Reinforcement Learning Compensated Model Predictive Control for Off-road Driving on Unknown Deformable Terrain

0

Sign in to get full access
Overview
- This paper proposes a novel reinforcement learning (RL) compensated model predictive control (MPC) framework for autonomous off-road driving on unknown deformable terrain.
- The system combines RL-based adaptive control with MPC to handle the complex and uncertain dynamics of off-road driving.
- Experiments demonstrate the system's ability to navigate challenging off-road environments while maintaining stable and safe vehicle control.
Plain English Explanation
The paper describes a system that allows autonomous vehicles to drive safely over rough, unpredictable terrain. Typical control systems can struggle with the rapidly changing conditions of off-road environments, so the researchers developed a new approach that combines two key techniques:
-
Reinforcement Learning (RL): RL allows the vehicle to adaptively learn how to respond to different terrain conditions through trial-and-error, building up its skills over time.
-
Model Predictive Control (MPC): MPC uses a model of the vehicle's dynamics to anticipate and plan the optimal control actions a short time into the future. This helps the vehicle stay stable and on course.
By integrating these two components, the system can handle the complex and unpredictable nature of off-road driving, navigating challenging environments while maintaining safe and stable control of the vehicle.
Technical Explanation
The key technical contributions of this work include:
-
Reinforcement Learning Compensated Model Predictive Control: The researchers developed a novel control architecture that combines RL-based adaptive control with MPC. The RL component learns to compensate for errors in the vehicle dynamics model used by the MPC, allowing the system to handle unknown and deformable terrain.
-
Terrain Identification and Modeling: The system uses onboard sensors to identify the current terrain type and adapt the vehicle model and control accordingly. This enables the MPC to more accurately predict the vehicle's behavior on the fly.
-
Efficient Optimization: The researchers implemented a tailored optimization routine to solve the MPC problem efficiently, allowing real-time execution on the vehicle's onboard hardware.
Through extensive simulation and real-world experiments, the authors demonstrate the system's ability to navigate challenging off-road environments, including slopes, obstacles, and soft soil, while maintaining stable and safe vehicle control.
Critical Analysis
The paper presents a well-designed and comprehensive solution for autonomous off-road driving, addressing key challenges in this domain. The combination of RL-based adaptive control and MPC is a promising approach that leverages the strengths of both techniques.
However, the paper does not discuss potential limitations or areas for further research. For example, the system's performance in extreme or edge cases, the impact of sensor failures or inaccuracies, and the computational demands of the approach are not fully explored.
Additionally, while the experiments demonstrate the system's capabilities, further real-world testing and validation would be valuable to assess its robustness and generalizability to a wider range of off-road environments.
Conclusion
This research proposes a novel RL-compensated MPC framework that enables autonomous vehicles to navigate challenging off-road terrain. By integrating adaptive learning and model-based control, the system can handle the complex and uncertain dynamics of these environments, maintaining stable and safe vehicle operation.
The work represents an important step forward in the development of robust and capable autonomous driving systems, with potential applications in areas such as disaster response, agriculture, and exploration. Further research and real-world deployment of this technology could lead to significant advances in the field of off-road mobility and autonomous navigation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Reinforcement Learning Compensated Model Predictive Control for Off-road Driving on Unknown Deformable Terrain
Prakhar Gupta, Jonathon M. Smereka, Yunyi Jia
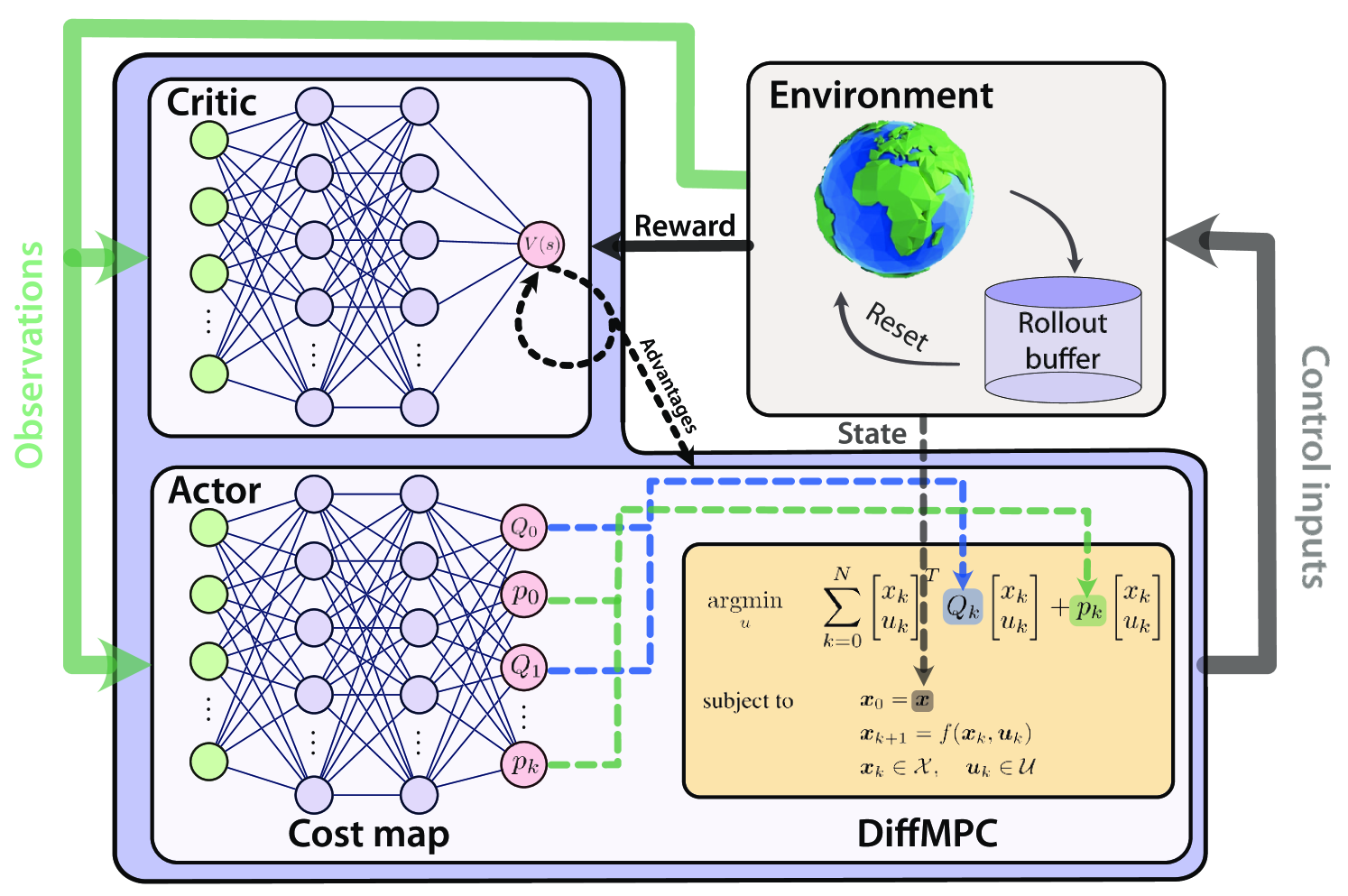
This study presents an Actor-Critic reinforcement learning Compensated Model Predictive Controller (AC2MPC) designed for high-speed, off-road autonomous driving on deformable terrains. Addressing the difficulty of modeling unknown tire-terrain interaction and ensuring real-time control feasibility and performance, this framework integrates deep reinforcement learning with a model predictive controller to manage unmodeled nonlinear dynamics. We evaluate the controller framework over constant and varying velocity profiles using high-fidelity simulator Project Chrono. Our findings demonstrate that our controller statistically outperforms standalone model-based and learning-based controllers over three unknown terrains that represent sandy deformable track, sandy and rocky track and cohesive clay-like deformable soil track. Despite varied and previously unseen terrain characteristics, this framework generalized well enough to track longitudinal reference speeds with the least error. Furthermore, this framework required significantly less training data compared to purely learning based controller, converging in fewer steps while delivering better performance. Even when under-trained, this controller outperformed the standalone controllers, highlighting its potential for safer and more efficient real-world deployment.
Read more8/20/2024
📈
0
Model Predictive Control for Aggressive Driving Over Uneven Terrain
Tyler Han, Alex Liu, Anqi Li, Alex Spitzer, Guanya Shi, Byron Boots
Terrain traversability in unstructured off-road autonomy has traditionally relied on semantic classification, resource-intensive dynamics models, or purely geometry-based methods to predict vehicle-terrain interactions. While inconsequential at low speeds, uneven terrain subjects our full-scale system to safety-critical challenges at operating speeds of 7--10 m/s. This study focuses particularly on uneven terrain such as hills, banks, and ditches. These common high-risk geometries are capable of disabling the vehicle and causing severe passenger injuries if poorly traversed. We introduce a physics-based framework for identifying traversability constraints on terrain dynamics. Using this framework, we derive two fundamental constraints, each with a focus on mitigating rollover and ditch-crossing failures while being fully parallelizable in the sample-based Model Predictive Control (MPC) framework. In addition, we present the design of our planning and control system, which implements our parallelized constraints in MPC and utilizes a low-level controller to meet the demands of our aggressive driving without prior information about the environment and its dynamics. Through real-world experimentation and traversal of hills and ditches, we demonstrate that our approach captures fundamental elements of safe and aggressive autonomy over uneven terrain. Our approach improves upon geometry-based methods by completing comprehensive off-road courses up to 22% faster while maintaining safe operation.
Read more6/11/2024
0
Actor-Critic Model Predictive Control
Angel Romero, Yunlong Song, Davide Scaramuzza
An open research question in robotics is how to combine the benefits of model-free reinforcement learning (RL) - known for its strong task performance and flexibility in optimizing general reward formulations - with the robustness and online replanning capabilities of model predictive control (MPC). This paper provides an answer by introducing a new framework called Actor-Critic Model Predictive Control. The key idea is to embed a differentiable MPC within an actor-critic RL framework. The proposed approach leverages the short-term predictive optimization capabilities of MPC with the exploratory and end-to-end training properties of RL. The resulting policy effectively manages both short-term decisions through the MPC-based actor and long-term prediction via the critic network, unifying the benefits of both model-based control and end-to-end learning. We validate our method in both simulation and the real world with a quadcopter platform across various high-level tasks. We show that the proposed architecture can achieve real-time control performance, learn complex behaviors via trial and error, and retain the predictive properties of the MPC to better handle out of distribution behaviour.
Read more4/15/2024

0
Adaptive Model Predictive Control with Data-driven Error Model for Quadrupedal Locomotion
Xuanqi Zeng, Hongbo Zhang, Linzhu Yue, Zhitao Song, Linwei Zhang, Yun-Hui Liu
Model Predictive Control (MPC) relies heavily on the robot model for its control law. However, a gap always exists between the reduced-order control model with uncertainties and the real robot, which degrades its performance. To address this issue, we propose the controller of integrating a data-driven error model into traditional MPC for quadruped robots. Our approach leverages real-world data from sensors to compensate for defects in the control model. Specifically, we employ the Autoregressive Moving Average Vector (ARMAV) model to construct the state error model of the quadruped robot using data. The predicted state errors are then used to adjust the predicted future robot states generated by MPC. By such an approach, our proposed controller can provide more accurate inputs to the system, enabling it to achieve desired states even in the presence of model parameter inaccuracies or disturbances. The proposed controller exhibits the capability to partially eliminate the disparity between the model and the real-world robot, thereby enhancing the locomotion performance of quadruped robots. We validate our proposed method through simulations and real-world experimental trials on a large-size quadruped robot that involves carrying a 20 kg un-modeled payload (84% of body weight).
Read more7/16/2024