Reinforcement Learning Aided Sequential Optimization for Unsignalized Intersection Management of Robot Traffic

0
🏅
Sign in to get full access
Overview
- This paper addresses the problem of optimal unsignalized intersection management for a set of robots arriving randomly and continually.
- The key challenge is to obtain safe and optimal trajectories for the robots while dealing with the exponential scaling of computation time required for a naive optimization approach.
- The authors propose a solution framework that combines learning and sequential optimization to address this challenge.
Plain English Explanation
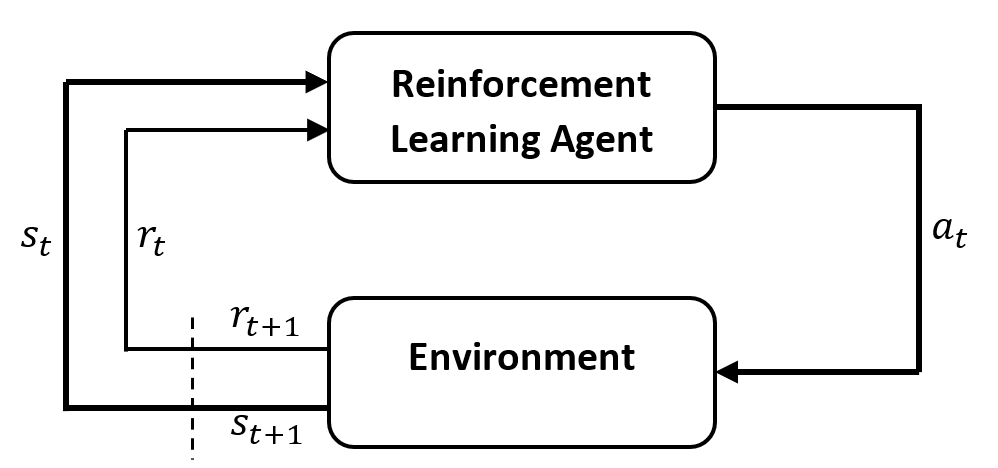
The paper focuses on the problem of managing traffic at unsignalized intersections where a group of robots are continuously arriving and crossing the intersection. The goal is to find the safest and most efficient paths for the robots to cross the intersection without colliding.
The challenge is that using a straightforward optimization algorithm to plan the robots' trajectories becomes computationally expensive very quickly as the number of robots and lanes increases. The authors realized that a more efficient approach was needed for real-time implementation.
Their solution is a two-part framework. First, they train a machine learning model to learn a shared policy that determines the order in which the robots should cross the intersection. This policy is based on the current traffic conditions. Then, they optimize the individual robot trajectories sequentially according to that crossing order. This approach ensures safety while also being computationally efficient.
The authors validate their approach through extensive simulations and show that it significantly outperforms several existing heuristic methods in terms of objective function, average crossing time, and computation time. They also demonstrate that their framework can be implemented on physical robots with some modifications to handle real-world challenges.
Technical Explanation
The authors formulate the optimal unsignalized intersection management problem as a mixed integer program, where the decision variables are the acceleration trajectories of the robots. However, they recognize that solving this optimization problem naively becomes computationally intractable as the number of robots and lanes increases.
To address this, the authors propose a two-step solution framework. First, they train a machine learning model to learn a shared policy that determines the crossing order of the robots based on the current traffic state information. This learned policy inherently guarantees safety, as the robots will always cross in the determined order.
Next, the authors optimize the individual robot trajectories sequentially according to the learned crossing order. This sequential optimization approach is computationally much more efficient than solving the full mixed integer program.
The authors validate their approach through extensive simulations, comparing it against 5 different heuristic methods from the literature across 9 different simulation settings. Their approach significantly outperforms the heuristics in terms of the objective function, weighted average of crossing times, and computation time. In some scenarios, the authors observe up to a 150% improvement in the objective value over the first-come-first-served heuristic.
The authors also show that the computation time for their approach scales linearly with the number of robots, assuming all other factors are constant. This makes their framework suitable for real-time implementation. Finally, they demonstrate the feasibility of their approach on physical robots with some modifications to handle real-world challenges.
Critical Analysis
The authors have presented a novel and effective solution to the problem of optimal unsignalized intersection management. Their two-step framework, combining learning and sequential optimization, is a clever way to address the computational challenges of the naive optimization approach.
One potential limitation of the research is that it assumes the robots arrive randomly and continually. In real-world scenarios, there may be more structure or predictability in the arrival patterns, which could be leveraged to further improve the optimization.
Additionally, the authors only consider the case of unsignalized intersections. It would be interesting to see how their approach could be extended to handle signalized intersections or more complex road networks. Adaptive traffic signal control could be an interesting area for further research.
The authors also do not explore the impact of sensor noise or partial observability of the traffic state, which could be important factors in real-world deployments. Enhancing safety in the face of partial observability could be another direction for future work.
Overall, the authors have presented a compelling solution that demonstrates the potential of combining learning and optimization techniques to address complex transportation problems. Further research in this direction could lead to significant improvements in the efficiency and safety of autonomous transportation systems.
Conclusion
This paper proposes a novel solution framework for the problem of optimal unsignalized intersection management. By combining learning and sequential optimization, the authors have developed an approach that can efficiently plan safe and optimal trajectories for a set of robots arriving randomly and continually at an intersection.
The key innovation of the authors' solution is the use of a learned shared policy to determine the crossing order of the robots, which inherently guarantees safety. This, combined with the sequential optimization of individual robot trajectories, results in a computationally efficient framework that significantly outperforms existing heuristic methods.
The authors' work demonstrates the power of integrating learning and optimization techniques to tackle complex transportation problems. Their approach could have far-reaching implications for the development of efficient and safe autonomous transportation systems, ultimately improving mobility and reducing accidents in the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
0
Reinforcement Learning Aided Sequential Optimization for Unsignalized Intersection Management of Robot Traffic
Nishchal Hoysal G., Pavankumar Tallapragada
We consider the problem of optimal unsignalized intersection management, wherein we seek to obtain safe and optimal trajectories, for a set of robots that arrive randomly and continually. This problem involves repeatedly solving a mixed integer program (with robot acceleration trajectories as decision variables) with different parameters, for which the computation time using a naive optimization algorithm scales exponentially with the number of robots and lanes. Hence, such an approach is not suitable for real-time implementation. In this paper, we propose a solution framework that combines learning and sequential optimization. In particular, we propose an algorithm for learning a shared policy that given the traffic state information, determines the crossing order of the robots. Then, we optimize the trajectories of the robots sequentially according to that crossing order. This approach inherently guarantees safety at all times. We validate the performance of this approach using extensive simulations and compare our approach against $5$ different heuristics from the literature in $9$ different simulation settings. Our approach, on average, significantly outperforms the heuristics from the literature in various metrics like objective function, weighted average of crossing times and computation time. For example, in some scenarios, we have observed that our approach offers up to $150%$ improvement in objective value over the first come first serve heuristic. Even on untrained scenarios, our approach shows a consistent improvement (in objective value) of more than $30%$ over all heuristics under consideration. We also show through simulations that the computation time for our approach scales linearly with the number of robots (assuming all other factors are constant). Learnt policies are implemented on physical robots with slightly modified framework to address real-world challenges.
Read more8/9/2024
0
Adaptive Traffic Signal Control Using Reinforcement Learning
Muhammad Tahir Rafique, Ahmed Mustafa, Hasan Sajid
The growing demand for road use in urban areas has led to significant traffic congestion, posing challenges that are costly to mitigate through infrastructure expansion alone. As an alternative, optimizing existing traffic management systems, particularly through adaptive traffic signal control, offers a promising solution. This paper explores the use of Reinforcement Learning (RL) to enhance traffic signal operations at intersections, aiming to reduce congestion without extensive sensor networks. We introduce two RL-based algorithms: a turn-based agent, which dynamically prioritizes traffic signals based on real-time queue lengths, and a time-based agent, which adjusts signal phase durations according to traffic conditions while following a fixed phase cycle. By representing the state as a scalar queue length, our approach simplifies the learning process and lowers deployment costs. The algorithms were tested in four distinct traffic scenarios using seven evaluation metrics to comprehensively assess performance. Simulation results demonstrate that both RL algorithms significantly outperform conventional traffic signal control systems, highlighting their potential to improve urban traffic flow efficiently.
Read more9/4/2024

0
CoSLight: Co-optimizing Collaborator Selection and Decision-making to Enhance Traffic Signal Control
Jingqing Ruan, Ziyue Li, Hua Wei, Haoyuan Jiang, Jiaming Lu, Xuantang Xiong, Hangyu Mao, Rui Zhao
Effective multi-intersection collaboration is pivotal for reinforcement-learning-based traffic signal control to alleviate congestion. Existing work mainly chooses neighboring intersections as collaborators. However, quite an amount of congestion, even some wide-range congestion, is caused by non-neighbors failing to collaborate. To address these issues, we propose to separate the collaborator selection as a second policy to be learned, concurrently being updated with the original signal-controlling policy. Specifically, the selection policy in real-time adaptively selects the best teammates according to phase- and intersection-level features. Empirical results on both synthetic and real-world datasets provide robust validation for the superiority of our approach, offering significant improvements over existing state-of-the-art methods. The code is available at https://github.com/bonaldli/CoSLight.
Read more6/21/2024

0
GAMEOPT+: Improving Fuel Efficiency in Unregulated Heterogeneous Traffic Intersections via Optimal Multi-agent Cooperative Control
Nilesh Suriyarachchi, Rohan Chandra, Arya Anantula, John S. Baras, Dinesh Manocha
Better fuel efficiency leads to better financial security as well as a cleaner environment. We propose a novel approach for improving fuel efficiency in unstructured and unregulated traffic environments. Existing intelligent transportation solutions for improving fuel efficiency, however, apply only to traffic intersections with sparse traffic or traffic where drivers obey the regulations, or both. We propose GameOpt+, a novel hybrid approach for cooperative intersection control in dynamic, multi-lane, unsignalized intersections. GameOpt+ is a hybrid solution that combines an auction mechanism and an optimization-based trajectory planner. It generates a priority entrance sequence for each agent and computes velocity controls in real-time, taking less than 10 milliseconds even in high-density traffic with over 10,000 vehicles per hour. Compared to fully optimization-based methods, it operates 100 times faster while ensuring fairness, safety, and efficiency. Tested on the SUMO simulator, our algorithm improves throughput by at least 25%, reduces the time to reach the goal by at least 70%, and decreases fuel consumption by 50% compared to auction-based and signaled approaches using traffic lights and stop signs. GameOpt+ is also unaffected by unbalanced traffic inflows, whereas some of the other baselines encountered a decrease in performance in unbalanced traffic inflow environments.
Read more5/28/2024