclusion
This paper offers a valuable review of the state-of-the-art in vision-based 3D occupancy prediction for autonomous driving. The authors have highlighted several cutting-edge techniques that leverage multi-modal sensor fusion, real-time semantic understanding, and multi-perspective reasoning to equip self-driving cars with a comprehensive spatial awareness of their environment. As this field continues to evolve, these advancements have the potential to significantly improve the safety and reliability of autonomous vehicles, paving the way for their widespread adoption.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🖼️
A Survey on Occupancy Perception for Autonomous Driving: The Information Fusion Perspective
Huaiyuan Xu, Junliang Chen, Shiyu Meng, Yi Wang, Lap-Pui Chau
0
0
3D occupancy perception technology aims to observe and understand dense 3D environments for autonomous vehicles. Owing to its comprehensive perception capability, this technology is emerging as a trend in autonomous driving perception systems, and is attracting significant attention from both industry and academia. Similar to traditional bird's-eye view (BEV) perception, 3D occupancy perception has the nature of multi-source input and the necessity for information fusion. However, the difference is that it captures vertical structures that are ignored by 2D BEV. In this survey, we review the most recent works on 3D occupancy perception, and provide in-depth analyses of methodologies with various input modalities. Specifically, we summarize general network pipelines, highlight information fusion techniques, and discuss effective network training. We evaluate and analyze the occupancy perception performance of the state-of-the-art on the most popular datasets. Furthermore, challenges and future research directions are discussed. We hope this paper will inspire the community and encourage more research work on 3D occupancy perception. A comprehensive list of studies in this survey is publicly available in an active repository that continuously collects the latest work: https://github.com/HuaiyuanXu/3D-Occupancy-Perception.
5/21/2024
🔮
Collaborative Semantic Occupancy Prediction with Hybrid Feature Fusion in Connected Automated Vehicles
Rui Song, Chenwei Liang, Hu Cao, Zhiran Yan, Walter Zimmer, Markus Gross, Andreas Festag, Alois Knoll
0
0
Collaborative perception in automated vehicles leverages the exchange of information between agents, aiming to elevate perception results. Previous camera-based collaborative 3D perception methods typically employ 3D bounding boxes or bird's eye views as representations of the environment. However, these approaches fall short in offering a comprehensive 3D environmental prediction. To bridge this gap, we introduce the first method for collaborative 3D semantic occupancy prediction. Particularly, it improves local 3D semantic occupancy predictions by hybrid fusion of (i) semantic and occupancy task features, and (ii) compressed orthogonal attention features shared between vehicles. Additionally, due to the lack of a collaborative perception dataset designed for semantic occupancy prediction, we augment a current collaborative perception dataset to include 3D collaborative semantic occupancy labels for a more robust evaluation. The experimental findings highlight that: (i) our collaborative semantic occupancy predictions excel above the results from single vehicles by over 30%, and (ii) models anchored on semantic occupancy outpace state-of-the-art collaborative 3D detection techniques in subsequent perception applications, showcasing enhanced accuracy and enriched semantic-awareness in road environments.
4/26/2024
Real-time 3D semantic occupancy prediction for autonomous vehicles using memory-efficient sparse convolution
Samuel Sze, Lars Kunze
0
0
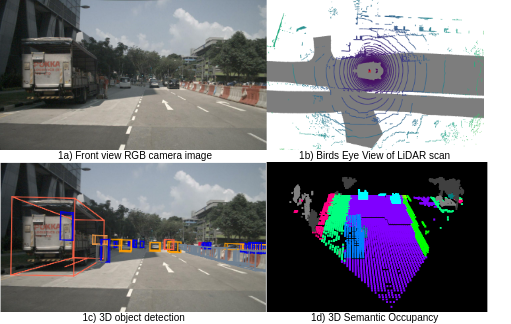
In autonomous vehicles, understanding the surrounding 3D environment of the ego vehicle in real-time is essential. A compact way to represent scenes while encoding geometric distances and semantic object information is via 3D semantic occupancy maps. State of the art 3D mapping methods leverage transformers with cross-attention mechanisms to elevate 2D vision-centric camera features into the 3D domain. However, these methods encounter significant challenges in real-time applications due to their high computational demands during inference. This limitation is particularly problematic in autonomous vehicles, where GPU resources must be shared with other tasks such as localization and planning. In this paper, we introduce an approach that extracts features from front-view 2D camera images and LiDAR scans, then employs a sparse convolution network (Minkowski Engine), for 3D semantic occupancy prediction. Given that outdoor scenes in autonomous driving scenarios are inherently sparse, the utilization of sparse convolution is particularly apt. By jointly solving the problems of 3D scene completion of sparse scenes and 3D semantic segmentation, we provide a more efficient learning framework suitable for real-time applications in autonomous vehicles. We also demonstrate competitive accuracy on the nuScenes dataset.
5/21/2024
🤯
Predicting Future Spatiotemporal Occupancy Grids with Semantics for Autonomous Driving
Maneekwan Toyungyernsub, Esen Yel, Jiachen Li, Mykel J. Kochenderfer
0
0
For autonomous vehicles to proactively plan safe trajectories and make informed decisions, they must be able to predict the future occupancy states of the local environment. However, common issues with occupancy prediction include predictions where moving objects vanish or become blurred, particularly at longer time horizons. We propose an environment prediction framework that incorporates environment semantics for future occupancy prediction. Our method first semantically segments the environment and uses this information along with the occupancy information to predict the spatiotemporal evolution of the environment. We validate our approach on the real-world Waymo Open Dataset. Compared to baseline methods, our model has higher prediction accuracy and is capable of maintaining moving object appearances in the predictions for longer prediction time horizons.
4/15/2024