B-TMS: Bayesian Traversable Terrain Modeling and Segmentation Across 3D LiDAR Scans and Maps for Enhanced Off-Road Navigation

0
Sign in to get full access
Overview
- This paper introduces B-TMS, a Bayesian method for modeling and segmenting traversable terrain across 3D LiDAR scans and maps to enhance off-road navigation.
- The approach combines a Bayesian probabilistic model with efficient inference techniques to classify terrain as traversable or non-traversable.
- It leverages both current sensor data and prior map information to improve terrain assessment, enabling more robust and adaptable off-road navigation.
Plain English Explanation
The paper presents a new system called B-TMS that aims to help robots and autonomous vehicles navigate more effectively in off-road environments. Off-road navigation can be challenging because the terrain can be unpredictable and change over time.
B-TMS uses a Bayesian approach, which means it builds a probabilistic model of the terrain based on sensor data (such as 3D laser scans) and prior map information. This allows the system to assess how traversable different areas of terrain are, classifying them as either "traversable" or "non-traversable".
By combining current sensor data with information from previous maps, B-TMS can make more accurate and adaptable terrain assessments. This is important for off-road navigation, where the terrain can be uneven, muddy, or obstructed in ways that are hard to predict.
The key idea is to use a statistical model that can learn from past experiences (the map data) and adapt to new sensor information in real-time. This helps the robot or vehicle navigate safely and efficiently through unpredictable off-road environments.
Technical Explanation
The B-TMS system uses a Bayesian approach to model and segment traversable terrain across 3D LiDAR scans and maps. It builds on prior work in Bayesian simultaneous localization and multi-lane tracking and emergent scene decomposition from visual memory.
The key technical components of B-TMS include:
- A Bayesian probabilistic model that represents the traversability of terrain based on features extracted from 3D LiDAR data and prior map information.
- An efficient inference algorithm that can quickly classify terrain as traversable or non-traversable by performing approximate Bayesian inference on the model.
- A mechanism for seamlessly fusing current sensor data with historical map information to improve terrain assessment over time, enabling more robust and adaptable off-road navigation.
The paper demonstrates the effectiveness of B-TMS through experiments on real-world forest traversability estimation and long-term robotic mapping datasets. The results show that B-TMS can outperform baseline methods in accurately classifying traversable terrain, leading to more efficient and reliable off-road navigation.
Critical Analysis
The paper provides a thorough technical description of the B-TMS system and presents compelling experimental results. However, it does not extensively discuss the limitations or potential downsides of the approach.
One potential concern is the reliance on prior map data, which may not always be available or up-to-date, especially in rapidly changing environments. The paper does not address how B-TMS would perform in the absence of reliable map information or how it could adapt to significant changes in the terrain.
Additionally, the paper does not delve into the computational complexity and runtime performance of the Bayesian inference algorithm, which could be an important consideration for real-time deployment on resource-constrained robotic platforms.
Further research could explore ways to make B-TMS more robust to missing or outdated map data, as well as investigate its feasibility for large-scale, long-term deployment in diverse off-road settings.
Conclusion
The B-TMS system presented in this paper offers a promising approach to enhancing off-road navigation by leveraging Bayesian terrain modeling and segmentation. By fusing current sensor data with historical map information, B-TMS can make more accurate and adaptable assessments of traversable terrain, leading to more efficient and reliable autonomous navigation in challenging off-road environments.
While the paper demonstrates the effectiveness of the system, further research is needed to address potential limitations and explore ways to make B-TMS more robust and deployable in real-world applications. Overall, the work represents an important step towards more capable and adaptive off-road navigation systems, with potential applications in areas such as autonomous vehicles, search and rescue operations, and environmental monitoring.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
B-TMS: Bayesian Traversable Terrain Modeling and Segmentation Across 3D LiDAR Scans and Maps for Enhanced Off-Road Navigation
Minho Oh, Gunhee Shin, Seoyeon Jang, Seungjae Lee, Dongkyu Lee, Wonho Song, Byeongho Yu, Hyungtae Lim, Jaeyoung Lee, Hyun Myung
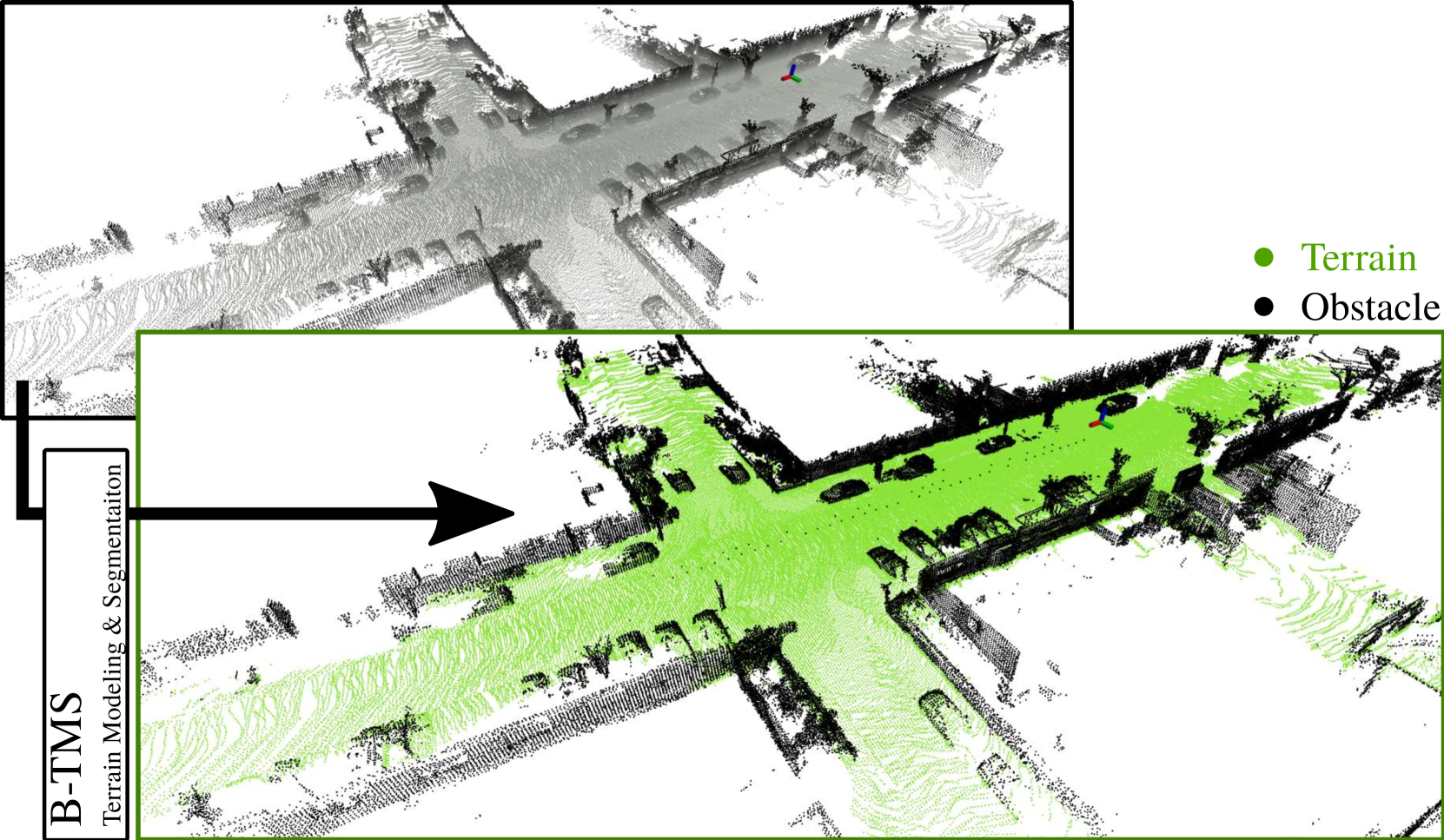
Recognizing traversable terrain from 3D point cloud data is critical, as it directly impacts the performance of autonomous navigation in off-road environments. However, existing segmentation algorithms often struggle with challenges related to changes in data distribution, environmental specificity, and sensor variations. Moreover, when encountering sunken areas, their performance is frequently compromised, and they may even fail to recognize them. To address these challenges, we introduce B-TMS, a novel approach that performs map-wise terrain modeling and segmentation by utilizing Bayesian generalized kernel (BGK) within the graph structure known as the tri-grid field (TGF). Our experiments encompass various data distributions, ranging from single scans to partial maps, utilizing both public datasets representing urban scenes and off-road environments, and our own dataset acquired from extremely bumpy terrains. Our results demonstrate notable contributions, particularly in terms of robustness to data distribution variations, adaptability to diverse environmental conditions, and resilience against the challenges associated with parameter changes.
Read more6/27/2024

0
TGS: Trajectory Generation and Selection using Vision Language Models in Mapless Outdoor Environments
Daeun Song, Jing Liang, Xuesu Xiao, Dinesh Manocha
We present a multi-modal trajectory generation and selection algorithm for real-world mapless outdoor navigation in challenging scenarios with unstructured off-road features like buildings, grass, and curbs. Our goal is to compute suitable trajectories that (1) satisfy the environment-specific traversability constraints and (2) generate human-like paths while navigating in crosswalks, sidewalks, etc. Our formulation uses a Conditional Variational Autoencoder (CVAE) generative model enhanced with traversability constraints to generate multiple candidate trajectories for global navigation. We use VLMs and a visual prompting approach with their zero-shot ability of semantic understanding and logical reasoning to choose the best trajectory given the contextual information about the task. We evaluate our methods in various outdoor scenes with wheeled robots and compare the performance with other global navigation algorithms. In practice, we observe at least 3.35% improvement in traversability and 20.61% improvement in terms of human-like navigation in generated trajectories in challenging outdoor navigation scenarios.
Read more8/9/2024
🛠️
0
Bayesian Simultaneous Localization and Multi-Lane Tracking Using Onboard Sensors and a SD Map
Yuxuan Xia, Erik Stenborg, Junsheng Fu, Gustaf Hendeby
High-definition map with accurate lane-level information is crucial for autonomous driving, but the creation of these maps is a resource-intensive process. To this end, we present a cost-effective solution to create lane-level roadmaps using only the global navigation satellite system (GNSS) and a camera on customer vehicles. Our proposed solution utilizes a prior standard-definition (SD) map, GNSS measurements, visual odometry, and lane marking edge detection points, to simultaneously estimate the vehicle's 6D pose, its position within a SD map, and also the 3D geometry of traffic lines. This is achieved using a Bayesian simultaneous localization and multi-object tracking filter, where the estimation of traffic lines is formulated as a multiple extended object tracking problem, solved using a trajectory Poisson multi-Bernoulli mixture (TPMBM) filter. In TPMBM filtering, traffic lines are modeled using B-spline trajectories, and each trajectory is parameterized by a sequence of control points. The proposed solution has been evaluated using experimental data collected by a test vehicle driving on highway. Preliminary results show that the traffic line estimates, overlaid on the satellite image, generally align with the lane markings up to some lateral offsets.
Read more5/8/2024
🎯
0
Memorize What Matters: Emergent Scene Decomposition from Multitraverse
Yiming Li, Zehong Wang, Yue Wang, Zhiding Yu, Zan Gojcic, Marco Pavone, Chen Feng, Jose M. Alvarez
Humans naturally retain memories of permanent elements, while ephemeral moments often slip through the cracks of memory. This selective retention is crucial for robotic perception, localization, and mapping. To endow robots with this capability, we introduce 3D Gaussian Mapping (3DGM), a self-supervised, camera-only offline mapping framework grounded in 3D Gaussian Splatting. 3DGM converts multitraverse RGB videos from the same region into a Gaussian-based environmental map while concurrently performing 2D ephemeral object segmentation. Our key observation is that the environment remains consistent across traversals, while objects frequently change. This allows us to exploit self-supervision from repeated traversals to achieve environment-object decomposition. More specifically, 3DGM formulates multitraverse environmental mapping as a robust differentiable rendering problem, treating pixels of the environment and objects as inliers and outliers, respectively. Using robust feature distillation, feature residuals mining, and robust optimization, 3DGM jointly performs 2D segmentation and 3D mapping without human intervention. We build the Mapverse benchmark, sourced from the Ithaca365 and nuPlan datasets, to evaluate our method in unsupervised 2D segmentation, 3D reconstruction, and neural rendering. Extensive results verify the effectiveness and potential of our method for self-driving and robotics.
Read more5/31/2024