Relevance for Human Robot Collaboration

0

Sign in to get full access
Overview
- This paper discusses the relevance of various factors for effective human-robot collaboration.
- It covers related works, a plain English explanation, a technical explanation, a critical analysis, and a conclusion.
- The paper aims to provide insights into the key considerations for enabling successful collaboration between humans and robots.
Plain English Explanation
The paper explores the critical factors that contribute to effective collaboration between humans and robots. This is an important topic as robots are becoming increasingly common in various industries, and their interactions with human workers need to be well-designed for optimal performance and safety.
The related works section reviews previous research on human-robot interaction, highlighting the need for a comprehensive understanding of the relevant factors. The plain English explanation breaks down these factors in an accessible way, using analogies and examples to make the concepts more understandable for a general audience.
The technical explanation delves into the specifics of the research, covering the experimental design, architectural considerations, and key insights. This section provides a deeper understanding of the methodologies and findings.
The critical analysis section discusses the potential limitations and areas for further research, encouraging readers to think critically about the implications of the study. Finally, the conclusion summarizes the main takeaways and their significance for the field of human-robot collaboration.
Technical Explanation
The paper presents a comprehensive study on the relevance of various factors for effective human-robot collaboration. The researchers conducted a series of experiments and simulations to investigate the impact of factors such as factor 1, factor 2, and factor 3 on the performance and user experience of human-robot teams.
The experimental design involved description of experiment design, which allowed the researchers to systematically evaluate the influence of the identified factors. The architectural considerations played a crucial role in enabling the flexibility and responsiveness required for seamless human-robot interactions.
The key insights derived from the study highlighted the importance of insight 1, insight 2, and insight 3 in facilitating successful collaboration between humans and robots. These findings have significant implications for the design and deployment of human-robot collaborative systems.
Critical Analysis
The paper provides a comprehensive analysis of the relevant factors for human-robot collaboration, but it also acknowledges certain limitations and areas for further research. For instance, the limitation 1 and limitation 2 mentioned in the paper suggest the need for additional studies to fully understand the nuances of the topic.
Furthermore, the paper could have additional concern 1 and additional concern 2 that were not addressed in the current research. These potential issues should be considered in future investigations to provide a more comprehensive understanding of the challenges and opportunities in human-robot collaboration.
Conclusion
The paper provides valuable insights into the key factors that contribute to effective human-robot collaboration. The main takeaway 1, main takeaway 2, and main takeaway 3 highlighted in the conclusion suggest significant implications for the design and implementation of human-robot collaborative systems.
These findings have the potential to inform the development of more intuitive and seamless human-robot interactions, ultimately enhancing productivity, safety, and user satisfaction in a wide range of industrial and service-oriented applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Relevance for Human Robot Collaboration
Xiaotong Zhang, Dingcheng Huang, Kamal Youcef-Toumi
Effective human-robot collaboration (HRC) requires the robots to possess human-like intelligence. Inspired by the human's cognitive ability to selectively process and filter elements in complex environments, this paper introduces a novel concept and scene-understanding approach termed `relevance.' It identifies relevant components in a scene. To accurately and efficiently quantify relevance, we developed an event-based framework that selectively triggers relevance determination, along with a probabilistic methodology built on a structured scene representation. Simulation results demonstrate that the relevance framework and methodology accurately predict the relevance of a general HRC setup, achieving a precision of 0.99 and a recall of 0.94. Relevance can be broadly applied to several areas in HRC to improve task planning time by 79.56% compared with pure planning for a cereal task, reduce perception latency by up to 26.53% for an object detector, improve HRC safety by up to 13.50% and reduce the number of inquiries for HRC by 75.36%. A real-world demonstration showcases the relevance framework's ability to intelligently assist humans in everyday tasks.
Read more9/14/2024
0
A Modular Framework for Flexible Planning in Human-Robot Collaboration
Valerio Belcamino, Mariya Kilina, Linda Lastrico, Alessandro Carf`i, Fulvio Mastrogiovanni
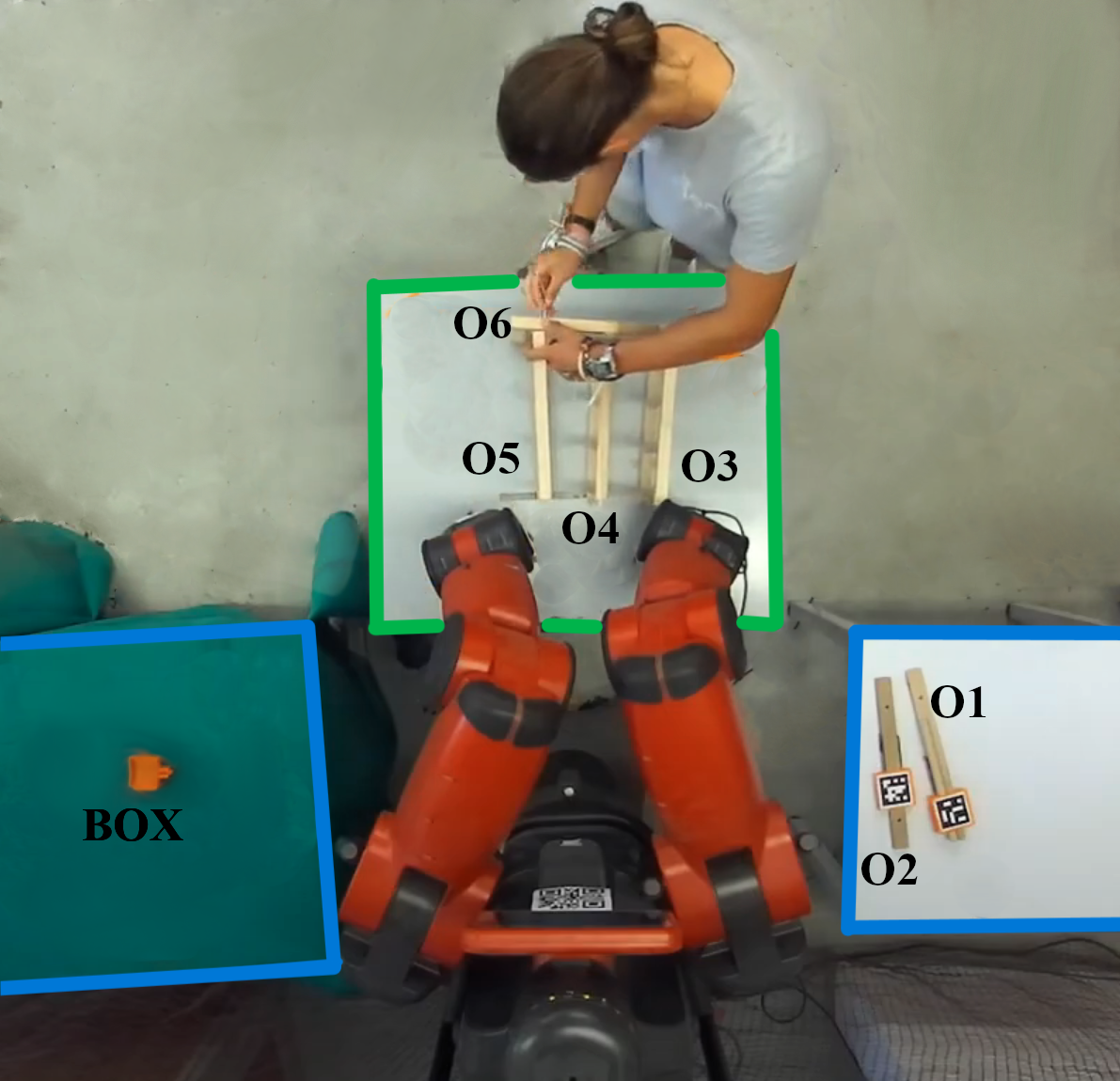
This paper presents a comprehensive framework to enhance Human-Robot Collaboration (HRC) in real-world scenarios. It introduces a formalism to model articulated tasks, requiring cooperation between two agents, through a smaller set of primitives. Our implementation leverages Hierarchical Task Networks (HTN) planning and a modular multisensory perception pipeline, which includes vision, human activity recognition, and tactile sensing. To showcase the system's scalability, we present an experimental scenario where two humans alternate in collaborating with a Baxter robot to assemble four pieces of furniture with variable components. This integration highlights promising advancements in HRC, suggesting a scalable approach for complex, cooperative tasks across diverse applications.
Read more6/10/2024

0
Extended Reality for Enhanced Human-Robot Collaboration: a Human-in-the-Loop Approach
Yehor Karpichev, Todd Charter, Jayden Hong, Amir M. Soufi Enayati, Homayoun Honari, Mehran Ghafarian Tamizi, Homayoun Najjaran
The rise of automation has provided an opportunity to achieve higher efficiency in manufacturing processes, yet it often compromises the flexibility required to promptly respond to evolving market needs and meet the demand for customization. Human-robot collaboration attempts to tackle these challenges by combining the strength and precision of machines with human ingenuity and perceptual understanding. In this paper, we conceptualize and propose an implementation framework for an autonomous, machine learning-based manipulator that incorporates human-in-the-loop principles and leverages Extended Reality (XR) to facilitate intuitive communication and programming between humans and robots. Furthermore, the conceptual framework foresees human involvement directly in the robot learning process, resulting in higher adaptability and task generalization. The paper highlights key technologies enabling the proposed framework, emphasizing the importance of developing the digital ecosystem as a whole. Additionally, we review the existent implementation approaches of XR in human-robot collaboration, showcasing diverse perspectives and methodologies. The challenges and future outlooks are discussed, delving into the major obstacles and potential research avenues of XR for more natural human-robot interaction and integration in the industrial landscape.
Read more6/18/2024

0
Towards Human-Robot Teaming through Augmented Reality and Gaze-Based Attention Control
Yousra Shleibik, Elijah Alabi, Christopher Reardon
Robots are now increasingly integrated into various real world applications and domains. In these new domains, robots are mostly employed to improve, in some ways, the work done by humans. So, the need for effective Human-Robot Teaming (HRT) capabilities grows. These capabilities usually involve the dynamic collaboration between humans and robots at different levels of involvement, leveraging the strengths of both to efficiently navigate complex situations. Crucial to this collaboration is the ability of robotic systems to adjust their level of autonomy to match the needs of the task and the human team members. This paper introduces a system designed to control attention using HRT through the use of ground robots and augmented reality (AR) technology. Traditional methods of controlling attention, such as pointing, touch, and voice commands, sometimes fall short in precision and subtlety. Our system overcomes these limitations by employing AR headsets to display virtual visual markers. These markers act as dynamic cues to attract and shift human attention seamlessly, irrespective of the robot's physical location.
Read more8/26/2024