Re-Invoke: Tool Invocation Rewriting for Zero-Shot Tool Retrieval

0
➖
Sign in to get full access
Overview
- Large language models (LLMs) have enabled autonomous agents with complex reasoning and task-fulfillment capabilities using a wide range of tools.
- Effectively identifying the most relevant tools for a given task becomes a key bottleneck as the toolset size grows, hindering reliable tool utilization.
- To address this, the researchers introduce Re-Invoke, an unsupervised tool retrieval method designed to scale effectively to large toolsets without training.
Plain English Explanation
Re-Invoke is a new way to help autonomous agents, like AI assistants, find the most relevant tools to complete a task. As the number of available tools grows, it becomes increasingly difficult for these agents to quickly identify the best tools to use.
The researchers developed Re-Invoke to address this challenge. It works by first generating a diverse set of example queries that cover different aspects of the tools. Then, when a user asks the agent for help, Re-Invoke can understand the user's intent and match it to the most relevant tools, even in a large toolset.
This is all done without the need for any special training. Re-Invoke leverages the natural language understanding capabilities of large language models to figure out what the user needs and pair it with the right tools. The researchers found that this approach significantly outperforms other methods, especially when trying to identify multiple relevant tools for a single task.
Technical Explanation
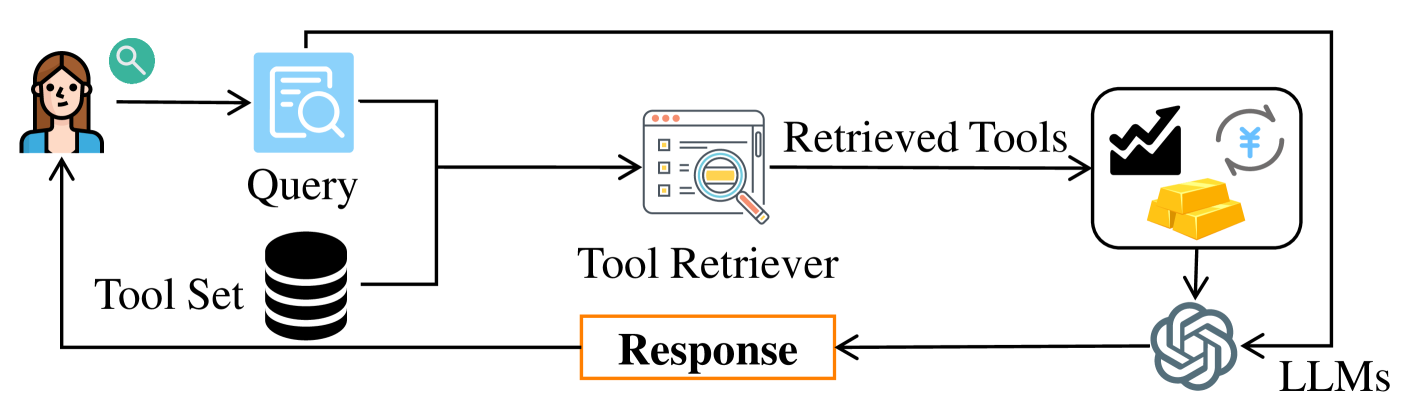
The core idea behind Re-Invoke is to use an unsupervised approach to effectively retrieve the most relevant tools for a given task, even as the tool set grows larger. The key steps are:
-
Diverse Synthetic Query Generation: During the tool indexing phase, the researchers generate a diverse set of synthetic queries that comprehensively cover different aspects of the query space associated with each tool document. This helps build a robust understanding of the tool capabilities.
-
Intent-Aware Query Understanding: When a user query comes in, Re-Invoke leverages the query understanding capabilities of large language models to extract key tool-related context and underlying intents. This allows it to better match the user's needs to the available tools.
-
Multi-View Similarity Ranking: Finally, Re-Invoke employs a novel multi-view similarity ranking strategy based on the extracted intents. This helps pinpoint the most relevant tools for each user query, even in complex, multi-tool scenarios.
The researchers evaluated Re-Invoke on standard benchmark datasets and found that it significantly outperforms state-of-the-art alternatives. Specifically, it achieved a 20% relative improvement in nDCG@5 for single-tool retrieval and a 39% improvement for multi-tool retrieval, all within a fully unsupervised setting.
Critical Analysis
While the Re-Invoke approach shows promising results, there are a few potential limitations and areas for further research:
-
Generalization to Broader Domains: The evaluation was primarily conducted on tool-related datasets. It would be valuable to assess the performance of Re-Invoke on more diverse query types and domains to ensure its broader applicability.
-
Handling Dynamic Tool Updates: As new tools are developed, the researchers note that Re-Invoke would need to be periodically re-indexed to maintain its effectiveness. Exploring methods to more efficiently handle dynamic tool updates could further improve its real-world usability.
-
Interpretability and Explainability: The paper does not provide much insight into the internal decision-making processes of Re-Invoke. Enhancing the interpretability and explainability of the tool retrieval process could help users better understand and trust the system's recommendations.
-
Ethical Considerations: As autonomous agents with powerful tool-usage capabilities become more ubiquitous, it is important to carefully consider the potential ethical implications, such as the risk of misuse or unintended consequences. Proactive measures to address these concerns would be valuable.
Overall, the Re-Invoke approach represents an important step forward in scaling tool retrieval for large language model-powered autonomous agents. Further research to address the above limitations could help unlock even more robust and reliable tool utilization capabilities.
Conclusion
The introduction of Re-Invoke, an unsupervised tool retrieval method, addresses a crucial challenge in leveraging the full potential of large language models for autonomous agents. By effectively identifying the most relevant tools for a given task, even in the face of growing toolset sizes, Re-Invoke enables more reliable and comprehensive task fulfillment capabilities.
The researchers' evaluation demonstrates the significant performance improvements offered by Re-Invoke compared to state-of-the-art alternatives, particularly in complex, multi-tool scenarios. This advancement has the potential to enhance the capabilities of AI assistants and other autonomous agents, empowering them to tackle an ever-widening range of tasks and challenges.
As the field of large language models continues to evolve, techniques like Re-Invoke will play an increasingly crucial role in unlocking the full potential of these powerful systems and ensuring their responsible and effective deployment in real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
➖
0
Re-Invoke: Tool Invocation Rewriting for Zero-Shot Tool Retrieval
Yanfei Chen, Jinsung Yoon, Devendra Singh Sachan, Qingze Wang, Vincent Cohen-Addad, Mohammadhossein Bateni, Chen-Yu Lee, Tomas Pfister
Recent advances in large language models (LLMs) have enabled autonomous agents with complex reasoning and task-fulfillment capabilities using a wide range of tools. However, effectively identifying the most relevant tools for a given task becomes a key bottleneck as the toolset size grows, hindering reliable tool utilization. To address this, we introduce Re-Invoke, an unsupervised tool retrieval method designed to scale effectively to large toolsets without training. Specifically, we first generate a diverse set of synthetic queries that comprehensively cover different aspects of the query space associated with each tool document during the tool indexing phase. Second, we leverage LLM's query understanding capabilities to extract key tool-related context and underlying intents from user queries during the inference phase. Finally, we employ a novel multi-view similarity ranking strategy based on intents to pinpoint the most relevant tools for each query. Our evaluation demonstrates that Re-Invoke significantly outperforms state-of-the-art alternatives in both single-tool and multi-tool scenarios, all within a fully unsupervised setting. Notably, on the ToolE datasets, we achieve a 20% relative improvement in nDCG@5 for single-tool retrieval and a 39% improvement for multi-tool retrieval.
Read more9/24/2024
🛠️
0
Efficient and Scalable Estimation of Tool Representations in Vector Space
Suhong Moon, Siddharth Jha, Lutfi Eren Erdogan, Sehoon Kim, Woosang Lim, Kurt Keutzer, Amir Gholami
Recent advancements in function calling and tool use have significantly enhanced the capabilities of large language models (LLMs) by enabling them to interact with external information sources and execute complex tasks. However, the limited context window of LLMs presents challenges when a large number of tools are available, necessitating efficient methods to manage prompt length and maintain accuracy. Existing approaches, such as fine-tuning LLMs or leveraging their reasoning capabilities, either require frequent retraining or incur significant latency overhead. A more efficient solution involves training smaller models to retrieve the most relevant tools for a given query, although this requires high quality, domain-specific data. To address those challenges, we present a novel framework for generating synthetic data for tool retrieval applications and an efficient data-driven tool retrieval strategy using small encoder models. Empowered by LLMs, we create ToolBank, a new tool retrieval dataset that reflects real human user usages. For tool retrieval methodologies, we propose novel approaches: (1) Tool2Vec: usage-driven tool embedding generation for tool retrieval, (2) ToolRefiner: a staged retrieval method that iteratively improves the quality of retrieved tools, and (3) MLC: framing tool retrieval as a multi-label classification problem. With these new methods, we achieve improvements of up to 27.28 in Recall@K on the ToolBench dataset and 30.5 in Recall@K on ToolBank. Additionally, we present further experimental results to rigorously validate our methods. Our code is available at url{https://github.com/SqueezeAILab/Tool2Vec}
Read more9/5/2024
0
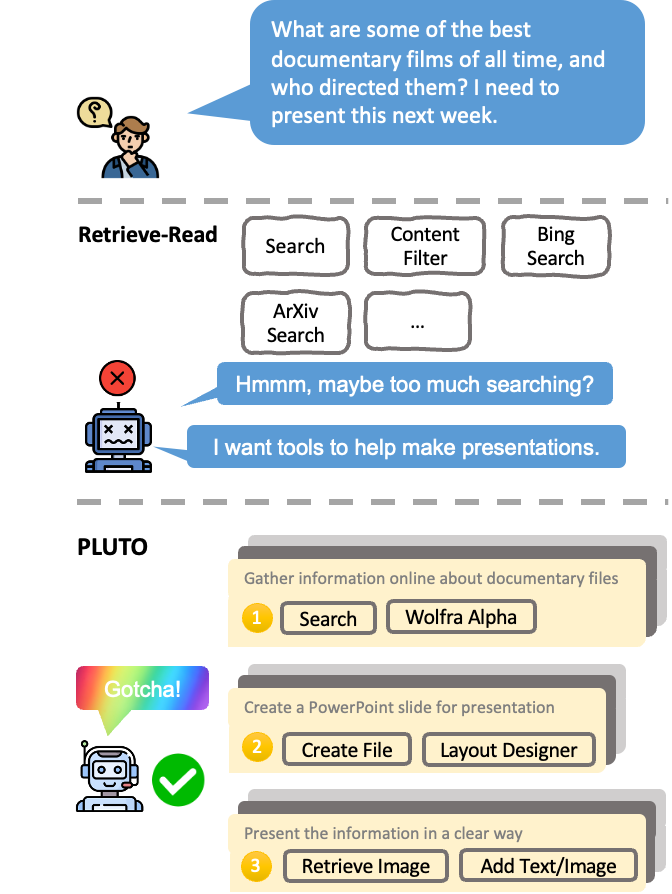
Planning and Editing What You Retrieve for Enhanced Tool Learning
Tenghao Huang, Dongwon Jung, Muhao Chen
Recent advancements in integrating external tools with Large Language Models (LLMs) have opened new frontiers, with applications in mathematical reasoning, code generators, and smart assistants. However, existing methods, relying on simple one-time retrieval strategies, fall short on effectively and accurately shortlisting relevant tools. This paper introduces a novel PLUTO (Planning, Learning, and Understanding for TOols) approach, encompassing `Plan-and-Retrieve (P&R)` and `Edit-and-Ground (E&G)` paradigms. The P&R paradigm consists of a neural retrieval module for shortlisting relevant tools and an LLM-based query planner that decomposes complex queries into actionable tasks, enhancing the effectiveness of tool utilization. The E&G paradigm utilizes LLMs to enrich tool descriptions based on user scenarios, bridging the gap between user queries and tool functionalities. Experiment results demonstrate that these paradigms significantly improve the recall and NDCG in tool retrieval tasks, significantly surpassing current state-of-the-art models.
Read more4/5/2024
0
COLT: Towards Completeness-Oriented Tool Retrieval for Large Language Models
Changle Qu, Sunhao Dai, Xiaochi Wei, Hengyi Cai, Shuaiqiang Wang, Dawei Yin, Jun Xu, Ji-Rong Wen
Recently, integrating external tools with Large Language Models (LLMs) has gained significant attention as an effective strategy to mitigate the limitations inherent in their pre-training data. However, real-world systems often incorporate a wide array of tools, making it impractical to input all tools into LLMs due to length limitations and latency constraints. Therefore, to fully exploit the potential of tool-augmented LLMs, it is crucial to develop an effective tool retrieval system. Existing tool retrieval methods primarily focus on semantic matching between user queries and tool descriptions, frequently leading to the retrieval of redundant, similar tools. Consequently, these methods fail to provide a complete set of diverse tools necessary for addressing the multifaceted problems encountered by LLMs. In this paper, we propose a novel modelagnostic COllaborative Learning-based Tool Retrieval approach, COLT, which captures not only the semantic similarities between user queries and tool descriptions but also takes into account the collaborative information of tools. Specifically, we first fine-tune the PLM-based retrieval models to capture the semantic relationships between queries and tools in the semantic learning stage. Subsequently, we construct three bipartite graphs among queries, scenes, and tools and introduce a dual-view graph collaborative learning framework to capture the intricate collaborative relationships among tools during the collaborative learning stage. Extensive experiments on both the open benchmark and the newly introduced ToolLens dataset show that COLT achieves superior performance. Notably, the performance of BERT-mini (11M) with our proposed model framework outperforms BERT-large (340M), which has 30 times more parameters. Furthermore, we will release ToolLens publicly to facilitate future research on tool retrieval.
Read more7/30/2024