Demonstrating a Robust Walking Algorithm for Underactuated Bipedal Robots in Non-flat, Non-stationary Environments

0

Sign in to get full access
Overview
- This research paper presents a robust walking algorithm for underactuated bipedal robots in non-flat, non-stationary environments.
- The algorithm is designed to enable stable and agile locomotion on uneven terrain and in dynamic settings.
- The researchers demonstrate the effectiveness of their approach through simulations and experiments with a physical robot platform.
Plain English Explanation
The paper describes a new way for bipedal robots - robots that walk on two legs - to move around reliably, even when the ground is uneven or changing.
Most bipedal robots today have a hard time walking on surfaces that are not completely flat and stable. This new algorithm allows the robots to adapt and maintain balance as they encounter hills, steps, loose gravel, and other challenging terrain. It also enables them to handle situations where the environment is in motion, like a robot following a person through a crowded room.
The researchers tested their approach through computer simulations and by having a real robot try it out. The results show the algorithm can help bipedal robots walk much more robustly in the real world, which could lead to them being useful for tasks like search and rescue, construction, or exploration in difficult environments.
Technical Explanation
The paper introduces a robust walking algorithm for underactuated bipedal robots that can handle non-flat, non-stationary environments. The key innovations include:
- An enhanced capture point model that accounts for terrain variations and dynamic disturbances
- A Model Predictive Control (MPC) framework that optimizes the robot's motions to maintain balance and follow a desired trajectory
- Reinforcement learning modules that allow the robot to adapt its behavior based on sensory feedback from the environment
The researchers validate their approach through extensive simulations as well as experiments on a physical bipedal robot platform. The results demonstrate significant improvements in stability and agility compared to baseline methods, particularly when navigating challenging, non-flat terrains and responding to dynamic changes in the surroundings.
Critical Analysis
The paper presents a comprehensive and technically robust solution for enabling robust bipedal locomotion in complex, real-world environments. The authors have carefully considered the key challenges and limitations of prior work, and their proposed algorithm appears to offer substantial advancements.
That said, the paper does not address some potential limitations or areas for further research. For example, it is unclear how the algorithm would scale to more dynamic or unstructured environments, such as those with moving obstacles or highly irregular terrain. Additionally, the computational complexity and real-time performance of the MPC and reinforcement learning components could be areas for optimization and further study.
Overall, this research represents an important step forward in the field of legged robotics, with the potential to enable more capable and adaptive bipedal robots for a variety of real-world applications.
Conclusion
This paper presents a novel and robust walking algorithm for underactuated bipedal robots that can navigate non-flat, non-stationary environments. The key innovations include an enhanced capture point model, an MPC framework, and reinforcement learning modules that allow the robot to adapt to its surroundings.
The researchers demonstrate the effectiveness of their approach through extensive simulations and experiments with a physical robot platform. The results show significant improvements in stability and agility compared to baseline methods, suggesting this work could lead to more capable and versatile bipedal robots for applications in challenging real-world settings.
While the paper does not address all potential limitations, it represents an important advancement in the field of legged robotics and lays the groundwork for further research and development in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Demonstrating a Robust Walking Algorithm for Underactuated Bipedal Robots in Non-flat, Non-stationary Environments
Oluwami Dosunmu-Ogunbi, Aayushi Shrivastava, Jessy W Grizzle
This work explores an innovative algorithm designed to enhance the mobility of underactuated bipedal robots across challenging terrains, especially when navigating through spaces with constrained opportunities for foot support, like steps or stairs. By combining ankle torque with a refined angular momentum-based linear inverted pendulum model (ALIP), our method allows variability in the robot's center of mass height. We employ a dual-strategy controller that merges virtual constraints for precise motion regulation across essential degrees of freedom with an ALIP-centric model predictive control (MPC) framework, aimed at enforcing gait stability. The effectiveness of our feedback design is demonstrated through its application on the Cassie bipedal robot, which features 20 degrees of freedom. Key to our implementation is the development of tailored nominal trajectories and an optimized MPC that reduces the execution time to under 500 microseconds--and, hence, is compatible with Cassie's controller update frequency. This paper not only showcases the successful hardware deployment but also demonstrates a new capability, a bipedal robot using a moving walkway.
Read more9/9/2024

0
Time-Varying Foot-Placement Control for Underactuated Humanoid Walking on Swaying Rigid Surfaces
Yuan Gao, Victor Paredes, Yukai Gong, Zijian He, Ayonga Hereid, Yan Gu
Locomotion on dynamic rigid surface (i.e., rigid surface accelerating in an inertial frame) presents complex challenges for controller design, which are essential for deploying humanoid robots in dynamic real-world environments such as moving trains, ships, and airplanes. This paper introduces a real-time, provably stabilizing control approach for underactuated humanoid walking on periodically swaying rigid surface. The first key contribution is the analytical extension of the classical angular momentum-based linear inverted pendulum model from static to swaying grounds. This extension results in a time-varying, nonhomogeneous robot model, which is fundamentally different from the existing pendulum models. We synthesize a discrete footstep control law for the model and derive a new set of sufficient stability conditions that verify the controller's stabilizing effect. Another key contribution is the development of a hierarchical control framework that incorporates the proposed footstep control law as its higher-layer planner to ensure the stability of underactuated walking. The closed-loop stability of the complete hybrid, full-order robot dynamics under this control framework is provably analyzed based on nonlinear control theory. Finally, experiments conducted on a Digit humanoid robot, both in simulations and with hardware, demonstrate the framework's effectiveness in addressing underactuated bipedal locomotion on swaying ground, even in the presence of uncertain surface motions and unknown external pushes.
Read more9/16/2024
0
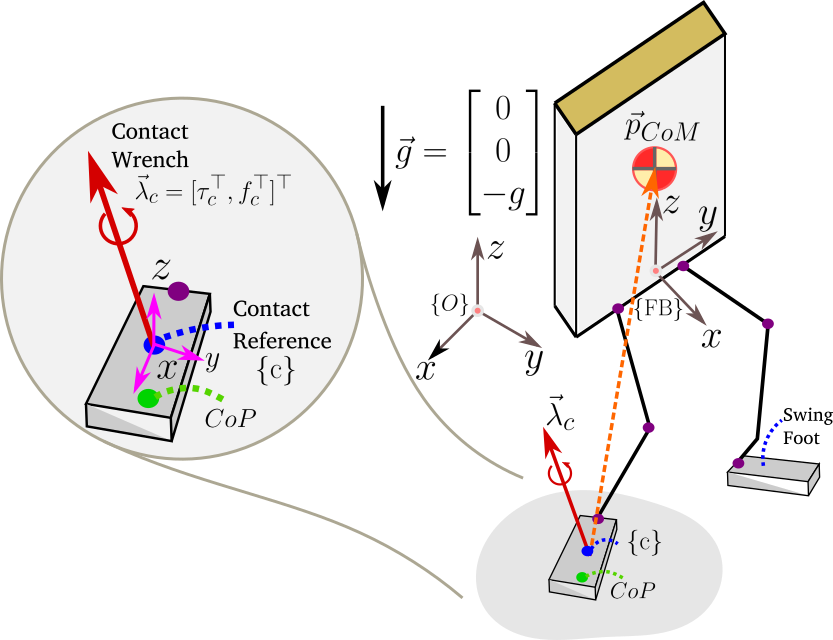
Moving past point-contacts: Extending the ALIP model to humanoids with non-trivial feet using hierarchical, full-body momentum control
Victor C. Paredes, Daniel A. Hagen, Samuel W. Chesebrough, Riley Swann, Denis Garagic, Ayonga Hereid
The Angular-Momentum Linear Inverted Pendulum (ALIP) model is a promising motion planner for bipedal robots. However, it relies on two assumptions: (1) the robot has point-contact feet or passive ankles, and (2) the angular momentum around the center of mass, known as centroidal angular momentum, is negligible. This paper addresses the question of whether the ALIP paradigm can be applied to more general bipedal systems with complex foot geometry (e.g., flat feet) and nontrivial torso/limb inertia and mass distribution (e.g., non-centralized arms). In such systems, the dynamics introduce non-negligible centroidal momentum and contact wrenches at the feet, rendering the assumptions of the ALIP model invalid. This paper presents the ALIP planner for general bipedal robots with non-point-contact feet through the use of a task-space whole-body controller that regulates centroidal momentum, thereby ensuring that the robot's behavior aligns with the desired template dynamics. To demonstrate the effectiveness of our proposed approach, we conduct simulations using the Sarcos Guardian XO robot, which is a hybrid humanoid/exoskeleton with large, offset feet. The results demonstrate the practicality and effectiveness of our approach in achieving stable and versatile bipedal locomotion.
Read more8/13/2024

0
Real-time Coupled Centroidal Motion and Footstep Planning for Biped Robots
Tara Bartlett, Ian R. Manchester
This paper presents an algorithm that finds a centroidal motion and footstep plan for a Spring-Loaded Inverted Pendulum (SLIP)-like bipedal robot model substantially faster than real-time. This is achieved with a novel representation of the dynamic footstep planning problem, where each point in the environment is considered a potential foothold that can apply a force to the center of mass to keep it on a desired trajectory. For a biped, up to two such footholds per time step must be selected, and we approximate this cardinality constraint with an iteratively reweighted $l_1$-norm minimization. Along with a linearizing approximation of an angular momentum constraint, this results in a quadratic program can be solved for a contact schedule and center of mass trajectory with automatic gait discovery. A 2 s planning horizon with 13 time steps and 20 surfaces available at each time is solved in 142 ms, roughly ten times faster than comparable existing methods in the literature. We demonstrate the versatility of this program in a variety of simulated environments.
Read more9/17/2024