XRLoc: Accurate UWB Localization to Realize XR Deployments
2307.12512
0
0
🔄
Abstract
Understanding the location of ultra-wideband (UWB) tag-attached objects and people in the real world is vital to enabling a smooth cyber-physical transition. However, most UWB localization systems today require multiple anchors in the environment, which can be very cumbersome to set up. In this work, we develop XRLoc, providing an accuracy of a few centimeters in many real-world scenarios. This paper will delineate the key ideas which allow us to overcome the fundamental restrictions that plague a single anchor point from localization of a device to within an error of a few centimeters. We deploy a VR chess game using everyday objects as a demo and find that our system achieves $2.4$ cm median accuracy and $5.3$ cm $90^mathrm{th}$ percentile accuracy in dynamic scenarios, performing at least $8times$ better than state-of-art localization systems. Additionally, we implement a MAC protocol to furnish these locations for over $10$ tags at update rates of $100$ Hz, with a localization latency of $sim 1$ ms.
Create account to get full access
Overview
- Accurately locating ultra-wideband (UWB) tagged objects and people is critical for smooth integration of the physical and digital worlds.
- Most existing UWB localization systems require multiple anchors, which can be difficult to set up.
- This work introduces XRLoc, a system that can achieve centimeter-level accuracy with a single anchor in many real-world scenarios.
Plain English Explanation
The ability to precisely track the location of objects and people that are tagged with ultra-wideband (UWB) technology is essential for bridging the gap between the physical and digital realms. However, most current UWB localization systems need multiple fixed reference points, called anchors, to be installed in the environment. This can be a cumbersome and time-consuming process.
The researchers behind this paper have developed a new system called XRLoc that is able to achieve accuracy within a few centimeters using just a single anchor. This is a significant improvement over existing state-of-the-art localization systems, which typically require multiple anchors to reach a similar level of precision.
To demonstrate the capabilities of XRLoc, the researchers implemented a virtual reality chess game that uses everyday objects as game pieces. They found that XRLoc achieved a median accuracy of 2.4 cm and a 90th percentile accuracy of 5.3 cm in dynamic scenarios, outperforming other localization systems by at least 8 times.
Additionally, the researchers developed a communication protocol that allows XRLoc to track the locations of more than 10 tags at update rates of 100 Hz, with a localization latency of around 1 millisecond. This high-speed, low-latency performance is critical for enabling smooth, responsive interactions in cyber-physical applications.
Technical Explanation
The key insights that allow XRLoc to overcome the fundamental limitations of single-anchor localization are detailed in this paper. The researchers leverage a combination of Kalman filter-based localization, utilizing acceleration measurements, and error mitigation techniques to achieve centimeter-level accuracy with a single anchor.
The system architecture includes a single UWB anchor that communicates with tags attached to objects or people. XRLoc uses time-difference-of-arrival (TDOA) measurements between the anchor and tags to estimate their positions. To enhance the accuracy, the researchers incorporate acceleration data from the tags, which helps to track their motion more precisely.
Additionally, the paper presents a novel medium access control (MAC) protocol that enables the localization of more than 10 tags at update rates of 100 Hz, with a latency of around 1 ms. This high-performance communication system is crucial for enabling responsive and seamless cyber-physical interactions.
Critical Analysis
The researchers acknowledge several caveats and limitations of their work. For example, they note that the system's accuracy may degrade in environments with significant multipath effects or obstructions. Additionally, the paper does not address the potential impact of tag orientation on localization accuracy.
One area for further research could be to investigate the integration of quantum-enhanced localization techniques to further improve the precision and robustness of XRLoc. Additionally, the researchers could explore semi-supervised novelty detection approaches to enhance the system's ability to handle unexpected scenarios.
Overall, the XRLoc system represents a significant advancement in single-anchor UWB localization, paving the way for more seamless integration of the physical and digital worlds. However, as with any research, it is essential for readers to think critically about the presented work and form their own conclusions about its merits and limitations.
Conclusion
This paper introduces XRLoc, a novel UWB localization system that can achieve centimeter-level accuracy using a single anchor in many real-world scenarios. The key innovations behind XRLoc, including its use of Kalman filtering, acceleration data, and a high-performance communication protocol, allow it to outperform existing state-of-the-art localization systems by a wide margin.
The demonstrated capabilities of XRLoc, such as its ability to track multiple tags at high update rates with low latency, have significant implications for the development of smooth and responsive cyber-physical applications. As the digital and physical worlds continue to converge, systems like XRLoc will play an increasingly important role in enabling seamless integration and interaction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Multi-Robot Collaborative Localization and Planning with Inter-Ranging
Derek Knowles, Adam Dai, Grace Gao
0
0
Robots often use feature-based image tracking to identify their position in their surrounding environment; however, feature-based image tracking is prone to errors in low-textured and poorly lit environments. Specifically, we investigate a scenario where robots are tasked with exploring the surface of the Moon and are required to have an accurate estimate of their position to be able to correctly geotag scientific measurements. To reduce localization error, we complement traditional feature-based image tracking with ultra-wideband (UWB) distance measurements between the robots. The robots use an advanced mesh-ranging protocol that allows them to continuously share distance measurements amongst each other rather than relying on the common anchor and tag UWB architecture. We develop a decentralized multi-robot coordination algorithm that actively plans paths based on measurement line-of-sight vectors amongst all robots to minimize collective localization error. We then demonstrate the emergent behavior of the proposed multi-robot coordination algorithm both in simulation and hardware to lower a geometry-based uncertainty metric and reduce localization error.
6/26/2024
🎯
Cooperative Relative Localization in MAV Swarms with Ultra-wideband Ranging
Changrui Liu, Sven U. Pfeiffer, Guido C. H. E. de Croon
0
0
Relative localization (RL) is essential for the successful operation of micro air vehicle (MAV) swarms. Achieving accurate 3-D RL in infrastructure-free and GPS-denied environments with only distance information is a challenging problem that has not been satisfactorily solved. In this work, based on the range-based peer-to-peer RL using the ultra-wideband (UWB) ranging technique, we develop a novel UWB-based cooperative relative localization (CRL) solution that integrates the relative motion dynamics of each host-neighbor pair to build a unified dynamic model and takes the distances between the neighbors as textit{bonus information}. Observability analysis using differential geometry shows that the proposed CRL scheme can expand the observable subspace compared to other alternatives using only direct distances between the host agent and its neighbors. In addition, we apply the kernel-induced extended Kalman filter (EKF) to the CRL state estimation problem with the novel-designed Logarithmic-Versoria (LV) kernel to tackle heavy-tailed UWB noise. Sufficient conditions for the convergence of the fixed-point iteration involved in the estimation algorithm are also derived. Comparative Monte Carlo simulations demonstrate that the proposed CRL scheme combined with the LV-kernel EKF significantly improves the estimation accuracy owing to its robustness against both measurement outliers and incorrect measurement covariance matrix initialization. Moreover, with the LV kernel, the estimation is still satisfactory when performing the fixed-point iteration only once for reduced computational complexity.
5/29/2024
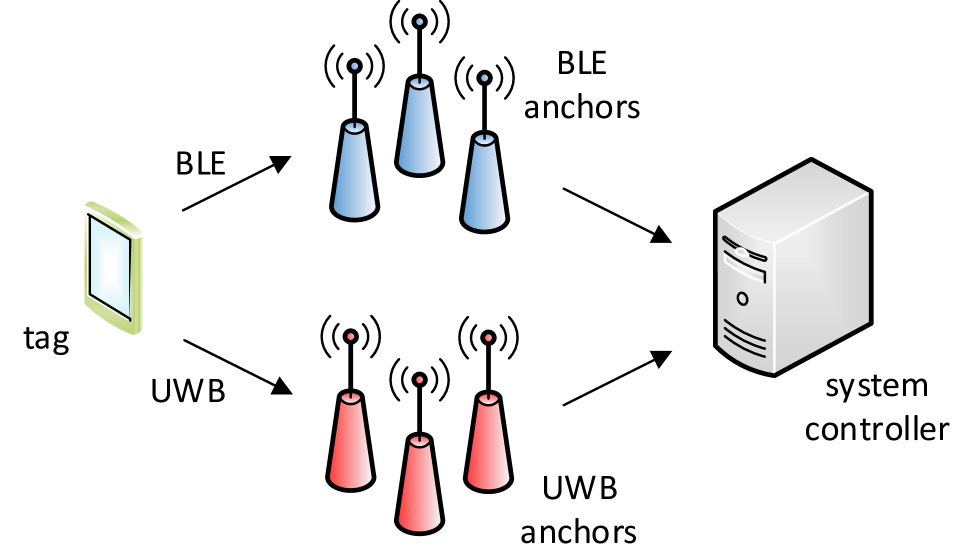
Kalman filter based localization in hybrid BLE-UWB positioning system
Marcin Kolakowski
0
0
In this paper a concept of hybrid Bluetooth Low Energy (BLE) Ultra-wideband (UWB) positioning system is presented. The system is intended to be energy efficient. Low energy BLE unit is used as a primary source of measurement data and for most of the time localization is calculated based on received signal strength (RSS). UWB technology is used less often. Time difference of arrival (TDOA) values measured with UWB radios are periodically used to improve RSS based localization. The paper contains a description of proposed hybrid positioning algorithm. Results of simulations and experiments confirming algorithm's efficiency are also included.
4/4/2024
❗
Utilizing acceleration measurements to improve TDOA based localization
Marcin Kolakowski
0
0
In this paper localization using UWB positioning system and an inertial unit containing a single accelerometer is considered. The main part of the paper describes a novel algorithm for person localization. The algorithm is based on modified Extended Kalman Filter and utilizes TDOA (Time Difference of Arrival) results obtained from UWB system and results of acceleration measurement performed by the localized tag device. The proposed algorithm has been experimentally investigated through simulation and experiments. The results are included in the paper.
4/1/2024