Programmable Motion Generation for Open-Set Motion Control Tasks

0
Sign in to get full access
Overview
- This research paper introduces a new approach for generating programmable motion for open-set motion control tasks.
- The proposed method can generate diverse and high-quality motion sequences for a wide range of tasks, going beyond traditional motion generation methods.
- The paper explores how to leverage machine learning techniques to create a flexible and generalizable motion generation system.
Plain English Explanation
The paper presents a new way to generate motion sequences that can be used for a variety of different tasks. Traditional motion generation methods are often limited to specific, predefined tasks. In contrast, this new approach uses machine learning to create a more flexible and versatile motion generation system.
The key idea is to train a model that can generate diverse and high-quality motion sequences that can be programmed or "controlled" to perform different tasks. This allows the system to adapt to a wide range of open-set motion control tasks, rather than being constrained to a fixed set of predefined motions.
This research builds on recent advancements in machine learning-based human motion generation and physics-based motion control, aiming to create a more versatile and controllable motion generation system that can be used for a wide range of human motion-related applications.
Technical Explanation
The paper proposes a novel motion generation framework that combines machine learning techniques with physics-based simulation to create programmable and generalizable motion sequences. The key components of the approach include:
-
Programmable Motion Generator: A neural network-based model that can generate diverse motion sequences that can be controlled or "programmed" to perform different tasks. This is achieved by conditioning the motion generation on a set of control parameters.
-
Physics-based Simulation: The generated motions are evaluated in a physics-based simulation environment to ensure they are physically plausible and can be executed by a real-world system.
-
Reinforcement Learning-based Training: The motion generator is trained using a reinforcement learning approach, where the model learns to generate motions that maximize a reward function related to the desired task and physical feasibility.
The authors evaluate their approach on a range of open-set motion control tasks, demonstrating its ability to generate diverse and high-quality motion sequences that can be programmed to perform different actions. The results show that the proposed framework outperforms traditional motion generation methods in terms of both motion diversity and task-specific performance.
Critical Analysis
The paper presents a promising approach for creating a more flexible and generalizable motion generation system. The use of machine learning techniques, combined with physics-based simulation, represents an interesting and potentially impactful step forward in the field of motion control.
However, the paper does not address some potential limitations and challenges. For example, the training process may be computationally intensive and require a large amount of data to achieve good performance across a wide range of tasks. Additionally, the paper does not discuss the robustness of the generated motions to real-world uncertainties, such as changing environments or unexpected disturbances.
Further research could explore ways to improve the sample efficiency of the training process, as well as techniques to enhance the robustness and adaptability of the generated motions. Investigating the application of this framework to more complex motion control tasks, such as whole-body control of humanoid robots, could also be a fruitful area of future work.
Conclusion
This research paper introduces a new approach for generating programmable and generalizable motion sequences for a wide range of open-set motion control tasks. By combining machine learning techniques with physics-based simulation, the proposed framework can create diverse and high-quality motion sequences that can be programmed to perform different actions.
The ability to generate versatile and adaptable motion sequences has the potential to impact a variety of applications, from robotics and animation to human-computer interaction and beyond. While the paper highlights the promise of this approach, further research is needed to address the limitations and explore its full potential.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Programmable Motion Generation for Open-Set Motion Control Tasks
Hanchao Liu, Xiaohang Zhan, Shaoli Huang, Tai-Jiang Mu, Ying Shan
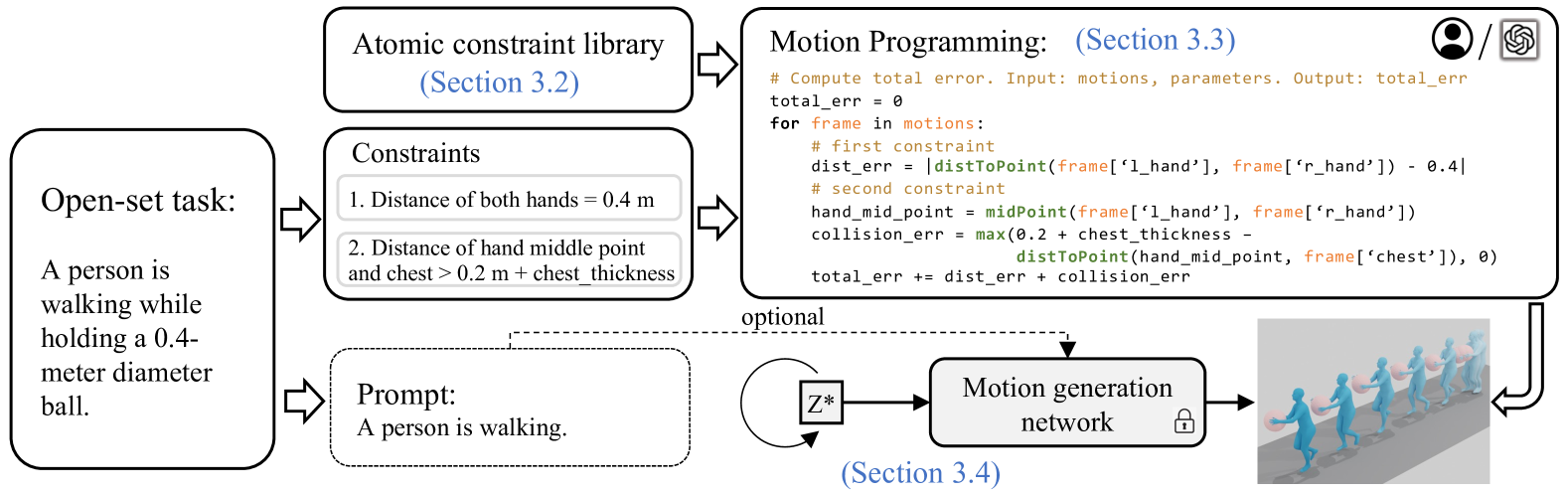
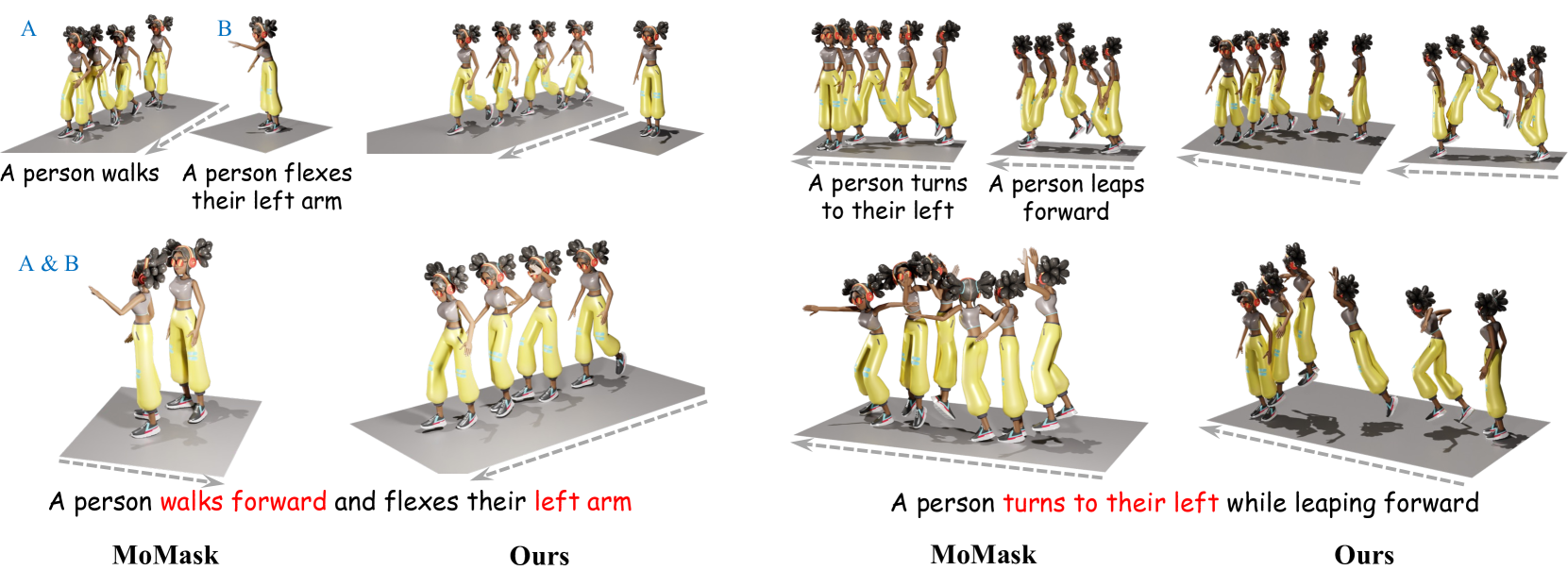
Character animation in real-world scenarios necessitates a variety of constraints, such as trajectories, key-frames, interactions, etc. Existing methodologies typically treat single or a finite set of these constraint(s) as separate control tasks. They are often specialized, and the tasks they address are rarely extendable or customizable. We categorize these as solutions to the close-set motion control problem. In response to the complexity of practical motion control, we propose and attempt to solve the open-set motion control problem. This problem is characterized by an open and fully customizable set of motion control tasks. To address this, we introduce a new paradigm, programmable motion generation. In this paradigm, any given motion control task is broken down into a combination of atomic constraints. These constraints are then programmed into an error function that quantifies the degree to which a motion sequence adheres to them. We utilize a pre-trained motion generation model and optimize its latent code to minimize the error function of the generated motion. Consequently, the generated motion not only inherits the prior of the generative model but also satisfies the required constraints. Experiments show that we can generate high-quality motions when addressing a wide range of unseen tasks. These tasks encompass motion control by motion dynamics, geometric constraints, physical laws, interactions with scenes, objects or the character own body parts, etc. All of these are achieved in a unified approach, without the need for ad-hoc paired training data collection or specialized network designs. During the programming of novel tasks, we observed the emergence of new skills beyond those of the prior model. With the assistance of large language models, we also achieved automatic programming. We hope that this work will pave the way for the motion control of general AI agents.
Read more5/30/2024

0
Task and Motion Planning for Execution in the Real
Tianyang Pan, Rahul Shome, Lydia E. Kavraki
Task and motion planning represents a powerful set of hybrid planning methods that combine reasoning over discrete task domains and continuous motion generation. Traditional reasoning necessitates task domain models and enough information to ground actions to motion planning queries. Gaps in this knowledge often arise from sources like occlusion or imprecise modeling. This work generates task and motion plans that include actions cannot be fully grounded at planning time. During execution, such an action is handled by a provided human-designed or learned closed-loop behavior. Execution combines offline planned motions and online behaviors till reaching the task goal. Failures of behaviors are fed back as constraints to find new plans. Forty real-robot trials and motivating demonstrations are performed to evaluate the proposed framework and compare against state-of-the-art. Results show faster execution time, less number of actions, and more success in problems where diverse gaps arise. The experiment data is shared for researchers to simulate these settings. The work shows promise in expanding the applicable class of realistic partially grounded problems that robots can address.
Read more6/14/2024
0
Learning Generalizable Human Motion Generator with Reinforcement Learning
Yunyao Mao, Xiaoyang Liu, Wengang Zhou, Zhenbo Lu, Houqiang Li
Text-driven human motion generation, as one of the vital tasks in computer-aided content creation, has recently attracted increasing attention. While pioneering research has largely focused on improving numerical performance metrics on given datasets, practical applications reveal a common challenge: existing methods often overfit specific motion expressions in the training data, hindering their ability to generalize to novel descriptions like unseen combinations of motions. This limitation restricts their broader applicability. We argue that the aforementioned problem primarily arises from the scarcity of available motion-text pairs, given the many-to-many nature of text-driven motion generation. To tackle this problem, we formulate text-to-motion generation as a Markov decision process and present textbf{InstructMotion}, which incorporate the trail and error paradigm in reinforcement learning for generalizable human motion generation. Leveraging contrastive pre-trained text and motion encoders, we delve into optimizing reward design to enable InstructMotion to operate effectively on both paired data, enhancing global semantic level text-motion alignment, and synthetic text-only data, facilitating better generalization to novel prompts without the need for ground-truth motion supervision. Extensive experiments on prevalent benchmarks and also our synthesized unpaired dataset demonstrate that the proposed InstructMotion achieves outstanding performance both quantitatively and qualitatively.
Read more5/27/2024

0
MotionCtrl: A Unified and Flexible Motion Controller for Video Generation
Zhouxia Wang, Ziyang Yuan, Xintao Wang, Tianshui Chen, Menghan Xia, Ping Luo, Ying Shan
Motions in a video primarily consist of camera motion, induced by camera movement, and object motion, resulting from object movement. Accurate control of both camera and object motion is essential for video generation. However, existing works either mainly focus on one type of motion or do not clearly distinguish between the two, limiting their control capabilities and diversity. Therefore, this paper presents MotionCtrl, a unified and flexible motion controller for video generation designed to effectively and independently control camera and object motion. The architecture and training strategy of MotionCtrl are carefully devised, taking into account the inherent properties of camera motion, object motion, and imperfect training data. Compared to previous methods, MotionCtrl offers three main advantages: 1) It effectively and independently controls camera motion and object motion, enabling more fine-grained motion control and facilitating flexible and diverse combinations of both types of motion. 2) Its motion conditions are determined by camera poses and trajectories, which are appearance-free and minimally impact the appearance or shape of objects in generated videos. 3) It is a relatively generalizable model that can adapt to a wide array of camera poses and trajectories once trained. Extensive qualitative and quantitative experiments have been conducted to demonstrate the superiority of MotionCtrl over existing methods. Project Page: https://wzhouxiff.github.io/projects/MotionCtrl/
Read more7/17/2024