Quality-Aware Task Offloading for Cooperative Perception in Vehicular Edge Computing

0
Sign in to get full access
Overview
- This paper explores a quality-aware task offloading approach for cooperative perception in vehicular edge computing environments.
- It aims to optimize the offloading of perception tasks from autonomous vehicles to nearby edge servers to enhance the overall perception quality.
- The proposed solution considers factors like communication latency, computation capability, and perception quality to make informed offloading decisions.
Plain English Explanation
Autonomous vehicles rely on complex perception systems to navigate the world safely. However, the onboard computing resources of these vehicles may be limited, which can impact the quality of their perception. This paper explores a way to address this by allowing the vehicles to offload some of their perception tasks to nearby edge servers.
Edge servers are computing resources located at the edge of a network, closer to the vehicles than traditional cloud servers. By offloading perception tasks to these edge servers, the vehicles can leverage more powerful computing resources to improve the quality of their perception. The paper proposes a "quality-aware" approach, which means the system considers factors like communication latency, server capabilities, and the resulting perception quality when deciding what tasks to offload.
This allows the system to make informed decisions about which tasks to offload in order to optimize the overall perception quality for the autonomous vehicles. Similar work has explored cooperative perception between vehicles, but this paper focuses on the role of the edge computing infrastructure in supporting this.
Technical Explanation
The paper presents a quality-aware task offloading framework for cooperative perception in vehicular edge computing environments. The key elements of the proposed approach are:
-
Perception Task Model: The authors define a perception task model that captures the relationships between task complexity, communication latency, computation capability, and perception quality.
-
Offloading Decision Making: The framework employs a "quality-aware" offloading decision algorithm that considers the above factors to determine which perception tasks should be offloaded from the vehicle to nearby edge servers.
-
Cooperative Perception Coordination: The system coordinates the offloading decisions across multiple vehicles to optimize the overall cooperative perception performance, as described in related work.
-
Multi-Objective Optimization: The offloading decision problem is formulated as a multi-objective optimization problem, balancing factors like computation offloading and perception quality.
The authors evaluate their proposed framework through simulations and demonstrate its effectiveness in improving cooperative perception quality compared to baseline approaches.
Critical Analysis
The paper presents a well-designed and comprehensive framework for quality-aware task offloading in vehicular edge computing environments. The authors have thoughtfully considered the key factors that influence perception quality and offloading decisions, and their multi-objective optimization approach is a reasonable way to balance these competing concerns.
However, the paper does not address some potential limitations or areas for further research. For example, the simulation-based evaluation may not fully capture the complexities of real-world vehicular networks and edge computing infrastructures. Additionally, the paper does not discuss the scalability of the proposed approach as the number of vehicles and edge servers increases.
Furthermore, the paper could have explored the robustness of the system to uncertainties, such as varying communication conditions or unexpected changes in server availability. Addressing these aspects would help strengthen the practical applicability of the proposed framework.
Conclusion
This paper presents a quality-aware task offloading framework for cooperative perception in vehicular edge computing environments. By allowing autonomous vehicles to offload perception tasks to nearby edge servers, the system can leverage more powerful computing resources to enhance the overall perception quality.
The authors' multi-objective optimization approach balances factors like communication latency, computation capability, and perception quality to make informed offloading decisions. While the paper demonstrates the effectiveness of this approach through simulations, further research is needed to address potential limitations and enhance the real-world applicability of the proposed framework.
Overall, this work contributes to the ongoing efforts to improve the perception capabilities of autonomous vehicles, which is a crucial step towards the realization of safer and more reliable self-driving technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Quality-Aware Task Offloading for Cooperative Perception in Vehicular Edge Computing
Amr M. Zaki, Sara A. Elsayed, Khalid Elgazzar, Hossam S. Hassanein
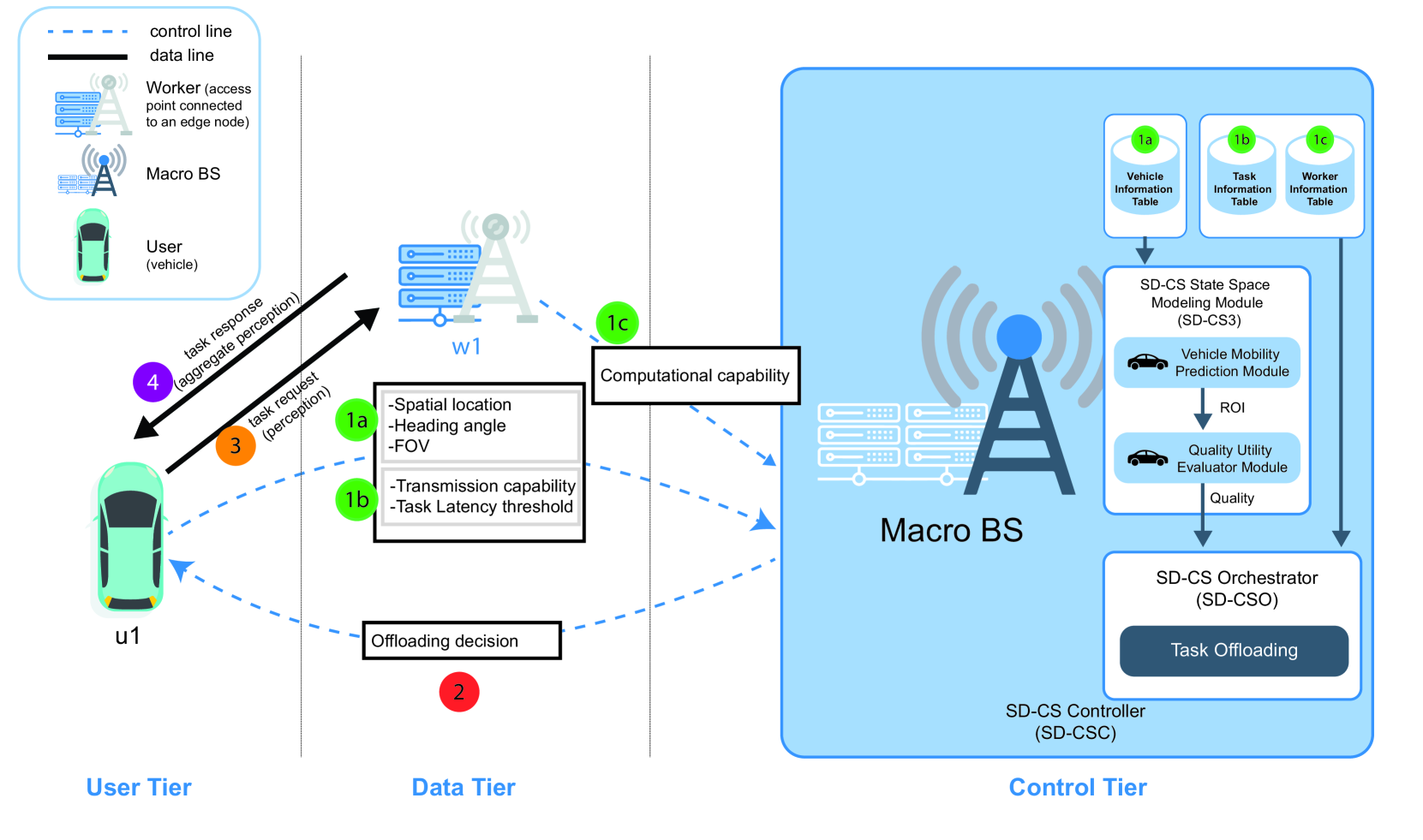
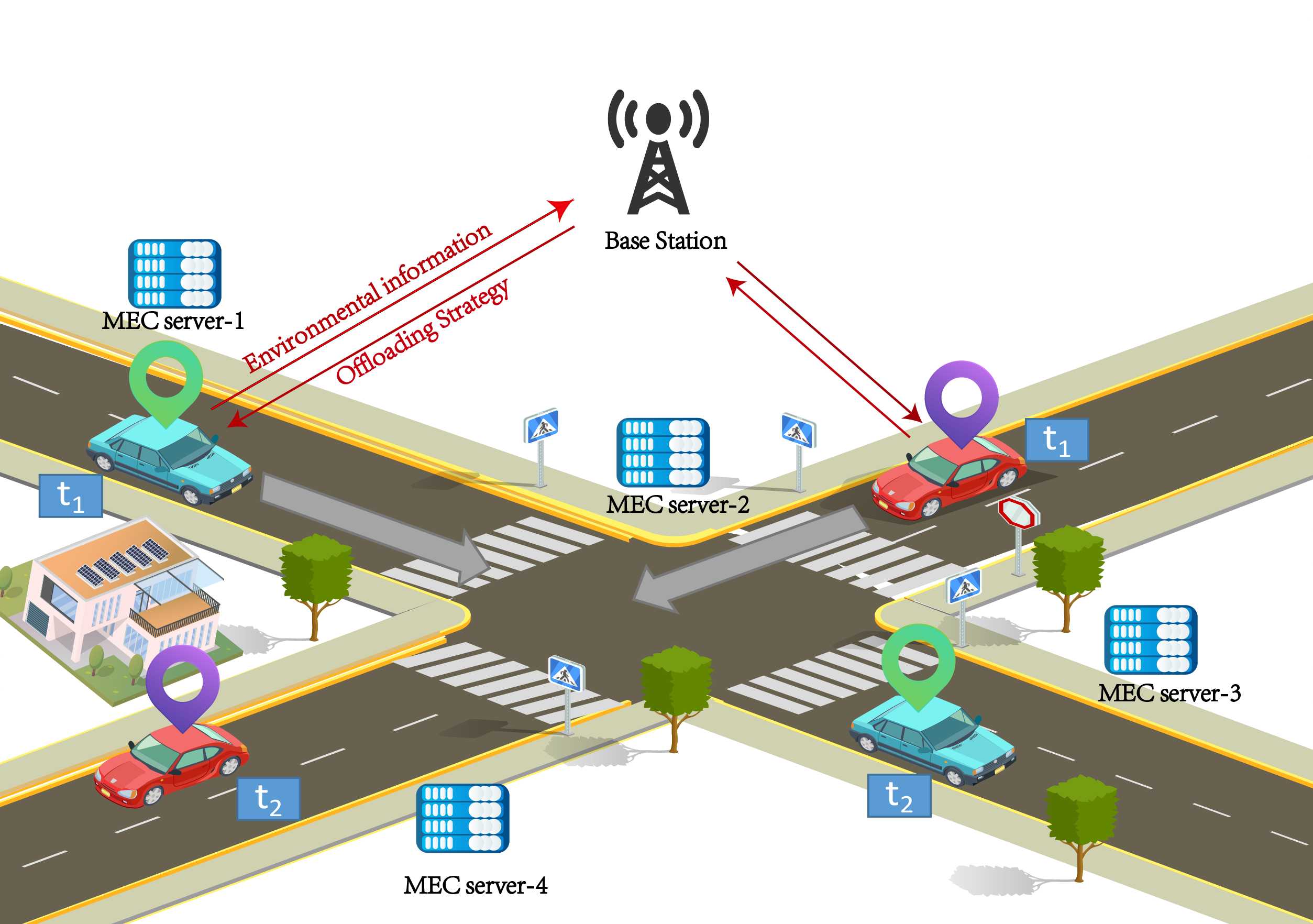
Task offloading in Vehicular Edge Computing (VEC) can advance cooperative perception (CP) to improve traffic awareness in Autonomous Vehicles. In this paper, we propose the Quality-aware Cooperative Perception Task Offloading (QCPTO) scheme. Q-CPTO is the first task offloading scheme that enhances traffic awareness by prioritizing the quality rather than the quantity of cooperative perception. Q-CPTO improves the quality of CP by curtailing perception redundancy and increasing the Value of Information (VOI) procured by each user. We use Kalman filters (KFs) for VOI assessment, predicting the next movement of each vehicle to estimate its region of interest. The estimated VOI is then integrated into the task offloading problem. We formulate the task offloading problem as an Integer Linear Program (ILP) that maximizes the VOI of users and reduces perception redundancy by leveraging the spatially diverse fields of view (FOVs) of vehicles, while adhering to strict latency requirements. We also propose the Q-CPTO-Heuristic (Q-CPTOH) scheme to solve the task offloading problem in a time-efficient manner. Extensive evaluations show that Q-CPTO significantly outperforms prominent task offloading schemes by up to 14% and 20% in terms of response delay and traffic awareness, respectively. Furthermore, Q-CPTO-H closely approaches the optimal solution, with marginal gaps of up to 1.4% and 2.1% in terms of traffic awareness and the number of collaborating users, respectively, while reducing the runtime by up to 84%.
Read more6/3/2024

0
Enhanced Cooperative Perception for Autonomous Vehicles Using Imperfect Communication
Ahmad Sarlak, Hazim Alzorgan, Sayed Pedram Haeri Boroujeni, Abolfazl Razi, Rahul Amin
Sharing and joint processing of camera feeds and sensor measurements, known as Cooperative Perception (CP), has emerged as a new technique to achieve higher perception qualities. CP can enhance the safety of Autonomous Vehicles (AVs) where their individual visual perception quality is compromised by adverse weather conditions (haze as foggy weather), low illumination, winding roads, and crowded traffic. To cover the limitations of former methods, in this paper, we propose a novel approach to realize an optimized CP under constrained communications. At the core of our approach is recruiting the best helper from the available list of front vehicles to augment the visual range and enhance the Object Detection (OD) accuracy of the ego vehicle. In this two-step process, we first select the helper vehicles that contribute the most to CP based on their visual range and lowest motion blur. Next, we implement a radio block optimization among the candidate vehicles to further improve communication efficiency. We specifically focus on pedestrian detection as an exemplary scenario. To validate our approach, we used the CARLA simulator to create a dataset of annotated videos for different driving scenarios where pedestrian detection is challenging for an AV with compromised vision. Our results demonstrate the efficacy of our two-step optimization process in improving the overall performance of cooperative perception in challenging scenarios, substantially improving driving safety under adverse conditions. Finally, we note that the networking assumptions are adopted from LTE Release 14 Mode 4 side-link communication, commonly used for Vehicle-to-Vehicle (V2V) communication. Nonetheless, our method is flexible and applicable to arbitrary V2V communications.
Read more4/15/2024
0
Computation Pre-Offloading for MEC-Enabled Vehicular Networks via Trajectory Prediction
Ting Zhang, Bo Yang, Zhiwen Yu, Xuelin Cao, George C. Alexandropoulos, Yan Zhang, Chau Yuen
Task offloading is of paramount importance to efficiently orchestrate vehicular wireless networks, necessitating the availability of information regarding the current network status and computational resources. However, due to the mobility of the vehicles and the limited computational resources for performing task offloading in near-real-time, such schemes may require high latency, thus, become even infeasible. To address this issue, in this paper, we present a Trajectory Prediction-based Pre-offloading Decision (TPPD) algorithm for analyzing the historical trajectories of vehicles to predict their future coordinates, thereby allowing for computational resource allocation in advance. We first utilize the Long Short-Term Memory (LSTM) network model to predict each vehicle's movement trajectory. Then, based on the task requirements and the predicted trajectories, we devise a dynamic resource allocation algorithm using a Double Deep Q-Network (DDQN) that enables the edge server to minimize task processing delay, while ensuring effective utilization of the available computational resources. Our simulation results verify the effectiveness of the proposed approach, showcasing that, as compared with traditional real-time task offloading strategies, the proposed TPPD algorithm significantly reduces task processing delay while improving resource utilization.
Read more9/27/2024

0
SLO-Aware Task Offloading within Collaborative Vehicle Platoons
Boris Sedlak, Andrea Morichetta, Yuhao Wang, Yang Fei, Liang Wang, Schahram Dustdar, Xiaobo Qu
In the context of autonomous vehicles (AVs), offloading is essential for guaranteeing the execution of perception tasks, e.g., mobile mapping or object detection. While existing work focused extensively on minimizing inter-vehicle networking latency through offloading, other objectives become relevant in the case of vehicle platoons, e.g., energy efficiency or data quality for heavy-duty or public transport. Therefore, we aim to enforce these Service Level Objectives (SLOs) through intelligent task offloading within AV platoons. We present a collaborative framework for handling and offloading services in a purely Vehicle-to-Vehicle approach (V2V) based on Bayesian Networks (BNs). Each service aggregates local observations into a platoon-wide understanding of how to ensure SLOs for heterogeneous vehicle types. With the resulting models, services can proactively decide to offload if this promises to improve global SLO fulfillment. We evaluate the approach in a real-case setting, where vehicles in a platoon continuously (i.e., every 500 ms) interpret the SLOs of three actual perception services. Our probabilistic, predictive method shows promising results in handling large AV platoons; within seconds, it detects and resolves SLO violations through offloading.
Read more9/27/2024