QuERLoc: Towards Next-Generation Localization with Quantum-Enhanced Ranging
2404.16895
0
0

Abstract
Remarkable advances have been achieved in localization techniques in past decades, rendering it one of the most important technologies indispensable to our daily lives. In this paper, we investigate a novel localization approach for future computing by presenting QuERLoc, the first study on localization using quantum-enhanced ranging. By fine-tuning the evolution of an entangled quantum probe, quantum ranging can output the information integrated in the probe as a specific mapping of distance-related parameters. QuERLoc is inspired by this unique property to measure a special combination of distances between a target sensor and multiple anchors within one single physical measurement. Leveraging this capability, QuERLoc settles two drawbacks of classical localization approaches: (i) the target-anchor distances must be measured individually and sequentially, and (ii) the resulting optimization problems are non-convex and are sensitive to noise. We first present the theoretical formulation of preparing the probing quantum state and controlling its dynamic to induce a convexified localization problem, and then solve it efficiently via optimization. We conduct extensive numerical analysis of QuERLoc under various settings. The results show that QuERLoc consistently outperforms classical approaches in accuracy and closely follows the theoretical lowerbound, while maintaining low time complexity. It achieves a minimum reduction of 73% in RMSE and 97.6% in time consumption compared to baselines. By introducing range-based quantum localization to the mobile computing community and showing its superior performance, QuERLoc sheds light on next-generation localization technologies and opens up new directions for future research.
Create account to get full access
Overview
- Presents a new quantum-enhanced localization system called QuERLoc that aims to improve the accuracy and reliability of positioning and tracking
- Leverages the unique properties of quantum systems to enhance the ranging capabilities of traditional radio-frequency (RF) localization techniques
- Proposes novel quantum-enhanced ranging algorithms and hardware designs to achieve next-generation localization performance
Plain English Explanation
QuERLoc: Towards Next-Generation Localization with Quantum-Enhanced Ranging is a research paper that introduces a new approach to localization, which is the process of determining the position and location of objects or devices. The researchers behind this work have developed a system called QuERLoc that uses quantum mechanics to enhance the accuracy and reliability of traditional radio-frequency (RF) localization techniques.
Existing RF localization methods, such as those used in GPS or indoor positioning systems, have limitations in terms of precision and robustness, especially in challenging environments like urban areas or indoor settings. The QuERLoc system aims to address these limitations by leveraging the unique properties of quantum systems, such as their ability to encode and transmit information with high precision.
By developing novel quantum-enhanced ranging algorithms and hardware designs, the researchers believe they can achieve significant improvements in localization performance compared to traditional approaches. This could have important implications for a wide range of applications, from autonomous vehicles and drones to indoor navigation and asset tracking.
Technical Explanation
QuERLoc: Towards Next-Generation Localization with Quantum-Enhanced Ranging proposes a new approach to localization that combines traditional RF techniques with quantum-enhanced ranging. The key elements of the QuERLoc system include:
-
Quantum-enhanced ranging algorithms: The researchers have developed novel algorithms that exploit the properties of quantum systems, such as entanglement and superposition, to improve the accuracy and precision of distance measurements between the target and reference nodes.
-
Quantum-enhanced hardware design: The QuERLoc system incorporates specialized hardware components, such as quantum light sources and detectors, to enable the implementation of the quantum-enhanced ranging algorithms.
-
Integrated localization framework: The quantum-enhanced ranging capabilities are seamlessly integrated into a comprehensive localization framework, allowing for the accurate and reliable positioning and tracking of targets in various environments.
The researchers have conducted extensive simulations and experiments to evaluate the performance of the QuERLoc system, comparing it to traditional RF localization methods. The results demonstrate significant improvements in terms of localization accuracy, robustness to environmental factors, and resilience to interference.
Critical Analysis
The QuERLoc: Towards Next-Generation Localization with Quantum-Enhanced Ranging paper presents a promising approach to enhancing the capabilities of localization systems, but it also acknowledges several challenges and limitations that need to be addressed.
One key challenge is the complexity and cost associated with implementing the quantum-enhanced hardware components required for the QuERLoc system. The researchers note that the specialized equipment, such as quantum light sources and detectors, may be prohibitively expensive for widespread deployment in some applications.
Additionally, the paper highlights the need for further research and development to improve the scalability and robustness of the quantum-enhanced ranging algorithms. While the initial results are encouraging, the performance of the system in real-world scenarios with various environmental factors and interference sources requires more extensive evaluation.
Another potential concern is the integration of the QuERLoc system with existing localization infrastructure and its compatibility with legacy devices and protocols. The researchers acknowledge the need for a seamless transition and interoperability to ensure widespread adoption.
Despite these challenges, the QuERLoc: Towards Next-Generation Localization with Quantum-Enhanced Ranging paper presents a compelling vision for the future of localization, where the unique properties of quantum systems can be harnessed to achieve unprecedented levels of accuracy, reliability, and resilience. Continued research and development in this area could lead to transformative advancements in a wide range of applications, from autonomous vehicles and smart cities to indoor navigation and asset tracking.
Conclusion
QuERLoc: Towards Next-Generation Localization with Quantum-Enhanced Ranging proposes a innovative approach to localization that leverages the unique capabilities of quantum systems to enhance the performance of traditional RF-based techniques. By developing novel quantum-enhanced ranging algorithms and specialized hardware designs, the researchers aim to push the boundaries of what is possible in terms of positioning accuracy, reliability, and resilience.
While the proposed QuERLoc system faces some challenges, such as the complexity and cost of the required quantum hardware, the potential benefits of this technology are significant. Improved localization capabilities could have far-reaching implications for a wide range of applications, from autonomous vehicles and smart infrastructure to indoor navigation and asset tracking.
As research in this area continues, it will be interesting to see how the QuERLoc system and similar quantum-enhanced localization approaches evolve and potentially become integrated into the next generation of positioning and tracking technologies. The ability to harness the unique properties of quantum systems could be a key driver of transformative advancements in the field of localization.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔄
XRLoc: Accurate UWB Localization to Realize XR Deployments
Aditya Arun, Shunsuke Saruwatari, Sureel Shah, Dinesh Bharadia
0
0
Understanding the location of ultra-wideband (UWB) tag-attached objects and people in the real world is vital to enabling a smooth cyber-physical transition. However, most UWB localization systems today require multiple anchors in the environment, which can be very cumbersome to set up. In this work, we develop XRLoc, providing an accuracy of a few centimeters in many real-world scenarios. This paper will delineate the key ideas which allow us to overcome the fundamental restrictions that plague a single anchor point from localization of a device to within an error of a few centimeters. We deploy a VR chess game using everyday objects as a demo and find that our system achieves $2.4$ cm median accuracy and $5.3$ cm $90^mathrm{th}$ percentile accuracy in dynamic scenarios, performing at least $8times$ better than state-of-art localization systems. Additionally, we implement a MAC protocol to furnish these locations for over $10$ tags at update rates of $100$ Hz, with a localization latency of $sim 1$ ms.
5/6/2024
🎯
Cooperative Relative Localization in MAV Swarms with Ultra-wideband Ranging
Changrui Liu, Sven U. Pfeiffer, Guido C. H. E. de Croon
0
0
Relative localization (RL) is essential for the successful operation of micro air vehicle (MAV) swarms. Achieving accurate 3-D RL in infrastructure-free and GPS-denied environments with only distance information is a challenging problem that has not been satisfactorily solved. In this work, based on the range-based peer-to-peer RL using the ultra-wideband (UWB) ranging technique, we develop a novel UWB-based cooperative relative localization (CRL) solution that integrates the relative motion dynamics of each host-neighbor pair to build a unified dynamic model and takes the distances between the neighbors as textit{bonus information}. Observability analysis using differential geometry shows that the proposed CRL scheme can expand the observable subspace compared to other alternatives using only direct distances between the host agent and its neighbors. In addition, we apply the kernel-induced extended Kalman filter (EKF) to the CRL state estimation problem with the novel-designed Logarithmic-Versoria (LV) kernel to tackle heavy-tailed UWB noise. Sufficient conditions for the convergence of the fixed-point iteration involved in the estimation algorithm are also derived. Comparative Monte Carlo simulations demonstrate that the proposed CRL scheme combined with the LV-kernel EKF significantly improves the estimation accuracy owing to its robustness against both measurement outliers and incorrect measurement covariance matrix initialization. Moreover, with the LV kernel, the estimation is still satisfactory when performing the fixed-point iteration only once for reduced computational complexity.
5/29/2024
Towards Optimal Beacon Placement for Range-Aided Localization
Ethan Sequeira, Hussein Saad, Stephen Kelly, Matthew Giamou
0
0
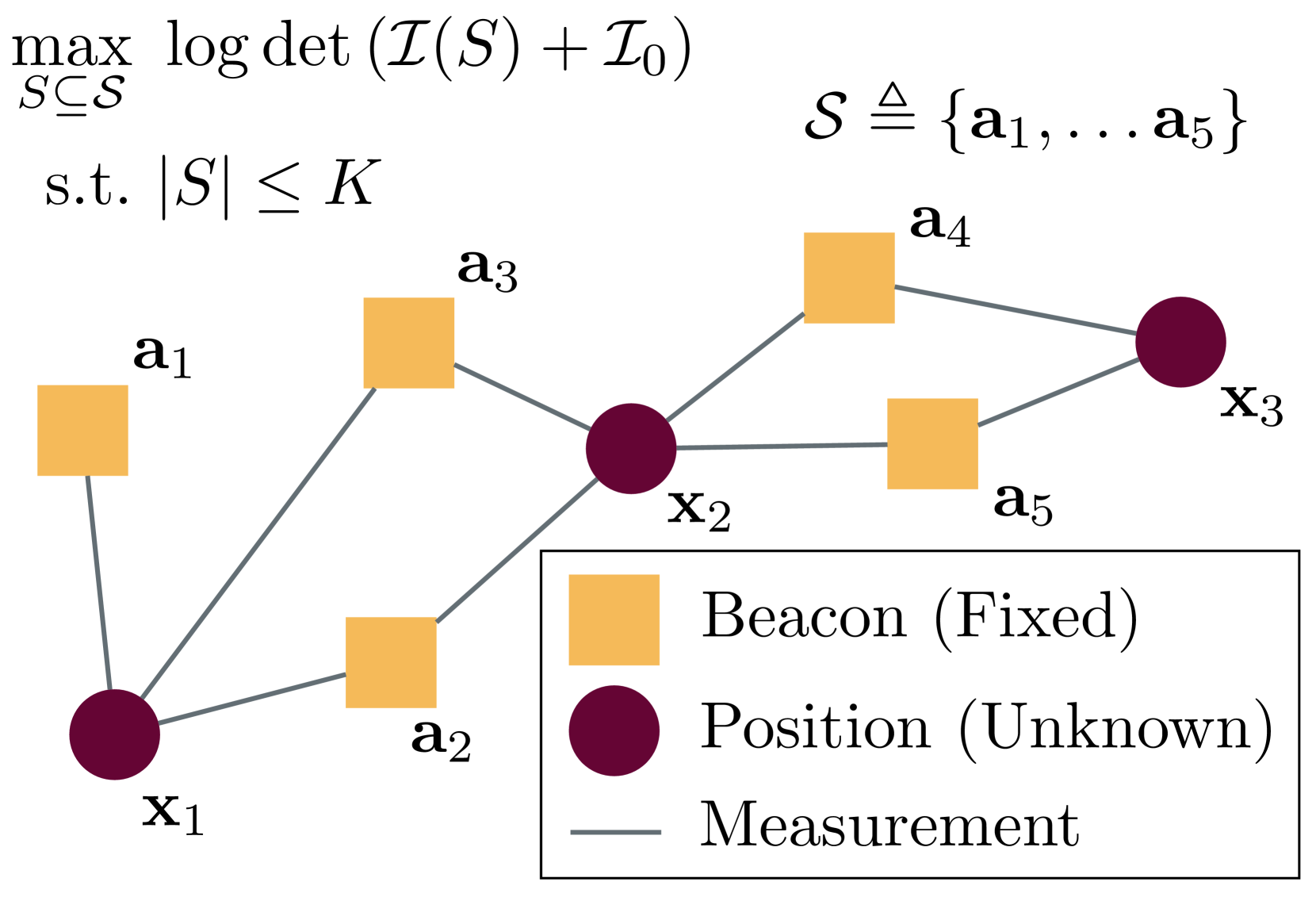
Range-based localization is ubiquitous: global navigation satellite systems (GNSS) power mobile phone-based navigation, and autonomous mobile robots can use range measurements from a variety of modalities including sonar, radar, and even WiFi signals. Many of these localization systems rely on fixed anchors or beacons with known positions acting as transmitters or receivers. In this work, we answer a fundamental question: given a set of positions we would like to localize, how should beacons be placed so as to minimize localization error? Specifically, we present an information theoretic method for optimally selecting an arrangement consisting of a few beacons from a large set of candidate positions. By formulating localization as maximum a posteriori (MAP) estimation, we can cast beacon arrangement as a submodular set function maximization problem. This approach is probabilistically rigorous, simple to implement, and extremely flexible. Furthermore, we prove that the submodular structure of our problem formulation ensures that a greedy algorithm for beacon arrangement has suboptimality guarantees. We compare our method with a number of benchmarks on simulated data and release an open source Python implementation of our algorithm and experiments.
5/21/2024

Multi-Robot Collaborative Localization and Planning with Inter-Ranging
Derek Knowles, Adam Dai, Grace Gao
0
0
Robots often use feature-based image tracking to identify their position in their surrounding environment; however, feature-based image tracking is prone to errors in low-textured and poorly lit environments. Specifically, we investigate a scenario where robots are tasked with exploring the surface of the Moon and are required to have an accurate estimate of their position to be able to correctly geotag scientific measurements. To reduce localization error, we complement traditional feature-based image tracking with ultra-wideband (UWB) distance measurements between the robots. The robots use an advanced mesh-ranging protocol that allows them to continuously share distance measurements amongst each other rather than relying on the common anchor and tag UWB architecture. We develop a decentralized multi-robot coordination algorithm that actively plans paths based on measurement line-of-sight vectors amongst all robots to minimize collective localization error. We then demonstrate the emergent behavior of the proposed multi-robot coordination algorithm both in simulation and hardware to lower a geometry-based uncertainty metric and reduce localization error.
6/26/2024