Proprioception Is All You Need: Terrain Classification for Boreal Forests

0
🏷️
Sign in to get full access
Overview
- The paper introduces a new dataset called BorealTC for terrain classification in boreal forests.
- Boreal forests are an important area for autonomous vehicle navigation, but have many mobility-impeding terrains that must be considered.
- The dataset contains data from an Inertial Measurement Unit (IMU), motor current, and wheel odometry, focusing on common boreal forest terrains like snow, ice, and silty loam.
- The authors evaluate Convolutional Neural Network (CNN) and State Space Model (SSM)-based Mamba architectures on the terrain classification task.
Plain English Explanation
Autonomous vehicles, like self-driving cars or drones, are expected to become more common in the future, especially in areas like boreal forests. Boreal forests are one of the largest land biomes on Earth and have many different types of terrain that can make it difficult for these vehicles to navigate, such as snow, ice, and muddy soil.
To help address this challenge, the researchers in this paper created a new dataset called BorealTC. This dataset contains sensor data recorded from a robot as it moved through a boreal forest, including measurements from an inertial measurement unit (IMU), which can detect the robot's movements, as well as data on the robot's motor current and wheel rotation. The goal is to use this data to train machine learning models to accurately classify the different types of terrain the robot encounters.
The researchers tested two different machine learning models on the BorealTC dataset: a Convolutional Neural Network (CNN) and a novel State Space Model (SSM)-based Mamba architecture. They found that while the CNN performed better on each individual dataset, the Mamba model achieved greater accuracy when trained on a combination of the BorealTC dataset and another dataset from previous research. This suggests that the Mamba model may be better able to learn from a diverse set of terrain data.
Technical Explanation
The paper introduces a new publicly available dataset called BorealTC for proprioceptive-based terrain classification (TC) in boreal forests. Recorded using a Husky A200 robot, the dataset contains 116 minutes of data from an Inertial Measurement Unit (IMU), motor current, and wheel odometry, focusing on common boreal forest terrains like snow, ice, and silty loam.
The authors combine the BorealTC dataset with another dataset from prior work and evaluate two machine learning models on the TC task: a Convolutional Neural Network (CNN) and the novel State Space Model (SSM)-based Mamba architecture.
They find that while the CNN outperforms Mamba on each individual dataset, Mamba achieves greater accuracy when trained on the combined dataset. Additionally, the authors demonstrate that Mamba's learning capacity increases more than the CNN's as the amount of training data grows.
Through analysis, the researchers show that combining the two TC datasets results in a latent space that can be interpreted based on the properties of the different terrains. They also discuss the implications of merging datasets on classification performance.
Critical Analysis
The paper makes a strong case for the importance of terrain classification in boreal forests for autonomous vehicle navigation, and the BorealTC dataset provides a valuable resource for researchers in this area. However, the paper does not extensively discuss potential limitations or future work.
For example, it would be helpful to understand the geographic diversity of the data captured in the BorealTC dataset, as boreal forests can vary significantly across regions. Additionally, the dataset is limited to a single robot platform, so the generalizability of the models to other robotic systems is unclear.
Further research could also explore the robustness of the Mamba and CNN models to noisy or incomplete sensor data, as real-world autonomous navigation often involves dealing with imperfect information. Evaluating the models' performance on longer-term, sequential terrain classification tasks could also provide additional insights.
Conclusion
This paper presents a valuable new dataset and models for terrain classification in boreal forests, an important area for the development of autonomous vehicles. By combining the BorealTC dataset with prior work, the authors demonstrate the potential of the Mamba architecture to learn from diverse terrain data and achieve high classification accuracy.
While the paper focuses primarily on the technical details, the insights have broader implications for improving the resilience and adaptability of autonomous systems operating in challenging, unstructured environments. As the use of these technologies continues to grow, datasets and models like those introduced here will play a crucial role in enabling safe and reliable navigation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏷️
0
Proprioception Is All You Need: Terrain Classification for Boreal Forests
Damien LaRocque, William Guimont-Martin, David-Alexandre Duclos, Philippe Gigu`ere, Franc{c}ois Pomerleau
Recent works in field robotics highlighted the importance of resiliency against different types of terrains. Boreal forests, in particular, are home to many mobility-impeding terrains that should be considered for off-road autonomous navigation. Also, being one of the largest land biomes on Earth, boreal forests are an area where autonomous vehicles are expected to become increasingly common. In this paper, we address this issue by introducing BorealTC, a publicly available dataset for proprioceptive-based terrain classification (TC). Recorded with a Husky A200, our dataset contains 116 min of Inertial Measurement Unit (IMU), motor current, and wheel odometry data, focusing on typical boreal forest terrains, notably snow, ice, and silty loam. Combining our dataset with another dataset from the state-of-the-art, we evaluate both a Convolutional Neural Network (CNN) and the novel state space model (SSM)-based Mamba architecture on a TC task. Interestingly, we show that while CNN outperforms Mamba on each separate dataset, Mamba achieves greater accuracy when trained on a combination of both. In addition, we demonstrate that Mamba's learning capacity is greater than a CNN for increasing amounts of data. We show that the combination of two TC datasets yields a latent space that can be interpreted with the properties of the terrains. We also discuss the implications of merging datasets on classification. Our source code and dataset are publicly available online: https://github.com/norlab-ulaval/BorealTC.
Read more9/30/2024

0
Terrain Classification Enhanced with Uncertainty for Space Exploration Robots from Proprioceptive Data
Mariela De Lucas 'Alvarez, Jichen Guo, Raul Dom'inguez, Matias Valdenegro-Toro
Terrain Classification is an essential task in space exploration, where unpredictable environments are difficult to observe using only exteroceptive sensors such as vision. Implementing Neural Network classifiers can have high performance but can be deemed untrustworthy as they lack transparency, which makes them unreliable for taking high-stakes decisions during mission planning. We address this by proposing Neural Networks with Uncertainty Quantification in Terrain Classification. We enable our Neural Networks with Monte Carlo Dropout, DropConnect, and Flipout in time series-capable architectures using only proprioceptive data as input. We use Bayesian Optimization with Hyperband for efficient hyperparameter optimization to find optimal models for trustworthy terrain classification.
Read more7/4/2024
🤿
0
UAV-Assisted Self-Supervised Terrain Awareness for Off-Road Navigation
Jean-Michel Fortin, Olivier Gamache, William Fecteau, Effie Daum, William Larriv'ee-Hardy, Franc{c}ois Pomerleau, Philippe Gigu`ere
Terrain awareness is an essential milestone to enable truly autonomous off-road navigation. Accurately predicting terrain characteristics allows optimizing a vehicle's path against potential hazards. Recent methods use deep neural networks to predict traversability-related terrain properties in a self-supervised manner, relying on proprioception as a training signal. However, onboard cameras are inherently limited by their point-of-view relative to the ground, suffering from occlusions and vanishing pixel density with distance. This paper introduces a novel approach for self-supervised terrain characterization using an aerial perspective from a hovering drone. We capture terrain-aligned images while sampling the environment with a ground vehicle, effectively training a simple predictor for vibrations, bumpiness, and energy consumption. Our dataset includes 2.8 km of off-road data collected in forest environment, comprising 13 484 ground-based images and 12 935 aerial images. Our findings show that drone imagery improves terrain property prediction by 21.37 % on the whole dataset and 37.35 % in high vegetation, compared to ground robot images. We conduct ablation studies to identify the main causes of these performance improvements. We also demonstrate the real-world applicability of our approach by scouting an unseen area with a drone, planning and executing an optimized path on the ground.
Read more9/30/2024
0
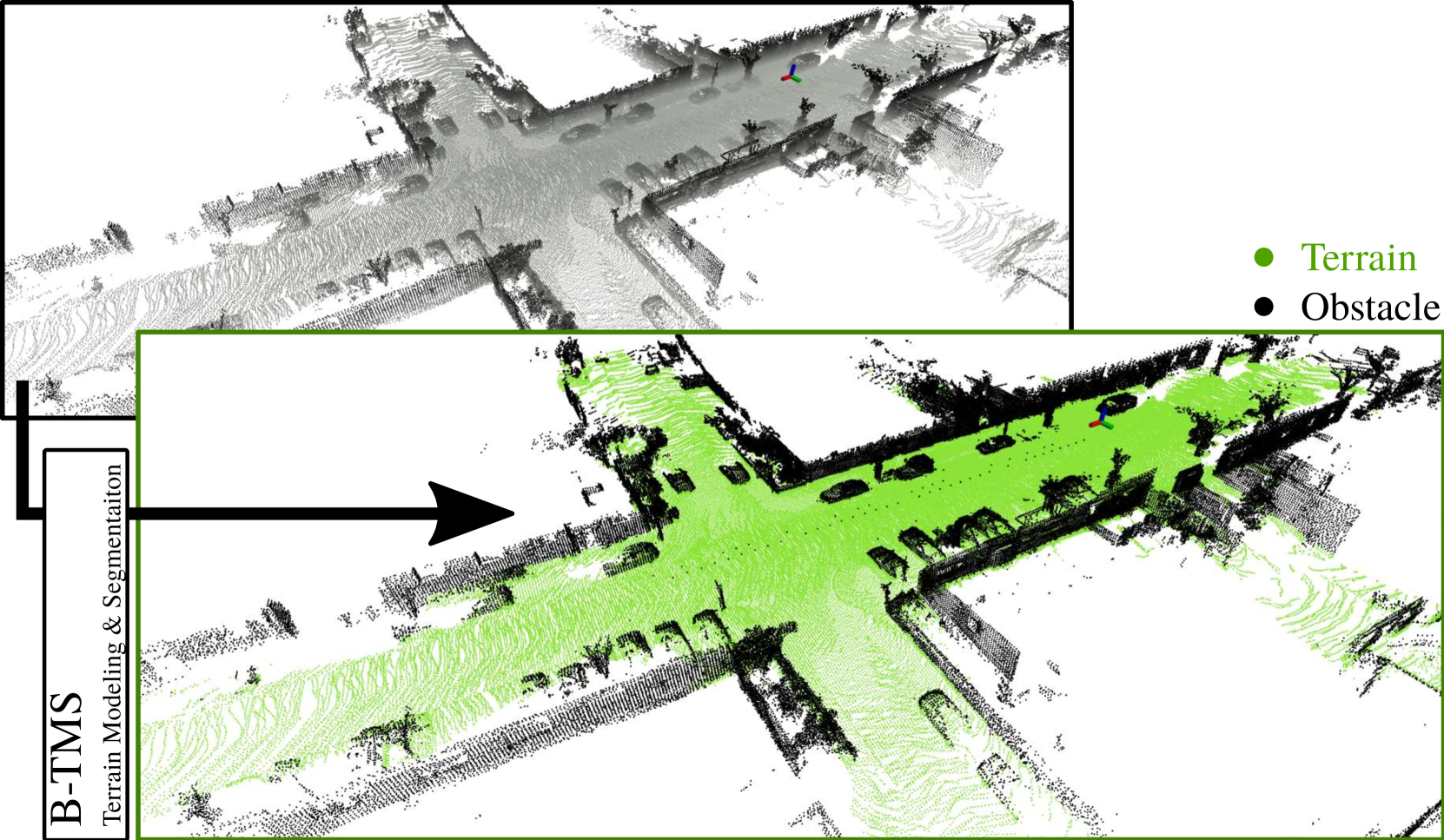
B-TMS: Bayesian Traversable Terrain Modeling and Segmentation Across 3D LiDAR Scans and Maps for Enhanced Off-Road Navigation
Minho Oh, Gunhee Shin, Seoyeon Jang, Seungjae Lee, Dongkyu Lee, Wonho Song, Byeongho Yu, Hyungtae Lim, Jaeyoung Lee, Hyun Myung
Recognizing traversable terrain from 3D point cloud data is critical, as it directly impacts the performance of autonomous navigation in off-road environments. However, existing segmentation algorithms often struggle with challenges related to changes in data distribution, environmental specificity, and sensor variations. Moreover, when encountering sunken areas, their performance is frequently compromised, and they may even fail to recognize them. To address these challenges, we introduce B-TMS, a novel approach that performs map-wise terrain modeling and segmentation by utilizing Bayesian generalized kernel (BGK) within the graph structure known as the tri-grid field (TGF). Our experiments encompass various data distributions, ranging from single scans to partial maps, utilizing both public datasets representing urban scenes and off-road environments, and our own dataset acquired from extremely bumpy terrains. Our results demonstrate notable contributions, particularly in terms of robustness to data distribution variations, adaptability to diverse environmental conditions, and resilience against the challenges associated with parameter changes.
Read more6/27/2024