SLO-Aware Task Offloading within Collaborative Vehicle Platoons

0

Sign in to get full access
Overview
- This paper explores a task offloading approach for collaborative vehicle platoons that considers Service Level Objectives (SLOs) to ensure reliable and efficient task execution.
- The proposed approach uses Bayesian networks to model the relationship between task characteristics, resource availability, and SLO requirements, enabling intelligent task offloading decisions.
- Experiments demonstrate the effectiveness of the SLO-aware task offloading in improving task completion rates and reducing latency compared to traditional approaches.
Plain English Explanation
In modern transportation, vehicles are increasingly forming collaborative platoons to share resources and improve efficiency. This paper focuses on how these platoons can offload computational tasks to nearby vehicles or edge computing resources in a way that meets specific Service Level Objectives (SLOs).
SLOs are targets set for the performance and reliability of a service, such as ensuring a task completes within a certain time frame or with a minimum level of accuracy. The researchers developed a system that uses Bayesian networks to model how task characteristics, available resources, and SLO requirements are related. This allows the platoon to intelligently decide which vehicle or edge resource should handle each task to best meet the SLOs.
Through experiments, the authors demonstrate that their SLO-aware task offloading approach outperforms traditional methods. It results in higher task completion rates and lower latency, ensuring the platoon can reliably execute computationally intensive tasks while meeting the required performance targets.
Technical Explanation
The key elements of the paper are:
-
SLO-Aware Task Offloading Framework: The authors propose a framework that considers SLOs when offloading tasks within a collaborative vehicle platoon. It uses Bayesian networks to model the complex relationships between task characteristics, resource availability, and SLO requirements.
-
Bayesian Network Model: The Bayesian network is trained to predict the likelihood of meeting SLOs based on factors such as task type, input data size, available computing power, and network conditions. This allows the framework to make informed decisions about where to offload each task.
-
Offloading Decision Algorithm: The paper outlines an algorithm that leverages the Bayesian network model to select the optimal target for offloading each task. It considers factors like expected latency, resource utilization, and SLO satisfaction probability to minimize SLO violations.
-
Experimental Evaluation: The authors conduct experiments using real-world traffic data and simulated vehicle platoons. They compare the SLO-aware offloading approach to traditional methods, demonstrating improvements in task completion rates, latency, and SLO satisfaction.
Critical Analysis
The paper presents a well-designed and thorough approach to SLO-aware task offloading in collaborative vehicle platoons. However, a few potential limitations and areas for further research are worth noting:
-
Model Complexity: The Bayesian network model used in the framework is relatively complex, which could make it computationally expensive to train and update in real-time. Simpler models may be worth exploring to balance accuracy and efficiency.
-
Heterogeneous Platoons: The paper assumes a homogeneous platoon, with vehicles having similar computing capabilities. Extending the approach to handle heterogeneous platoons could make it more realistic and applicable to a wider range of scenarios.
-
Dynamic Environments: The current framework does not explicitly address rapidly changing environmental conditions, such as sudden changes in network connectivity or resource availability. Incorporating mechanisms to handle dynamic environments could enhance the robustness of the offloading decisions.
-
Practical Deployment: While the simulation-based experiments demonstrate the potential benefits, further research is needed to address practical deployment challenges, such as integration with existing transportation management systems and adherence to industry standards and protocols.
Conclusion
This paper presents a novel approach to task offloading within collaborative vehicle platoons that considers Service Level Objectives (SLOs). By leveraging Bayesian networks to model the complex relationships between task characteristics, resource availability, and SLO requirements, the proposed framework can make intelligent offloading decisions to ensure reliable and efficient task execution. The experimental results showcase the effectiveness of the SLO-aware approach in improving task completion rates and reducing latency compared to traditional methods. While the framework has some limitations, it represents an important step towards enabling reliable and robust edge computing in intelligent transportation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
SLO-Aware Task Offloading within Collaborative Vehicle Platoons
Boris Sedlak, Andrea Morichetta, Yuhao Wang, Yang Fei, Liang Wang, Schahram Dustdar, Xiaobo Qu
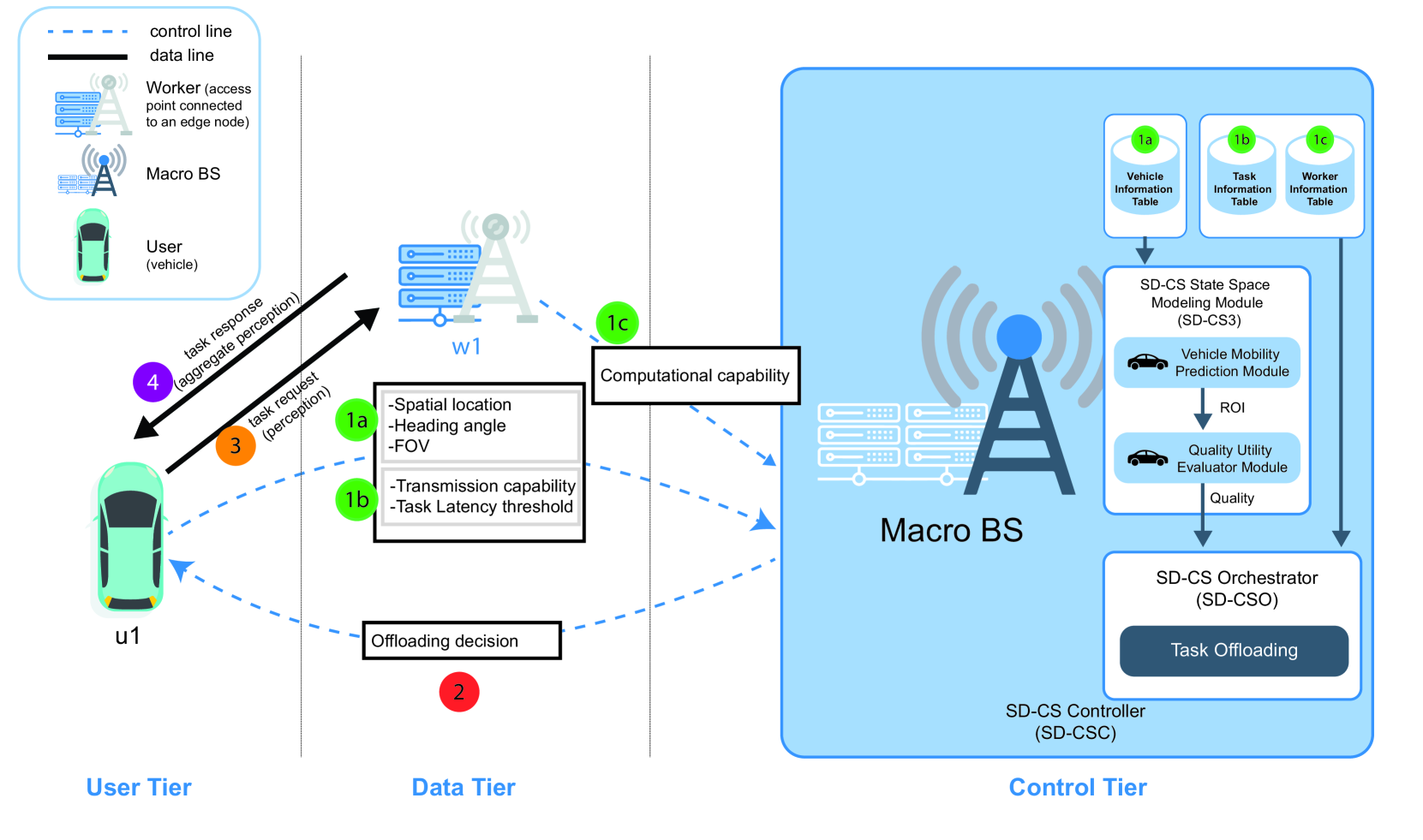
In the context of autonomous vehicles (AVs), offloading is essential for guaranteeing the execution of perception tasks, e.g., mobile mapping or object detection. While existing work focused extensively on minimizing inter-vehicle networking latency through offloading, other objectives become relevant in the case of vehicle platoons, e.g., energy efficiency or data quality for heavy-duty or public transport. Therefore, we aim to enforce these Service Level Objectives (SLOs) through intelligent task offloading within AV platoons. We present a collaborative framework for handling and offloading services in a purely Vehicle-to-Vehicle approach (V2V) based on Bayesian Networks (BNs). Each service aggregates local observations into a platoon-wide understanding of how to ensure SLOs for heterogeneous vehicle types. With the resulting models, services can proactively decide to offload if this promises to improve global SLO fulfillment. We evaluate the approach in a real-case setting, where vehicles in a platoon continuously (i.e., every 500 ms) interpret the SLOs of three actual perception services. Our probabilistic, predictive method shows promising results in handling large AV platoons; within seconds, it detects and resolves SLO violations through offloading.
Read more9/27/2024
0
Quality-Aware Task Offloading for Cooperative Perception in Vehicular Edge Computing
Amr M. Zaki, Sara A. Elsayed, Khalid Elgazzar, Hossam S. Hassanein
Task offloading in Vehicular Edge Computing (VEC) can advance cooperative perception (CP) to improve traffic awareness in Autonomous Vehicles. In this paper, we propose the Quality-aware Cooperative Perception Task Offloading (QCPTO) scheme. Q-CPTO is the first task offloading scheme that enhances traffic awareness by prioritizing the quality rather than the quantity of cooperative perception. Q-CPTO improves the quality of CP by curtailing perception redundancy and increasing the Value of Information (VOI) procured by each user. We use Kalman filters (KFs) for VOI assessment, predicting the next movement of each vehicle to estimate its region of interest. The estimated VOI is then integrated into the task offloading problem. We formulate the task offloading problem as an Integer Linear Program (ILP) that maximizes the VOI of users and reduces perception redundancy by leveraging the spatially diverse fields of view (FOVs) of vehicles, while adhering to strict latency requirements. We also propose the Q-CPTO-Heuristic (Q-CPTOH) scheme to solve the task offloading problem in a time-efficient manner. Extensive evaluations show that Q-CPTO significantly outperforms prominent task offloading schemes by up to 14% and 20% in terms of response delay and traffic awareness, respectively. Furthermore, Q-CPTO-H closely approaches the optimal solution, with marginal gaps of up to 1.4% and 2.1% in terms of traffic awareness and the number of collaborating users, respectively, while reducing the runtime by up to 84%.
Read more6/3/2024

0
Towards Safe and Robust Autonomous Vehicle Platooning: A Self-Organizing Cooperative Control Framework
Chengkai Xu, Zihao Deng, Jiaqi Liu, Chao Huang, Peng Hang
In the emerging hybrid traffic flow environment, which includes both human-driven vehicles (HDVs) and autonomous vehicles (AVs), ensuring safe and robust decision-making and control is crucial for the effective operation of autonomous vehicle platooning. Current systems for cooperative adaptive cruise control and lane changing are inadequate in responding to real-world emergency situations, limiting the potential of autonomous vehicle platooning technology. To address the aforementioned challenges, we propose a Twin-World Safety-Enhanced Data-Model-Knowledge Hybrid-Driven autonomous vehicle platooning Cooperative Control Framework. Within this framework, a deep reinforcement learning formation decision model integrating traffic priors is designed, and a twin-world deduction model based on safety priority judgment is proposed. Subsequently, an optimal control-based multi-scenario decision-control right adaptive switching mechanism is designed to achieve adaptive switching between data-driven and model-driven methods. Through simulation experiments and hardware-in-loop tests, our algorithm has demonstrated excellent performance in terms of safety, robustness, and flexibility. A detailed account of the validation results for the model can be found in url{https://perfectxu88.github.io/towardssafeandrobust.github.io/}.
Read more8/20/2024
0
Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles
Nazish Tahir, Ramviyas Parasuraman, Haijian Sun
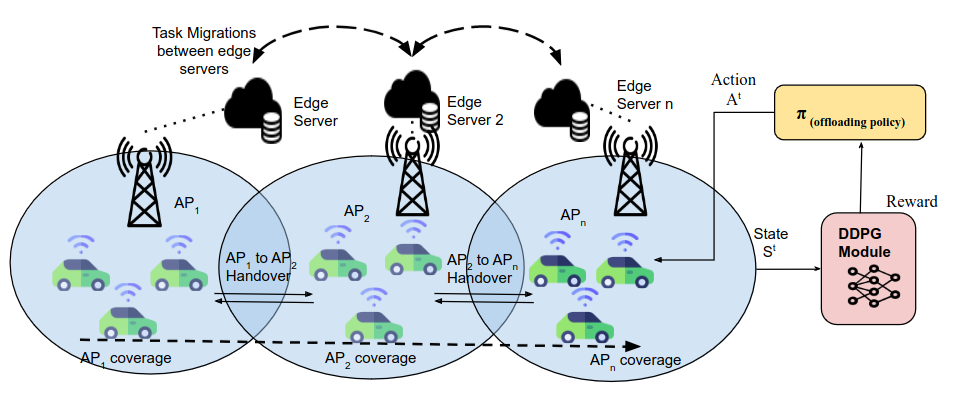
Offloading time-sensitive, computationally intensive tasks-such as advanced learning algorithms for autonomous driving-from vehicles to nearby edge servers, vehicle-to-infrastructure (V2I) systems, or other collaborating vehicles via vehicle-to-vehicle (V2V) communication enhances service efficiency. However, whence traversing the path to the destination, the vehicle's mobility necessitates frequent handovers among the access points (APs) to maintain continuous and uninterrupted wireless connections to maintain the network's Quality of Service (QoS). These frequent handovers subsequently lead to task migrations among the edge servers associated with the respective APs. This paper addresses the joint problem of task migration and access-point handover by proposing a deep reinforcement learning framework based on the Deep Deterministic Policy Gradient (DDPG) algorithm. A joint allocation method of communication and computation of APs is proposed to minimize computational load, service latency, and interruptions with the overarching goal of maximizing QoS. We implement and evaluate our proposed framework on simulated experiments to achieve smooth and seamless task switching among edge servers, ultimately reducing latency.
Read more8/9/2024