Terrain Classification Enhanced with Uncertainty for Space Exploration Robots from Proprioceptive Data

0

Sign in to get full access
Overview
- This paper presents a novel terrain classification system for space exploration robots that incorporates uncertainty quantification.
- The system uses proprioceptive data from the robot's sensors to classify the terrain, allowing for safe navigation in complex environments.
- The authors employ deep neural networks and uncertainty estimation techniques to improve the reliability and robustness of the terrain classification.
Plain English Explanation
Robots exploring space often need to navigate over various types of terrain, such as rocky, sandy, or icy surfaces. Terrain classification is crucial for these robots to understand the environment and plan their movements safely. This paper presents a new way for space robots to classify the terrain using the information from their own sensors, known as proprioceptive data.
The key innovation is that the system not only classifies the terrain but also estimates the uncertainty of its own predictions. This uncertainty information can be used by the robot to make more informed decisions about how to navigate the terrain. For example, if the system is highly uncertain about the terrain type, the robot may choose to move more cautiously or seek additional information before proceeding.
The authors use advanced machine learning techniques, including deep neural networks, to develop this terrain classification system. By incorporating uncertainty quantification, the system becomes more reliable and robust, which is crucial for space exploration where the environments can be unpredictable and the consequences of mistakes can be severe.
Technical Explanation
The paper proposes a terrain classification system for space exploration robots that utilizes proprioceptive data, such as joint angles and torques, to classify the terrain while also estimating the uncertainty of the classification.
The authors develop a deep neural network architecture that takes the robot's proprioceptive data as input and outputs both the terrain class and an associated uncertainty estimate. The uncertainty quantification is achieved through the use of Bayesian deep learning techniques, specifically Monte Carlo dropout.
The proposed system was evaluated on a quadruped robot navigating over various terrains, including flat, rocky, and sandy surfaces. The results demonstrate that the uncertainty-aware terrain classification outperforms standard classification approaches in terms of accuracy and reliability, particularly in challenging or ambiguous terrain scenarios.
Critical Analysis
The paper provides a compelling approach to terrain classification for space exploration robots, addressing the important issue of uncertainty quantification. By incorporating uncertainty estimates into the terrain classification, the system can help the robot make more informed decisions, leading to safer and more reliable navigation in complex environments.
However, the paper does not extensively discuss the practical limitations or potential challenges of implementing this system on actual space exploration platforms. For example, the computational and power requirements of the deep neural network-based approach may be a concern for resource-constrained robots operating in remote environments.
Additionally, the evaluation was conducted on a quadruped robot in a simulated environment, and further testing on physical robots and in more diverse real-world terrain conditions would be valuable to fully assess the system's performance and robustness.
Conclusion
This paper presents a novel terrain classification system for space exploration robots that combines deep learning-based classification with uncertainty quantification. By providing the robot with not only the terrain type but also an estimate of the confidence in that classification, the system can enable more informed and reliable decision-making during navigation.
The incorporation of uncertainty estimation is a significant advancement in the field of legged robot navigation over rough terrain, as it addresses a crucial limitation of traditional classification approaches. If successfully deployed on future space exploration missions, this technology could contribute to more robust and safe navigation for robots operating in challenging extraterrestrial environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Terrain Classification Enhanced with Uncertainty for Space Exploration Robots from Proprioceptive Data
Mariela De Lucas 'Alvarez, Jichen Guo, Raul Dom'inguez, Matias Valdenegro-Toro
Terrain Classification is an essential task in space exploration, where unpredictable environments are difficult to observe using only exteroceptive sensors such as vision. Implementing Neural Network classifiers can have high performance but can be deemed untrustworthy as they lack transparency, which makes them unreliable for taking high-stakes decisions during mission planning. We address this by proposing Neural Networks with Uncertainty Quantification in Terrain Classification. We enable our Neural Networks with Monte Carlo Dropout, DropConnect, and Flipout in time series-capable architectures using only proprioceptive data as input. We use Bayesian Optimization with Hyperband for efficient hyperparameter optimization to find optimal models for trustworthy terrain classification.
Read more7/4/2024
🤿
0
New!UAV-Assisted Self-Supervised Terrain Awareness for Off-Road Navigation
Jean-Michel Fortin, Olivier Gamache, William Fecteau, Effie Daum, William Larriv'ee-Hardy, Franc{c}ois Pomerleau, Philippe Gigu`ere
Terrain awareness is an essential milestone to enable truly autonomous off-road navigation. Accurately predicting terrain characteristics allows optimizing a vehicle's path against potential hazards. Recent methods use deep neural networks to predict traversability-related terrain properties in a self-supervised manner, relying on proprioception as a training signal. However, onboard cameras are inherently limited by their point-of-view relative to the ground, suffering from occlusions and vanishing pixel density with distance. This paper introduces a novel approach for self-supervised terrain characterization using an aerial perspective from a hovering drone. We capture terrain-aligned images while sampling the environment with a ground vehicle, effectively training a simple predictor for vibrations, bumpiness, and energy consumption. Our dataset includes 2.8 km of off-road data collected in forest environment, comprising 13 484 ground-based images and 12 935 aerial images. Our findings show that drone imagery improves terrain property prediction by 21.37 % on the whole dataset and 37.35 % in high vegetation, compared to ground robot images. We conduct ablation studies to identify the main causes of these performance improvements. We also demonstrate the real-world applicability of our approach by scouting an unseen area with a drone, planning and executing an optimized path on the ground.
Read more9/30/2024
🏷️
0
New!Proprioception Is All You Need: Terrain Classification for Boreal Forests
Damien LaRocque, William Guimont-Martin, David-Alexandre Duclos, Philippe Gigu`ere, Franc{c}ois Pomerleau
Recent works in field robotics highlighted the importance of resiliency against different types of terrains. Boreal forests, in particular, are home to many mobility-impeding terrains that should be considered for off-road autonomous navigation. Also, being one of the largest land biomes on Earth, boreal forests are an area where autonomous vehicles are expected to become increasingly common. In this paper, we address this issue by introducing BorealTC, a publicly available dataset for proprioceptive-based terrain classification (TC). Recorded with a Husky A200, our dataset contains 116 min of Inertial Measurement Unit (IMU), motor current, and wheel odometry data, focusing on typical boreal forest terrains, notably snow, ice, and silty loam. Combining our dataset with another dataset from the state-of-the-art, we evaluate both a Convolutional Neural Network (CNN) and the novel state space model (SSM)-based Mamba architecture on a TC task. Interestingly, we show that while CNN outperforms Mamba on each separate dataset, Mamba achieves greater accuracy when trained on a combination of both. In addition, we demonstrate that Mamba's learning capacity is greater than a CNN for increasing amounts of data. We show that the combination of two TC datasets yields a latent space that can be interpreted with the properties of the terrains. We also discuss the implications of merging datasets on classification. Our source code and dataset are publicly available online: https://github.com/norlab-ulaval/BorealTC.
Read more9/30/2024
0
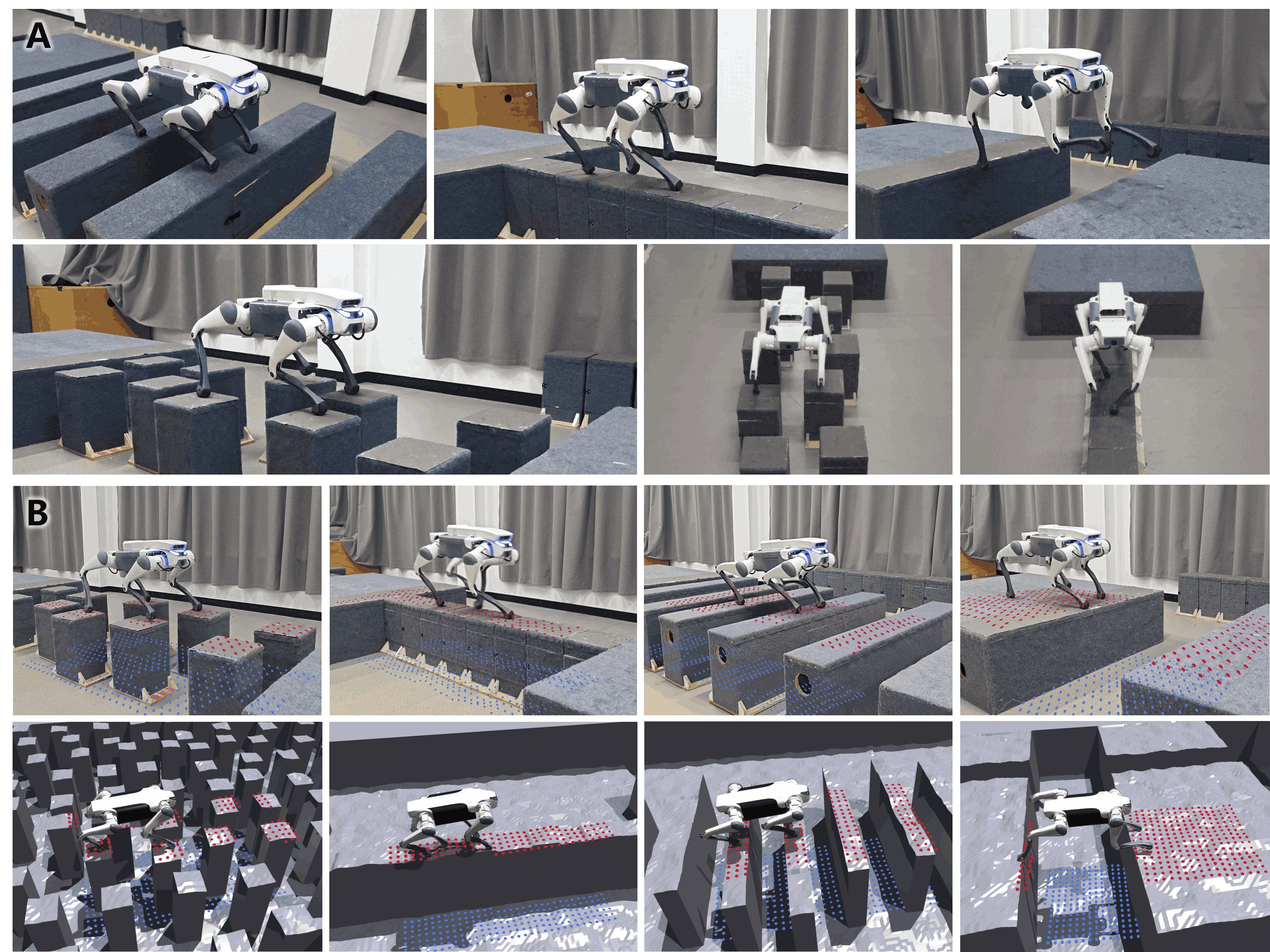
Walking with Terrain Reconstruction: Learning to Traverse Risky Sparse Footholds
Ruiqi Yu, Qianshi Wang, Yizhen Wang, Zhicheng Wang, Jun Wu, Qiuguo Zhu
Traversing risky terrains with sparse footholds presents significant challenges for legged robots, requiring precise foot placement in safe areas. Current learning-based methods often rely on implicit feature representations without supervising physically significant estimation targets. This limits the policy's ability to fully understand complex terrain structures, which is critical for generating accurate actions. In this paper, we utilize end-to-end reinforcement learning to traverse risky terrains with high sparsity and randomness. Our approach integrates proprioception with single-view depth images to reconstruct robot's local terrain, enabling a more comprehensive representation of terrain information. Meanwhile, by incorporating implicit and explicit estimations of the robot's state and its surroundings, we improve policy's environmental understanding, leading to more precise actions. We deploy the proposed framework on a low-cost quadrupedal robot, achieving agile and adaptive locomotion across various challenging terrains and demonstrating outstanding performance in real-world scenarios. Video at: http://youtu.be/ReQAR4D6tuc.
Read more9/25/2024