Towards Optimal Beacon Placement for Range-Aided Localization
2405.11550
0
0
Abstract
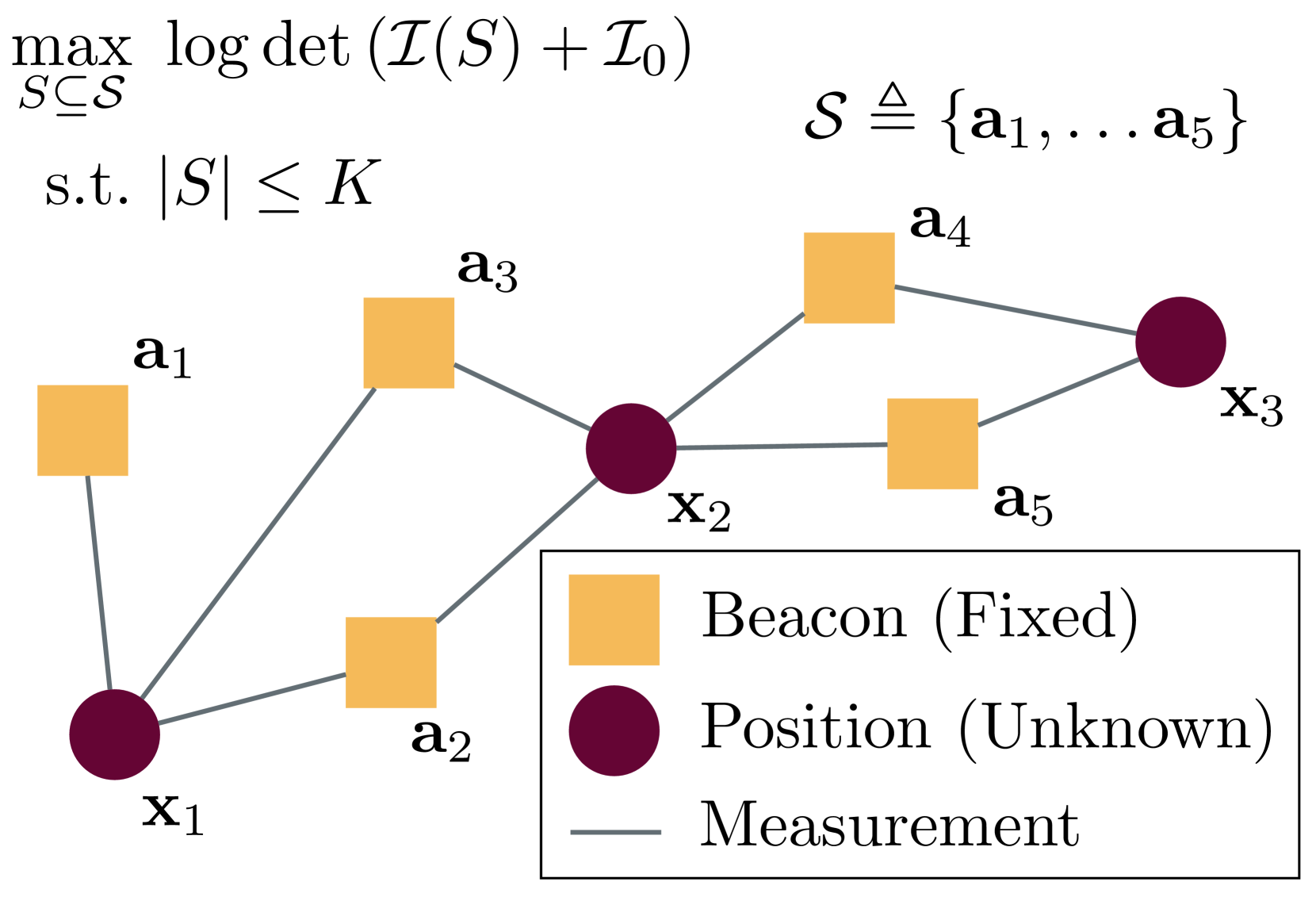
Range-based localization is ubiquitous: global navigation satellite systems (GNSS) power mobile phone-based navigation, and autonomous mobile robots can use range measurements from a variety of modalities including sonar, radar, and even WiFi signals. Many of these localization systems rely on fixed anchors or beacons with known positions acting as transmitters or receivers. In this work, we answer a fundamental question: given a set of positions we would like to localize, how should beacons be placed so as to minimize localization error? Specifically, we present an information theoretic method for optimally selecting an arrangement consisting of a few beacons from a large set of candidate positions. By formulating localization as maximum a posteriori (MAP) estimation, we can cast beacon arrangement as a submodular set function maximization problem. This approach is probabilistically rigorous, simple to implement, and extremely flexible. Furthermore, we prove that the submodular structure of our problem formulation ensures that a greedy algorithm for beacon arrangement has suboptimality guarantees. We compare our method with a number of benchmarks on simulated data and release an open source Python implementation of our algorithm and experiments.
Create account to get full access
Overview
- This paper explores the problem of optimal beacon placement for range-aided localization systems, which are used to determine the location of objects or devices based on the distance measurements between the object and multiple beacons.
- The authors propose a nonlinear optimization approach to find the optimal positions of the beacons that minimize the localization error.
- The paper includes a numerical evaluation of the proposed method using simulations and compares it to other beacon placement strategies.
Plain English Explanation
The paper focuses on range-aided localization systems. These systems use a set of reference points, called beacons, to determine the location of an object or device. They do this by measuring the distance between the object and each beacon, and then using these distance measurements to calculate the object's position.
The key challenge the authors address is how to optimally place the beacons to minimize the error in the final localization result. They propose using a mathematical optimization approach to find the best positions for the beacons.
The idea is that by carefully positioning the beacons, you can improve the accuracy of the distance measurements and, in turn, the overall localization accuracy. This is important in applications where precise location information is critical, such as in autonomous vehicles or indoor navigation.
Technical Explanation
The authors formulate the beacon placement problem as a nonlinear optimization problem, where the goal is to find the beacon positions that minimize the localization error. They use a combination of analytical and numerical techniques to solve this optimization problem.
First, the authors derive a mathematical expression for the localization error based on the beacon positions and the object's true location. They then use this error function to define the objective function for the optimization problem.
Next, the authors propose a gradient-based optimization algorithm to solve the problem. This algorithm iteratively adjusts the beacon positions to reduce the localization error, using the gradient of the error function with respect to the beacon coordinates.
The authors also explore the impact of different factors on the optimal beacon placement, such as the number of beacons, the size of the coverage area, and the noise in the distance measurements.
Critical Analysis
The authors provide a thorough analysis of their proposed approach and compare it to other beacon placement strategies, such as uniform and random placement. They demonstrate the effectiveness of their method through numerical simulations and show that it can significantly improve localization accuracy compared to these alternative approaches.
However, the paper does not address some practical considerations, such as the feasibility of physically implementing the optimal beacon locations or the impact of obstacles or interference on the distance measurements. Additionally, the authors assume that the object's true location is known, which may not be the case in real-world applications.
Further research could explore the robustness of the proposed approach to these practical challenges and investigate ways to integrate the beacon placement optimization with the actual localization algorithms used in the system.
Conclusion
This paper presents a novel approach to optimizing the placement of beacons in range-aided localization systems. By formulating the problem as a nonlinear optimization and using a gradient-based algorithm, the authors demonstrate that they can significantly improve the accuracy of the localization results compared to other beacon placement strategies.
The proposed method has the potential to enhance the performance of a wide range of applications that rely on precise location information, from autonomous vehicles to indoor navigation systems. Further research to address the practical limitations and integrate the beacon placement optimization with the localization algorithms could lead to even more robust and effective solutions in this field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Multi-Robot Collaborative Localization and Planning with Inter-Ranging
Derek Knowles, Adam Dai, Grace Gao
0
0
Robots often use feature-based image tracking to identify their position in their surrounding environment; however, feature-based image tracking is prone to errors in low-textured and poorly lit environments. Specifically, we investigate a scenario where robots are tasked with exploring the surface of the Moon and are required to have an accurate estimate of their position to be able to correctly geotag scientific measurements. To reduce localization error, we complement traditional feature-based image tracking with ultra-wideband (UWB) distance measurements between the robots. The robots use an advanced mesh-ranging protocol that allows them to continuously share distance measurements amongst each other rather than relying on the common anchor and tag UWB architecture. We develop a decentralized multi-robot coordination algorithm that actively plans paths based on measurement line-of-sight vectors amongst all robots to minimize collective localization error. We then demonstrate the emergent behavior of the proposed multi-robot coordination algorithm both in simulation and hardware to lower a geometry-based uncertainty metric and reduce localization error.
6/26/2024
Adaptive Anchor Pairs Selection in a TDOA-based System Through Robot Localization Error Minimization
Marcin Kolakowski
0
0
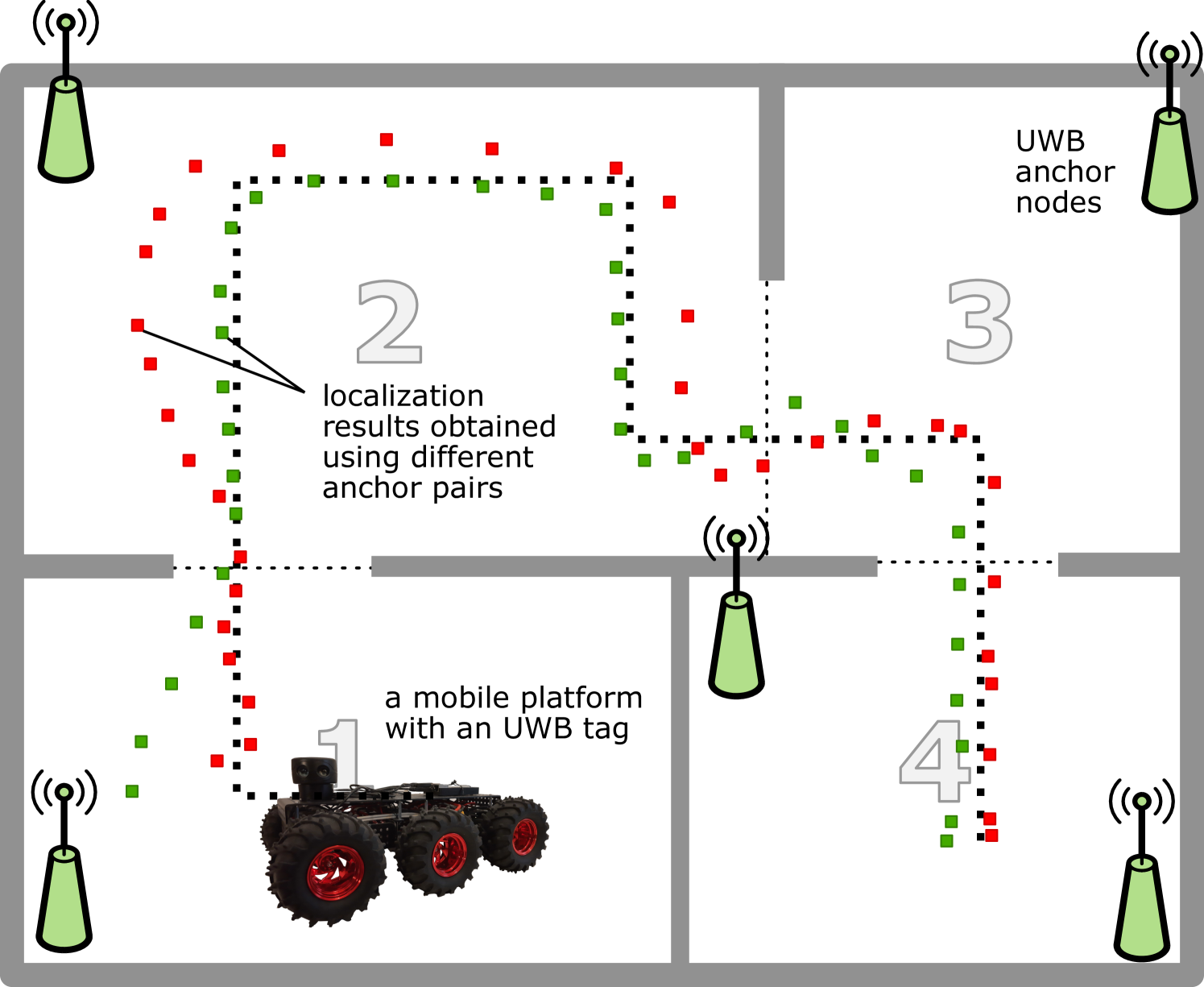
The following paper presents an adaptive anchor pairs selection method for ultra-wideband (UWB) Time Difference of Arrival (TDOA) based positioning systems. The method divides the area covered by the system into several zones and assigns them anchor pair sets. The pair sets are determined during calibration based on localization root mean square error (RMSE). The calibration assumes driving a mobile platform equipped with a LiDAR sensor and a UWB tag through the specified zones. The robot is localized separately based on a large set of different TDOA pairs and using a LiDAR, which acts as the reference. For each zone, the TDOA pairs set for which the registered RMSE is lowest is selected and used for localization in the routine system work. The proposed method has been tested with simulations and experiments. The results for both simulated static and experimental dynamic scenarios have proven that the adaptive selection of the anchor nodes leads to an increase in localization accuracy. In the experiment, the median trajectory error for a moving person localization was at a level of 25 cm.
4/9/2024
Kalman filter based localization in hybrid BLE-UWB positioning system
Marcin Kolakowski
0
0
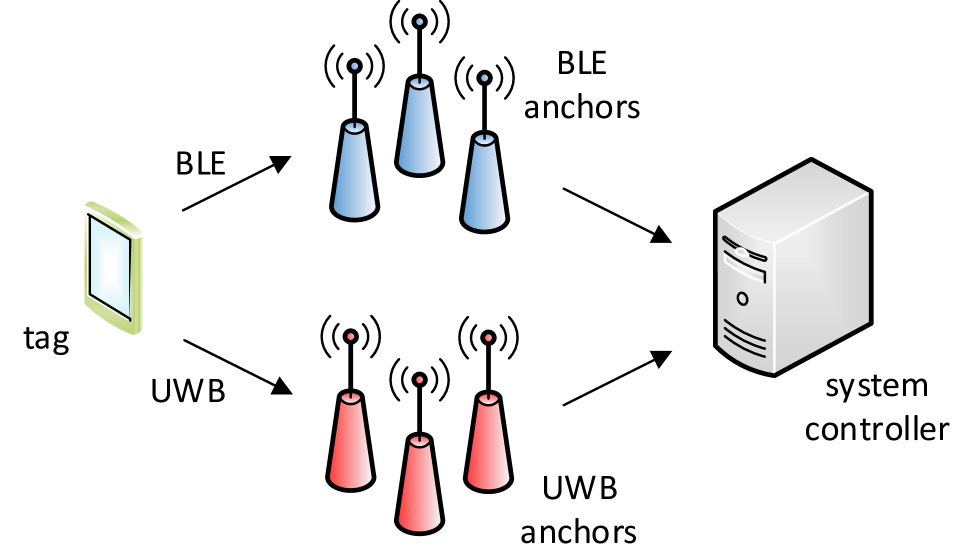
In this paper a concept of hybrid Bluetooth Low Energy (BLE) Ultra-wideband (UWB) positioning system is presented. The system is intended to be energy efficient. Low energy BLE unit is used as a primary source of measurement data and for most of the time localization is calculated based on received signal strength (RSS). UWB technology is used less often. Time difference of arrival (TDOA) values measured with UWB radios are periodically used to improve RSS based localization. The paper contains a description of proposed hybrid positioning algorithm. Results of simulations and experiments confirming algorithm's efficiency are also included.
4/4/2024

Probabilistic positioning via ray tracing with noisy angle of arrival measurements
Vincent Corlay, Viet-Hoa Nguyen, Nicolas Gresset
0
0
We consider the positioning problem in non line-of-sight (NLoS) situations, where several base stations (BS) try to locate a user equipment (UE) based on uplink angle of arrival (AoA) measurements and a digital twin of the environment. Ray launching in a Monte Carlo manner according to the AoA statistics enables to produce a map of points for each BS. These points represent the intersections of the rays with a xy plane at a given user equipment (UE) elevation. We propose to fit a parametric probability density function (pdf), such as a Gaussian mixture model (GMM), to each map of points. Multiplying the obtained pdfs for each BS enables to compute the position probability of the UE. This approach yields an algorithm robust to a reduced number of launched rays. Moreover, these parametric pdfs may be fitted and stored in an offline phase such that ray tracing can be avoided in the online phase. This significantly reduces the computational complexity of the positioning method.
4/4/2024