Faster Model Predictive Control via Self-Supervised Initialization Learning

0

Sign in to get full access
Overview
- This paper proposes a technique to speed up Model Predictive Control (MPC) by using self-supervised learning to initialize the optimization process.
- MPC is a popular control method that optimizes a sequence of control actions to achieve a desired outcome, but it can be computationally expensive.
- The authors show that their self-supervised initialization method can significantly reduce the number of optimization iterations required, leading to faster MPC.
Plain English Explanation
Model Predictive Control (MPC) is a powerful control technique used in many applications, from robotics to power grids. MPC works by repeatedly solving an optimization problem to determine the best sequence of control actions to take. However, solving this optimization problem can be computationally intensive, which can limit the speed and responsiveness of MPC systems.
The key idea in this paper is to use self-supervised learning to pre-train the MPC optimization process. The authors train a neural network to predict good initial guesses for the control sequence, based on the current state of the system. This pre-trained network can then be used to "warm start" the MPC optimization, significantly reducing the number of iterations required to find the optimal solution.
By reducing the computational burden of the MPC optimization, this self-supervised initialization technique can speed up the overall MPC process, making it more practical for real-time applications that require fast decision-making. This could benefit a wide range of fields, from robotics to power systems, where MPC is widely used.
Technical Explanation
The authors propose a self-supervised initialization learning approach to accelerate Model Predictive Control (MPC). In traditional MPC, the control sequence is optimized at each step by solving a constrained optimization problem, which can be computationally expensive.
The key insight of this work is to pre-train a neural network to predict good initial guesses for the control sequence, based on the current state of the system. The network is trained in a self-supervised manner, using the optimal control sequences obtained from solving the MPC optimization problem as the target outputs.
During deployment, the pre-trained network is used to warm start the MPC optimization, providing a good initial guess for the control sequence. This significantly reduces the number of optimization iterations required to find the optimal solution, leading to faster MPC.
The authors evaluate their approach on several benchmark control problems, including cart-pole balancing and quadrotor control. The results show that their self-supervised initialization method can reduce the MPC optimization time by up to 80% compared to a cold-started optimization, without sacrificing control performance.
Critical Analysis
The authors present a compelling approach to accelerating Model Predictive Control, which is an important and widely used control technique. By leveraging self-supervised learning to warm start the MPC optimization, they are able to significantly reduce the computational burden without compromising control performance.
One potential limitation of the approach is that it requires an initial set of optimal control sequences to train the neural network. In some cases, obtaining these optimal sequences may be challenging or computationally expensive itself. The authors acknowledge this and suggest that techniques like reinforcement learning could be used to generate the training data in a more automated way.
Additionally, the performance of the self-supervised initialization method may depend on the complexity of the control problem and the accuracy of the system model. Further research may be needed to understand the robustness of the approach to model uncertainties or highly nonlinear dynamics.
Overall, this work represents an interesting and promising direction for improving the efficiency of Model Predictive Control, with potential applications in a wide range of domains. As the authors suggest, combining this approach with other MPC acceleration techniques, such as differentiable MPC or actor-critic MPC, could lead to even greater performance gains.
Conclusion
This paper presents a novel technique to accelerate Model Predictive Control by using self-supervised learning to initialize the optimization process. By training a neural network to predict good initial guesses for the control sequence, the authors are able to significantly reduce the number of optimization iterations required, leading to faster MPC.
This approach has the potential to improve the real-time performance and practical applicability of MPC in a wide range of domains, from robotics to power systems. The authors demonstrate the effectiveness of their method on several benchmark control problems, and suggest ways to further enhance the technique through the integration of other MPC acceleration strategies.
Overall, this work represents an important contribution to the field of control systems, showcasing how advances in machine learning can be leveraged to enhance the efficiency of classical control algorithms like Model Predictive Control.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Faster Model Predictive Control via Self-Supervised Initialization Learning
Zhaoxin Li, Letian Chen, Rohan Paleja, Subramanya Nageshrao, Matthew Gombolay
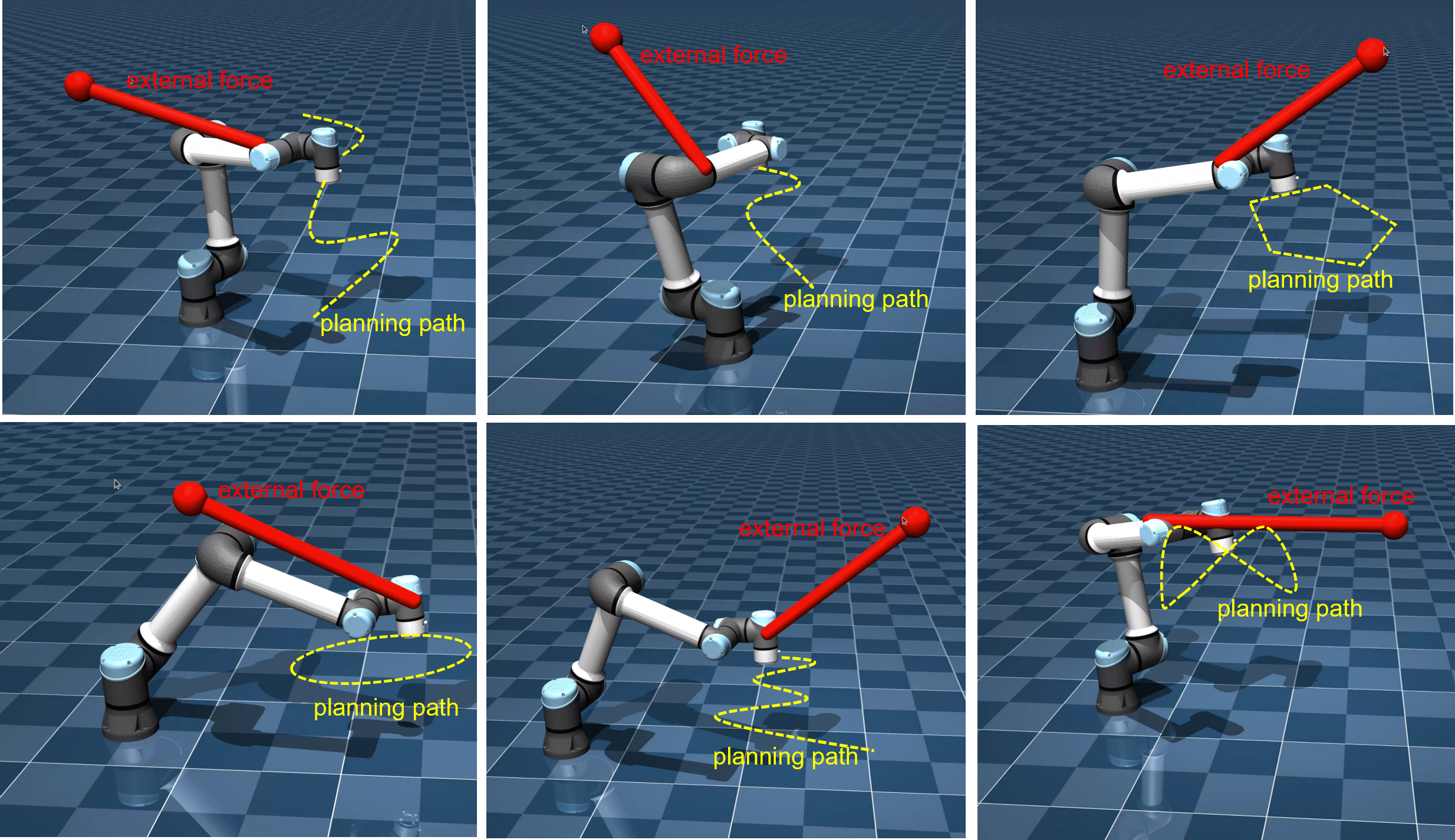
Optimization for robot control tasks, spanning various methodologies, includes Model Predictive Control (MPC). However, the complexity of the system, such as non-convex and non-differentiable cost functions and prolonged planning horizons often drastically increases the computation time, limiting MPC's real-world applicability. Prior works in speeding up the optimization have limitations on solving convex problem and generalizing to hold out domains. To overcome this challenge, we develop a novel framework aiming at expediting optimization processes. In our framework, we combine offline self-supervised learning and online fine-tuning through reinforcement learning to improve the control performance and reduce optimization time. We demonstrate the effectiveness of our method on a novel, challenging Formula-1-track driving task, achieving 3.9% higher performance in optimization time and 3.6% higher performance in tracking accuracy on challenging holdout tracks.
Read more8/9/2024

0
On Building Myopic MPC Policies using Supervised Learning
Christopher A. Orrico, Bokan Yang, Dinesh Krishnamoorthy
The application of supervised learning techniques in combination with model predictive control (MPC) has recently generated significant interest, particularly in the area of approximate explicit MPC, where function approximators like deep neural networks are used to learn the MPC policy via optimal state-action pairs generated offline. While the aim of approximate explicit MPC is to closely replicate the MPC policy, substituting online optimization with a trained neural network, the performance guarantees that come with solving the online optimization problem are typically lost. This paper considers an alternative strategy, where supervised learning is used to learn the optimal value function offline instead of learning the optimal policy. This can then be used as the cost-to-go function in a myopic MPC with a very short prediction horizon, such that the online computation burden reduces significantly without affecting the controller performance. This approach differs from existing work on value function approximations in the sense that it learns the cost-to-go function by using offline-collected state-value pairs, rather than closed-loop performance data. The cost of generating the state-value pairs used for training is addressed using a sensitivity-based data augmentation scheme.
Read more8/12/2024
📈
0
Differentiable Robust Model Predictive Control
Alex Oshin, Hassan Almubarak, Evangelos A. Theodorou
Deterministic model predictive control (MPC), while powerful, is often insufficient for effectively controlling autonomous systems in the real-world. Factors such as environmental noise and model error can cause deviations from the expected nominal performance. Robust MPC algorithms aim to bridge this gap between deterministic and uncertain control. However, these methods are often excessively difficult to tune for robustness due to the nonlinear and non-intuitive effects that controller parameters have on performance. To address this challenge, we first present a unifying perspective on differentiable optimization for control using the implicit function theorem (IFT), from which existing state-of-the art methods can be derived. Drawing parallels with differential dynamic programming, the IFT enables the derivation of an efficient differentiable optimal control framework. The derived scheme is subsequently paired with a tube-based MPC architecture to facilitate the automatic and real-time tuning of robust controllers in the presence of large uncertainties and disturbances. The proposed algorithm is benchmarked on multiple nonlinear robotic systems, including two systems in the MuJoCo simulator environment and one hardware experiment on the Robotarium testbed, to demonstrate its efficacy.
Read more7/29/2024
0
Self-Adaptive Robust Motion Planning for High DoF Robot Manipulator using Deep MPC
Ye Zhang, Kangtong Mo, Fangzhou Shen, Xuanzhen Xu, Xingyu Zhang, Jiayue Yu, Chang Yu
In contemporary control theory, self-adaptive methodologies are highly esteemed for their inherent flexibility and robustness in managing modeling uncertainties. Particularly, robust adaptive control stands out owing to its potent capability of leveraging robust optimization algorithms to approximate cost functions and relax the stringent constraints often associated with conventional self-adaptive control paradigms. Deep learning methods, characterized by their extensive layered architecture, offer significantly enhanced approximation prowess. Notwithstanding, the implementation of deep learning is replete with challenges, particularly the phenomena of vanishing and exploding gradients encountered during the training process. This paper introduces a self-adaptive control scheme integrating a deep MPC, governed by an innovative weight update law designed to mitigate the vanishing and exploding gradient predicament by employing the gradient sign exclusively. The proffered controller is a self-adaptive dynamic inversion mechanism, integrating an augmented state observer within an auxiliary estimation circuit to enhance the training phase. This approach enables the deep MPC to learn the entire plant model in real-time and the efficacy of the controller is demonstrated through simulations involving a high-DoF robot manipulator, wherein the controller adeptly learns the nonlinear plant dynamics expeditiously and exhibits commendable performance in the motion planning task.
Read more7/19/2024