Enhancing Safety for Autonomous Agents in Partly Concealed Urban Traffic Environments Through Representation-Based Shielding

0

Sign in to get full access
Overview
- This paper explores enhancing safety for autonomous agents navigating partly concealed urban traffic environments.
- The researchers present a "representation-based shielding" approach that leverages a learned representation of the environment to guide the autonomous agent's actions and avoid unsafe situations.
- Key ideas include learning a compact representation of the environment, using this to forecast potential hazards, and adjusting the agent's actions accordingly to maintain safety.
Plain English Explanation
The paper focuses on making self-driving cars and other autonomous agents safer when navigating crowded urban areas with obstructed views. These environments can be challenging because the agent may not be able to see all potential hazards, like pedestrians or other vehicles, that could pose a danger.
The researchers developed a new technique called "representation-based shielding" to address this problem. The core idea is to train the autonomous agent to build a compact, abstract model or "representation" of the environment around it. This representation allows the agent to anticipate and reason about potential hazards that may be partially hidden from its direct sensors.
Using this learned representation, the agent can then adjust its actions to avoid unsafe situations, essentially "shielding" itself from harm. For example, if the representation indicates a high likelihood of a pedestrian stepping out from behind a parked car, the agent can slow down or change course preemptively.
The key advantages of this approach are that it allows the agent to navigate more safely in complex urban environments, and it can do so without necessarily having a complete, detailed model of the surroundings. The representation captures the key information needed to anticipate hazards, without requiring the agent to perceive and track every single object.
Technical Explanation
The paper presents a framework for "representation-based shielding" of autonomous agents in partly concealed urban traffic environments. The core idea is to train the agent to learn a compact, abstract representation of its environment that captures the key features relevant to safe navigation, even when direct sensor observations are incomplete.
This learned representation is then used to forecast potential hazards and guide the agent's actions to avoid unsafe situations. Specifically, the agent's policy is trained to not only optimize for task completion, but also to respect a set of safety constraints derived from the environmental representation.
The authors evaluate this approach using both simulation experiments and real-world datasets of urban traffic. They demonstrate that the representation-based shielding framework can significantly improve safety metrics like collision avoidance, compared to baseline approaches that rely solely on direct sensor observations.
A key technical insight is that the learned environmental representation can be more compact and efficient than a full, detailed model of the surroundings. This allows the agent to reason about safety in a computationally tractable way, without the burden of maintaining a high-fidelity world model.
Critical Analysis
The paper presents a promising approach for enhancing the safety of autonomous agents in complex urban environments. The core idea of learning a compact, abstract representation of the environment to reason about potential hazards is well-motivated and the empirical results are convincing.
However, the paper also acknowledges several limitations and areas for further research. For example, the current framework assumes the agent has access to a "perfect" representation of the environment, which may not always be the case in real-world settings with sensor noise and uncertainties.
Additionally, the paper does not explore how this representation-based shielding approach might scale to highly complex, dynamic urban environments with a large number of actors and interactions. Extending the techniques to these more challenging scenarios is an important direction for future work.
Overall, the research presented in this paper represents a valuable contribution to the field of safe and robust autonomous navigation. While there are still open challenges, the representation-based shielding framework offers a promising path forward for enhancing the safety of self-driving cars and other autonomous agents operating in the real world.
Conclusion
This paper introduces a novel "representation-based shielding" approach for improving the safety of autonomous agents navigating partly concealed urban traffic environments. By training the agent to learn a compact, abstract representation of its surroundings, the framework enables the agent to anticipate potential hazards and adjust its actions accordingly, even when direct sensor observations are incomplete.
The key advantages of this approach are improved safety, computational efficiency, and robustness to partial observability - all critical requirements for the real-world deployment of autonomous systems. While there are still open challenges to address, this research represents an important step forward in enhancing the safety and reliability of self-driving cars and other autonomous agents operating in complex, crowded urban settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Enhancing Safety for Autonomous Agents in Partly Concealed Urban Traffic Environments Through Representation-Based Shielding
Pierre Haritz, David Wanke, Thomas Liebig
Navigating unsignalized intersections in urban environments poses a complex challenge for self-driving vehicles, where issues such as view obstructions, unpredictable pedestrian crossings, and diverse traffic participants demand a great focus on crash prevention. In this paper, we propose a novel state representation for Reinforcement Learning (RL) agents centered around the information perceivable by an autonomous agent, enabling the safe navigation of previously uncharted road maps. Our approach surpasses several baseline models by a sig nificant margin in terms of safety and energy consumption metrics. These improvements are achieved while maintaining a competitive average travel speed. Our findings pave the way for more robust and reliable autonomous navigation strategies, promising safer and more efficient urban traffic environments.
Read more7/8/2024

0
Uncertainty-Aware DRL for Autonomous Vehicle Crowd Navigation in Shared Space
Mahsa Golchoubian, Moojan Ghafurian, Kerstin Dautenhahn, Nasser Lashgarian Azad
Safe, socially compliant, and efficient navigation of low-speed autonomous vehicles (AVs) in pedestrian-rich environments necessitates considering pedestrians' future positions and interactions with the vehicle and others. Despite the inevitable uncertainties associated with pedestrians' predicted trajectories due to their unobserved states (e.g., intent), existing deep reinforcement learning (DRL) algorithms for crowd navigation often neglect these uncertainties when using predicted trajectories to guide policy learning. This omission limits the usability of predictions when diverging from ground truth. This work introduces an integrated prediction and planning approach that incorporates the uncertainties of predicted pedestrian states in the training of a model-free DRL algorithm. A novel reward function encourages the AV to respect pedestrians' personal space, decrease speed during close approaches, and minimize the collision probability with their predicted paths. Unlike previous DRL methods, our model, designed for AV operation in crowded spaces, is trained in a novel simulation environment that reflects realistic pedestrian behaviour in a shared space with vehicles. Results show a 40% decrease in collision rate and a 15% increase in minimum distance to pedestrians compared to the state of the art model that does not account for prediction uncertainty. Additionally, the approach outperforms model predictive control methods that incorporate the same prediction uncertainties in terms of both performance and computational time, while producing trajectories closer to human drivers in similar scenarios.
Read more5/24/2024
0
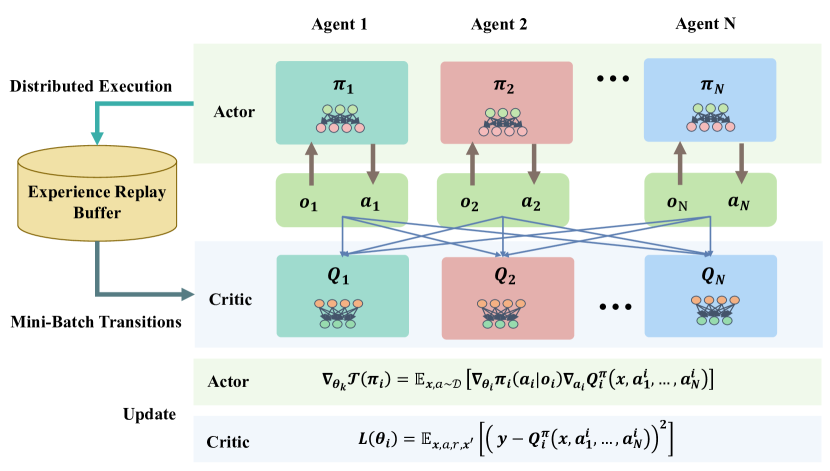
Cooperative Decision-Making for CAVs at Unsignalized Intersections: A MARL Approach with Attention and Hierarchical Game Priors
Jiaqi Liu, Peng Hang, Xiaoxiang Na, Chao Huang, Jian Sun
The development of autonomous vehicles has shown great potential to enhance the efficiency and safety of transportation systems. However, the decision-making issue in complex human-machine mixed traffic scenarios, such as unsignalized intersections, remains a challenge for autonomous vehicles. While reinforcement learning (RL) has been used to solve complex decision-making problems, existing RL methods still have limitations in dealing with cooperative decision-making of multiple connected autonomous vehicles (CAVs), ensuring safety during exploration, and simulating realistic human driver behaviors. In this paper, a novel and efficient algorithm, Multi-Agent Game-prior Attention Deep Deterministic Policy Gradient (MA-GA-DDPG), is proposed to address these limitations. Our proposed algorithm formulates the decision-making problem of CAVs at unsignalized intersections as a decentralized multi-agent reinforcement learning problem and incorporates an attention mechanism to capture interaction dependencies between ego CAV and other agents. The attention weights between the ego vehicle and other agents are then used to screen interaction objects and obtain prior hierarchical game relations, based on which a safety inspector module is designed to improve the traffic safety. Furthermore, both simulation and hardware-in-the-loop experiments were conducted, demonstrating that our method outperforms other baseline approaches in terms of driving safety, efficiency, and comfort.
Read more9/10/2024
0
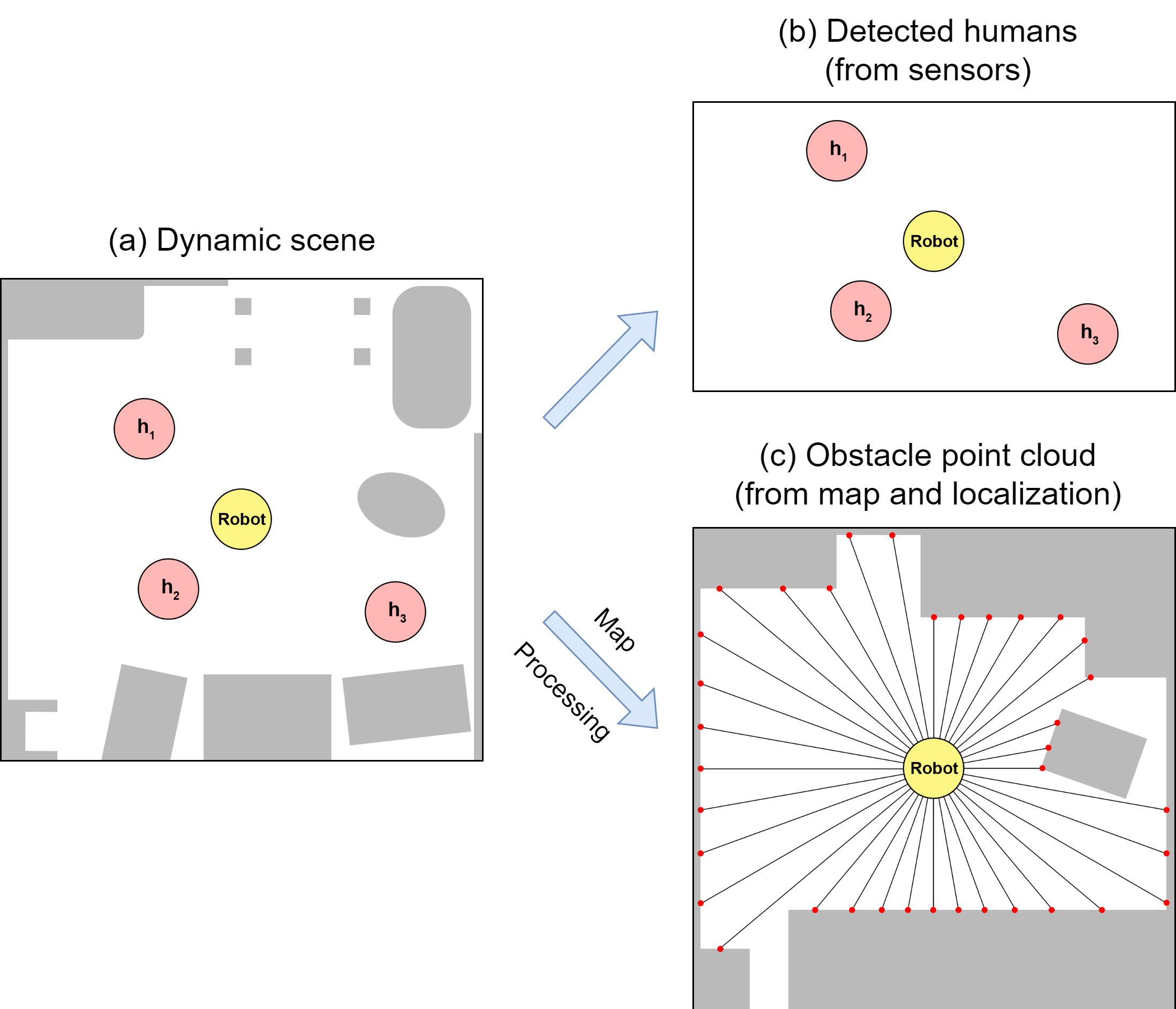
Structured Graph Network for Constrained Robot Crowd Navigation with Low Fidelity Simulation
Shuijing Liu, Kaiwen Hong, Neeloy Chakraborty, Katherine Driggs-Campbell
We investigate the feasibility of deploying reinforcement learning (RL) policies for constrained crowd navigation using a low-fidelity simulator. We introduce a representation of the dynamic environment, separating human and obstacle representations. Humans are represented through detected states, while obstacles are represented as computed point clouds based on maps and robot localization. This representation enables RL policies trained in a low-fidelity simulator to deploy in real world with a reduced sim2real gap. Additionally, we propose a spatio-temporal graph to model the interactions between agents and obstacles. Based on the graph, we use attention mechanisms to capture the robot-human, human-human, and human-obstacle interactions. Our method significantly improves navigation performance in both simulated and real-world environments. Video demonstrations can be found at https://sites.google.com/view/constrained-crowdnav/home.
Read more5/29/2024