Extended Reality for Enhanced Human-Robot Collaboration: a Human-in-the-Loop Approach
2403.14597
0
0

Abstract
The rise of automation has provided an opportunity to achieve higher efficiency in manufacturing processes, yet it often compromises the flexibility required to promptly respond to evolving market needs and meet the demand for customization. Human-robot collaboration attempts to tackle these challenges by combining the strength and precision of machines with human ingenuity and perceptual understanding. In this paper, we conceptualize and propose an implementation framework for an autonomous, machine learning-based manipulator that incorporates human-in-the-loop principles and leverages Extended Reality (XR) to facilitate intuitive communication and programming between humans and robots. Furthermore, the conceptual framework foresees human involvement directly in the robot learning process, resulting in higher adaptability and task generalization. The paper highlights key technologies enabling the proposed framework, emphasizing the importance of developing the digital ecosystem as a whole. Additionally, we review the existent implementation approaches of XR in human-robot collaboration, showcasing diverse perspectives and methodologies. The challenges and future outlooks are discussed, delving into the major obstacles and potential research avenues of XR for more natural human-robot interaction and integration in the industrial landscape.
Create account to get full access
Overview
- This research paper explores the use of extended reality (XR) technologies, which include virtual reality (VR), augmented reality (AR), and mixed reality (MR), to enhance human-robot collaboration.
- The proposed framework employs a "human-in-the-loop" approach, where humans actively participate in the control and decision-making processes of the robotic system.
- The goal is to improve the efficiency, effectiveness, and safety of human-robot interactions in various applications, such as manufacturing, assembly, and maintenance tasks.
Plain English Explanation
The paper looks at how we can use advanced digital technologies, like virtual reality (VR), augmented reality (AR), and mixed reality (MR), to help people work better with robots. The key idea is to put the human "in the loop" - meaning people can actively control and make decisions about what the robots are doing, rather than just watching them.
The researchers think this will make human-robot collaboration more efficient, effective, and safe in all kinds of applications, like manufacturing, assembly, and maintenance tasks. For example, a worker could use an AR headset to see instructions and information overlaid on the real-world robot they're working with, allowing them to coordinate better.
Technical Explanation
The paper presents a framework that leverages extended reality (XR) technologies to enhance human-robot collaboration through a "human-in-the-loop" approach. This approach allows humans to actively participate in the control and decision-making processes of the robotic system, rather than just passively observing.
The framework consists of several key components:
- Human-Robot Interface: This interface allows the human to monitor, control, and provide input to the robot using XR devices, such as VR headsets, AR glasses, or handheld controllers.
- Robotic System: The robotic system performs the physical tasks, with the human providing guidance and oversight through the XR interface.
- Shared Perception and Cognition: The framework enables a shared understanding between the human and the robot, with information and sensory data seamlessly exchanged between them.
- Collaborative Task Planning and Execution: The human and robot work together to plan and execute tasks, with the human providing high-level decision-making and the robot handling low-level execution.
The researchers describe how this framework can be applied to various use cases, such as collaborative assembly and manufacturing tasks, human-drone navigation and interaction, and flexible planning for human-robot collaboration.
Critical Analysis
The paper provides a comprehensive conceptual framework for integrating XR technologies into human-robot collaboration. However, the authors acknowledge that significant technical and practical challenges remain in implementing this approach in real-world settings.
For example, the seamless integration of perception, cognition, and decision-making between humans and robots requires advancements in areas like natural language processing, multimodal sensing, and adaptive planning. Additionally, the widespread adoption of such systems may face social, ethical, and regulatory hurdles that need to be carefully considered.
Further research and experimentation are necessary to validate the effectiveness of this framework and address the practical limitations. Ongoing collaboration between human-robot interaction experts, XR developers, and domain-specific practitioners will be crucial in refining and deploying these technologies in real-world applications.
Conclusion
This research paper presents a promising framework for leveraging extended reality (XR) technologies to enhance human-robot collaboration through a "human-in-the-loop" approach. By enabling seamless integration of human input, perception, and decision-making with robotic systems, the proposed framework aims to improve the efficiency, effectiveness, and safety of various applications, from manufacturing and assembly to maintenance and beyond.
While significant technical and practical challenges remain, the conceptual foundation laid in this work could pave the way for further advancements in the field of human-robot interaction, ultimately leading to more natural and effective collaborations between humans and machines.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Designs for Enabling Collaboration in Human-Machine Teaming via Interactive and Explainable Systems
Rohan Paleja, Michael Munje, Kimberlee Chang, Reed Jensen, Matthew Gombolay
0
0
Collaborative robots and machine learning-based virtual agents are increasingly entering the human workspace with the aim of increasing productivity and enhancing safety. Despite this, we show in a ubiquitous experimental domain, Overcooked-AI, that state-of-the-art techniques for human-machine teaming (HMT), which rely on imitation or reinforcement learning, are brittle and result in a machine agent that aims to decouple the machine and human's actions to act independently rather than in a synergistic fashion. To remedy this deficiency, we develop HMT approaches that enable iterative, mixed-initiative team development allowing end-users to interactively reprogram interpretable AI teammates. Our 50-subject study provides several findings that we summarize into guidelines. While all approaches underperform a simple collaborative heuristic (a critical, negative result for learning-based methods), we find that white-box approaches supported by interactive modification can lead to significant team development, outperforming white-box approaches alone, and black-box approaches are easier to train and result in better HMT performance highlighting a tradeoff between explainability and interactivity versus ease-of-training. Together, these findings present three important directions: 1) Improving the ability to generate collaborative agents with white-box models, 2) Better learning methods to facilitate collaboration rather than individualized coordination, and 3) Mixed-initiative interfaces that enable users, who may vary in ability, to improve collaboration.
6/10/2024
A Modular Framework for Flexible Planning in Human-Robot Collaboration
Valerio Belcamino, Mariya Kilina, Linda Lastrico, Alessandro Carf`i, Fulvio Mastrogiovanni
0
0
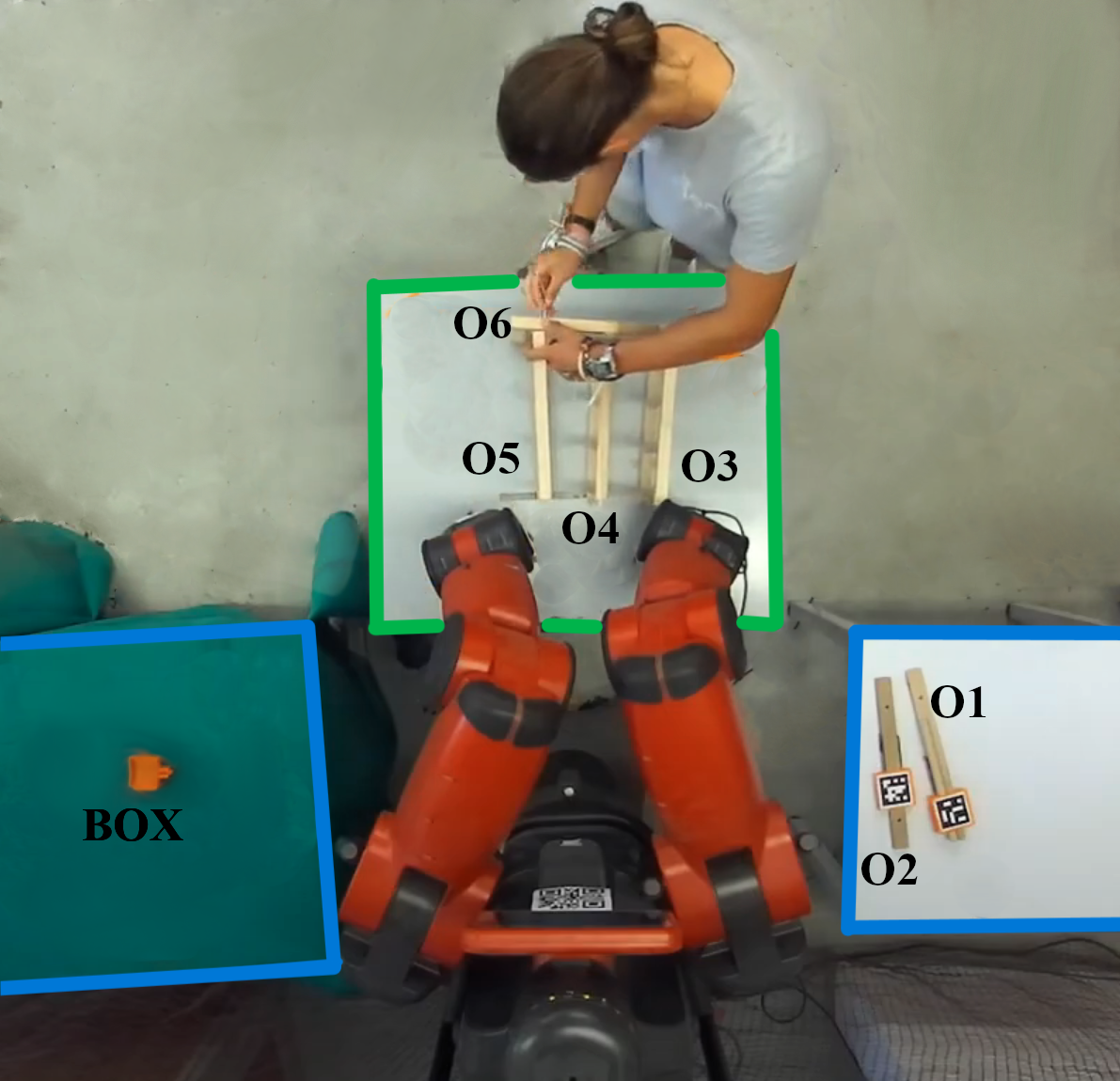
This paper presents a comprehensive framework to enhance Human-Robot Collaboration (HRC) in real-world scenarios. It introduces a formalism to model articulated tasks, requiring cooperation between two agents, through a smaller set of primitives. Our implementation leverages Hierarchical Task Networks (HTN) planning and a modular multisensory perception pipeline, which includes vision, human activity recognition, and tactile sensing. To showcase the system's scalability, we present an experimental scenario where two humans alternate in collaborating with a Baxter robot to assemble four pieces of furniture with variable components. This integration highlights promising advancements in HRC, suggesting a scalable approach for complex, cooperative tasks across diverse applications.
6/10/2024
📈
Enhancing the LLM-Based Robot Manipulation Through Human-Robot Collaboration
Haokun Liu, Yaonan Zhu, Kenji Kato, Atsushi Tsukahara, Izumi Kondo, Tadayoshi Aoyama, Yasuhisa Hasegawa
0
0
Large Language Models (LLMs) are gaining popularity in the field of robotics. However, LLM-based robots are limited to simple, repetitive motions due to the poor integration between language models, robots, and the environment. This paper proposes a novel approach to enhance the performance of LLM-based autonomous manipulation through Human-Robot Collaboration (HRC). The approach involves using a prompted GPT-4 language model to decompose high-level language commands into sequences of motions that can be executed by the robot. The system also employs a YOLO-based perception algorithm, providing visual cues to the LLM, which aids in planning feasible motions within the specific environment. Additionally, an HRC method is proposed by combining teleoperation and Dynamic Movement Primitives (DMP), allowing the LLM-based robot to learn from human guidance. Real-world experiments have been conducted using the Toyota Human Support Robot for manipulation tasks. The outcomes indicate that tasks requiring complex trajectory planning and reasoning over environments can be efficiently accomplished through the incorporation of human demonstrations.
7/2/2024
⛏️
Spatial Assisted Human-Drone Collaborative Navigation and Interaction through Immersive Mixed Reality
Luca Morando, Giuseppe Loianno
0
0
Aerial robots have the potential to play a crucial role in assisting humans with complex and dangerous tasks. Nevertheless, the future industry demands innovative solutions to streamline the interaction process between humans and drones to enable seamless collaboration and efficient co-working. In this paper, we present a novel tele-immersive framework that promotes cognitive and physical collaboration between humans and robots through Mixed Reality (MR). This framework incorporates a novel bi-directional spatial awareness and a multi-modal virtual-physical interaction approaches. The former seamlessly integrates the physical and virtual worlds, offering bidirectional egocentric and exocentric environmental representations. The latter, leveraging the proposed spatial representation, further enhances the collaboration combining a robot planning algorithm for obstacle avoidance with a variable admittance control. This allows users to issue commands based on virtual forces while maintaining compatibility with the environment map. We validate the proposed approach by performing several collaborative planning and exploration tasks involving a drone and an user equipped with a MR headset.
4/9/2024