Model Predictive Control for Aggressive Driving Over Uneven Terrain
2311.12284
0
0
📈
Abstract
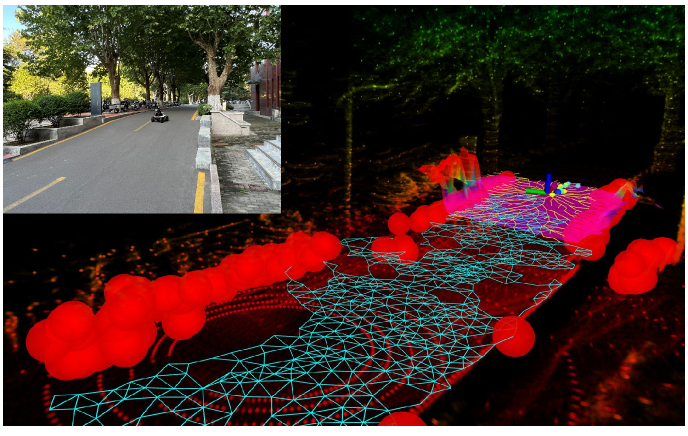
Terrain traversability in unstructured off-road autonomy has traditionally relied on semantic classification, resource-intensive dynamics models, or purely geometry-based methods to predict vehicle-terrain interactions. While inconsequential at low speeds, uneven terrain subjects our full-scale system to safety-critical challenges at operating speeds of 7--10 m/s. This study focuses particularly on uneven terrain such as hills, banks, and ditches. These common high-risk geometries are capable of disabling the vehicle and causing severe passenger injuries if poorly traversed. We introduce a physics-based framework for identifying traversability constraints on terrain dynamics. Using this framework, we derive two fundamental constraints, each with a focus on mitigating rollover and ditch-crossing failures while being fully parallelizable in the sample-based Model Predictive Control (MPC) framework. In addition, we present the design of our planning and control system, which implements our parallelized constraints in MPC and utilizes a low-level controller to meet the demands of our aggressive driving without prior information about the environment and its dynamics. Through real-world experimentation and traversal of hills and ditches, we demonstrate that our approach captures fundamental elements of safe and aggressive autonomy over uneven terrain. Our approach improves upon geometry-based methods by completing comprehensive off-road courses up to 22% faster while maintaining safe operation.
Create account to get full access
Overview
- This paper focuses on improving the safety and performance of autonomous off-road vehicles navigating uneven terrain at high speeds.
- Traditional methods for predicting vehicle-terrain interactions rely on resource-intensive dynamics models or purely geometric approaches, which can be insufficient at higher speeds.
- The researchers introduce a physics-based framework to identify traversability constraints that can mitigate the risk of rollover and ditch-crossing failures.
- They integrate these constraints into a Model Predictive Control (MPC) framework and design a planning and control system to enable aggressive autonomous driving over uneven terrain.
- Through real-world experiments, the researchers demonstrate that their approach can complete off-road courses up to 22% faster than geometry-based methods while maintaining safe operation.
Plain English Explanation
Autonomous vehicles navigating off-road environments at high speeds face significant challenges due to the uneven terrain, such as hills, banks, and ditches. Traditional methods for predicting how the vehicle will interact with the terrain can be resource-intensive or overly simplistic, leading to safety issues at higher speeds.
The researchers in this study have developed a new approach that uses physics-based models to identify key constraints on the vehicle's movements. These constraints focus on preventing the vehicle from rolling over or getting stuck in ditches, which can be extremely dangerous for both the vehicle and its passengers. By incorporating these constraints into their Model Predictive Control (MPC) framework, the researchers have created a planning and control system that can navigate aggressive, high-speed off-road driving without requiring detailed information about the environment and its dynamics.
Through real-world testing, the researchers have demonstrated that their approach can navigate challenging off-road courses up to 22% faster than purely geometry-based methods, all while maintaining safe operation. This represents a significant advancement in the field of off-road autonomous driving and could pave the way for more capable and reliable self-driving vehicles in the future.
Technical Explanation
The researchers in this study have developed a physics-based framework for identifying traversability constraints that can mitigate the risk of rollover and ditch-crossing failures in high-speed off-road autonomous driving. Traditional approaches to this problem have relied on either semantic classification, resource-intensive dynamics models, or purely geometry-based methods, which can be insufficient at the operating speeds of 7-10 m/s considered in this work.
The core of the researchers' approach is the derivation of two fundamental traversability constraints: one focused on mitigating rollover risk and another on safe ditch-crossing. These constraints are designed to be fully parallelizable within the sample-based Model Predictive Control (MPC) framework, allowing for efficient real-time computation.
The researchers also present the design of their planning and control system, which implements these parallelized constraints in MPC and utilizes a low-level controller to meet the demands of aggressive driving over uneven terrain without requiring prior information about the environment and its dynamics.
Through extensive real-world experimentation, the researchers demonstrate that their approach can capture the fundamental elements of safe and aggressive autonomy over uneven terrain. Compared to geometry-based methods, their approach is able to complete off-road courses up to 22% faster while maintaining safe operation.
Critical Analysis
The researchers have made a significant contribution to the field of off-road autonomous driving by introducing a novel physics-based framework for identifying traversability constraints. Their approach shows promising results in terms of improving the safety and performance of high-speed autonomous navigation over uneven terrain.
However, the paper does not address several potential limitations and areas for further research. For instance, the researchers only consider a limited set of terrain geometries, such as hills, banks, and ditches. It would be valuable to explore the framework's applicability to a broader range of uneven terrain configurations, including more complex and dynamic environments.
Additionally, the paper does not provide a detailed analysis of the computational complexity and real-time performance of the proposed constraints and control system. As the system is designed for high-speed operation, it is essential to understand the scalability and resource requirements to ensure reliable deployment in real-world scenarios.
Further research could also investigate the robustness of the approach to sensor noise, environment changes, and other sources of uncertainty. Incorporating more advanced dynamics models or adaptive optimization techniques could also help improve the system's performance and safety under a wider range of operating conditions.
Conclusion
This paper presents a novel physics-based framework for identifying traversability constraints to enable safe and aggressive autonomous driving over uneven terrain at high speeds. By deriving constraints focused on mitigating rollover and ditch-crossing failures, and integrating them into a Model Predictive Control framework, the researchers have developed a planning and control system that can navigate challenging off-road courses up to 22% faster than traditional geometry-based methods.
The researchers' work represents a significant advancement in the field of off-road autonomy and could pave the way for more capable and reliable self-driving vehicles in the future. While the paper highlights several promising results, further research is needed to address potential limitations and expand the applicability of the approach to a broader range of uneven terrain configurations and operating conditions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Dynamics Models in the Aggressive Off-Road Driving Regime
Tyler Han, Sidharth Talia, Rohan Panicker, Preet Shah, Neel Jawale, Byron Boots
0
0
Current developments in autonomous off-road driving are steadily increasing performance through higher speeds and more challenging, unstructured environments. However, this operating regime subjects the vehicle to larger inertial effects, where consideration of higher-order states is necessary to avoid failures such as rollovers or excessive impact forces. Aggressive driving through Model Predictive Control (MPC) in these conditions requires dynamics models that accurately predict safety-critical information. This work aims to empirically quantify this aggressive operating regime and its effects on the performance of current models. We evaluate three dynamics models of varying complexity on two distinct off-road driving datasets: one simulated and the other real-world. By conditioning trajectory data on higher-order states, we show that model accuracy degrades with aggressiveness and simpler models degrade faster. These models are also validated across datasets, where accuracies over safety-critical states are reported and provide benchmarks for future work.
5/28/2024

Model Predictive Contouring Control for Vehicle Obstacle Avoidance at the Limit of Handling Using Torque Vectoring
Alberto Bertipaglia, Davide Tavernini, Umberto Montanaro, Mohsen Alirezaei, Riender Happee, Aldo Sorniotti, Barys Shyrokau
0
0
This paper presents an original approach to vehicle obstacle avoidance. It involves the development of a nonlinear Model Predictive Contouring Control, which uses torque vectoring to stabilise and drive the vehicle in evasive manoeuvres at the limit of handling. The proposed algorithm combines motion planning, path tracking and vehicle stability objectives, prioritising collision avoidance in emergencies. The controller's prediction model is a nonlinear double-track vehicle model based on an extended Fiala tyre to capture the nonlinear coupled longitudinal and lateral dynamics. The controller computes the optimal steering angle and the longitudinal forces per each of the four wheels to minimise tracking error in safe situations and maximise the vehicle-to-obstacle distance in emergencies. Thanks to the optimisation of the longitudinal tyre forces, the proposed controller can produce an extra yaw moment, increasing the vehicle's lateral agility to avoid obstacles while keeping the vehicle stable. The optimal forces are constrained in the tyre friction circle not to exceed the tyres and vehicle capabilities. In a high-fidelity simulation environment, we demonstrate the benefits of torque vectoring, showing that our proposed approach is capable of successfully avoiding obstacles and keeping the vehicle stable while driving a double-lane change manoeuvre, in comparison to baselines lacking torque vectoring or collision avoidance prioritisation.
5/20/2024

Traversability-aware Adaptive Optimization for Path Planning and Control in Mountainous Terrain
Se-Wook Yoo, E In Son, Seung-Woo Seo
0
0
Autonomous navigation in extreme mountainous terrains poses challenges due to the presence of mobility-stressing elements and undulating surfaces, making it particularly difficult compared to conventional off-road driving scenarios. In such environments, estimating traversability solely based on exteroceptive sensors often leads to the inability to reach the goal due to a high prevalence of non-traversable areas. In this paper, we consider traversability as a relative value that integrates the robot's internal state, such as speed and torque to exhibit resilient behavior to reach its goal successfully. We separate traversability into apparent traversability and relative traversability, then incorporate these distinctions in the optimization process of sampling-based planning and motion predictive control. Our method enables the robots to execute the desired behaviors more accurately while avoiding hazardous regions and getting stuck. Experiments conducted on simulation with 27 diverse types of mountainous terrain and real-world demonstrate the robustness of the proposed framework, with increasingly better performance observed in more complex environments.
4/5/2024
History-Aware Planning for Risk-free Autonomous Navigation on Unknown Uneven Terrain
Yinchuan Wang, Nianfei Du, Yongsen Qin, Xiang Zhang, Rui Song, Chaoqun Wang
0
0
It is challenging for the mobile robot to achieve autonomous and mapless navigation in the unknown environment with uneven terrain. In this study, we present a layered and systematic pipeline. At the local level, we maintain a tree structure that is dynamically extended with the navigation. This structure unifies the planning with the terrain identification. Besides, it contributes to explicitly identifying the hazardous areas on uneven terrain. In particular, certain nodes of the tree are consistently kept to form a sparse graph at the global level, which records the history of the exploration. A series of subgoals that can be obtained in the tree and the graph are utilized for leading the navigation. To determine a subgoal, we develop an evaluation method whose input elements can be efficiently obtained on the layered structure. We conduct both simulation and real-world experiments to evaluate the developed method and its key modules. The experimental results demonstrate the effectiveness and efficiency of our method. The robot can travel through the unknown uneven region safely and reach the target rapidly without a preconstructed map.
6/5/2024