Resolution Limit of Single-Photon LiDAR

0

Sign in to get full access
Overview
- This paper explores the resolution limit of single-photon LiDAR systems, which are advanced 3D imaging technologies that use single photons to measure distances.
- The researchers investigate the fundamental factors that limit the spatial resolution of single-photon LiDAR, providing insights into improving the performance of these systems.
- The paper presents a mathematical model to analyze the photon arrival statistics and derive expressions for the resolution limit, considering factors like target reflectivity, detector noise, and system parameters.
Plain English Explanation
Single-photon LiDAR is a powerful 3D imaging technology that works by emitting and detecting individual light particles, or photons, to measure distances. This allows these systems to create highly detailed 3D maps of their surroundings, even in low-light conditions.
However, there are limits to how well single-photon LiDAR can discern fine details and small objects. This paper delves into the fundamental factors that restrict the spatial resolution of these systems. The researchers developed a mathematical model to analyze how photons arrive and are detected, and used this to derive expressions for the maximum achievable resolution.
The model takes into account things like the reflectivity of the target object, the amount of background noise in the detector, and the specific design parameters of the LiDAR system. By understanding these underlying limitations, the researchers hope to provide guidance on how single-photon LiDAR technology can be improved to overcome resolution constraints and capture even finer details.
Technical Explanation
The paper begins by establishing the background on photon arrival statistics in single-photon LiDAR. The researchers present a pulse model that describes the distribution of photons reflected from a target object over time. This statistical framework is then used to derive expressions for the range and angular resolution limits of the system.
The range resolution limit is shown to depend on factors like the target reflectivity, background light levels, and detector noise. Higher reflectivity and lower noise improve the range resolution, allowing the system to distinguish between objects at very close distances.
Similarly, the angular resolution limit is analyzed, revealing dependencies on the optical aperture size, beam divergence, and other system parameters. Increasing the aperture size and reducing beam divergence can enhance the angular resolution for better lateral discrimination of targets.
The researchers validate their theoretical model through numerical simulations, demonstrating how the predicted resolution limits align with realistic single-photon LiDAR performance. They also discuss practical considerations like the impact of multiple return signals and the need to optimize system design for specific applications.
Critical Analysis
The paper provides a rigorous mathematical framework for understanding the fundamental limits of single-photon LiDAR resolution. By deriving closed-form expressions, the researchers offer valuable insights that can guide the future development of these imaging systems.
However, the analysis is limited to idealized scenarios and does not fully account for real-world complexities. For example, the model assumes a single, isolated target, whereas actual environments may contain multiple objects at varying distances and reflectivities. Incorporating these factors into the statistical framework could yield a more comprehensive understanding of resolution limits.
Additionally, the paper does not explore the potential trade-offs between range and angular resolution. In practice, system designers may need to balance these two aspects based on the specific application requirements. Further analysis on optimizing this balance would be beneficial.
While the theoretical derivations are sound, the validation through simulations could be strengthened by comparisons to experimental data from real single-photon LiDAR prototypes. This would help bridge the gap between the theoretical model and practical implementation challenges.
Conclusion
This paper presents a rigorous analysis of the resolution limits in single-photon LiDAR systems, offering valuable insights into the fundamental factors that constrain their performance. By developing a statistical model of photon arrival and deriving expressions for range and angular resolution, the researchers provide a framework for understanding and potentially overcoming these limitations.
The findings can inform the design and optimization of single-photon LiDAR systems, guiding efforts to improve their spatial resolution and enable even more detailed 3D imaging. As these technologies continue to advance, this work contributes to the broader understanding of the capabilities and constraints of single-photon-based remote sensing.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Resolution Limit of Single-Photon LiDAR
Stanley H. Chan, Hashan K. Weerasooriya, Weijian Zhang, Pamela Abshire, Istvan Gyongy, Robert K. Henderson
Single-photon Light Detection and Ranging (LiDAR) systems are often equipped with an array of detectors for improved spatial resolution and sensing speed. However, given a fixed amount of flux produced by the laser transmitter across the scene, the per-pixel Signal-to-Noise Ratio (SNR) will decrease when more pixels are packed in a unit space. This presents a fundamental trade-off between the spatial resolution of the sensor array and the SNR received at each pixel. Theoretical characterization of this fundamental limit is explored. By deriving the photon arrival statistics and introducing a series of new approximation techniques, the Mean Squared Error (MSE) of the maximum-likelihood estimator of the time delay is derived. The theoretical predictions align well with simulations and real data.
Read more4/3/2024
💬
0
Identity-enabled CDMA LiDAR for massively parallel ranging with a single-element receiver
Yixiu Shen, Zi Heng Lim, Guangya Zhou
Light detection and ranging (LiDAR) have emerged as a crucial tool for high-resolution 3D imaging, particularly in autonomous vehicles, remote sensing, and augmented reality. However, the increasing demand for faster acquisition speed and higher resolution in LiDAR systems has highlighted the limitations of traditional mechanical scanning methods. This study introduces a novel wavelength-multiplexed code-division multiple access (CDMA) parallel laser ranging approach with a single-pixel receiver to address these challenges. By leveraging the unique properties of Gold-sequences in a direct-sequence spread spectrum (DSSS) framework, our design enables comprehensive parallelization in detection and ranging activities to significantly enhance system efficiency and user capacity. The proposed coaxial architecture simplifies hardware requirements using a single avalanche photodiode (APD) for multi-reception, reducing susceptibility to ambient noise and external interferences. We demonstrate 3D imaging at 5 m and 10 m, and the experimental results highlight the capability of our CDMA LiDAR system to achieve 40 parallel ranging channels with centimeter-level depth resolution and an angular resolution of 0.03 degree. Furthermore, our system allows for user identification modulation, enabling identity-based ranging among different users. The robustness of our proposed system against interference and speckle noise and near-far signal problems, combined with its potential for miniaturization and integration into chip-scale optics, presents a promising avenue to develop high-performance, compact LiDAR systems suitable for commercial applications.
Read more7/11/2024

0
Errors in single pixel photography emerging from light collection limits by the bucket detector
Dennis Scheidt, Pedro A. Quinto-Su
In single pixel photography an image is sampled with a programmable optical element like a digital micromirror array or a spatial light modulator that can project an orthogonal base. The light reflected or diffracted is collected by a lens and measured with a photodiode (bucket detector). In this work we demonstrate that single pixel photography that uses sampling bases with non-zero off-diagonal elements (i.e. Hadamard), can be susceptible to errors that emerge from the relative size of the bucket detector area compared with the spatial spread of the Fourier spectrum of the base element that has the the highest spatial frequency. Experiments with a spatial light modulator and simulations using a Hadamard basis show that if the bucket detector area is smaller than between $50-75%$ of the maximum area spanned by the projected spectrum of the measurement basis, the reconstructed photograph will exhibit cross-talk with the effective phase of the optical system. The phase can be encoded or errors can be introduced in the optical system to demonstrate this effect.
Read more4/17/2024
0
Analysis and Improvement of Rank-Ordered Mean Algorithm in Single-Photon LiDAR
William C. Yau, Weijian Zhang, Hashan Kavinga Weerasooriya, Stanley H. Chan
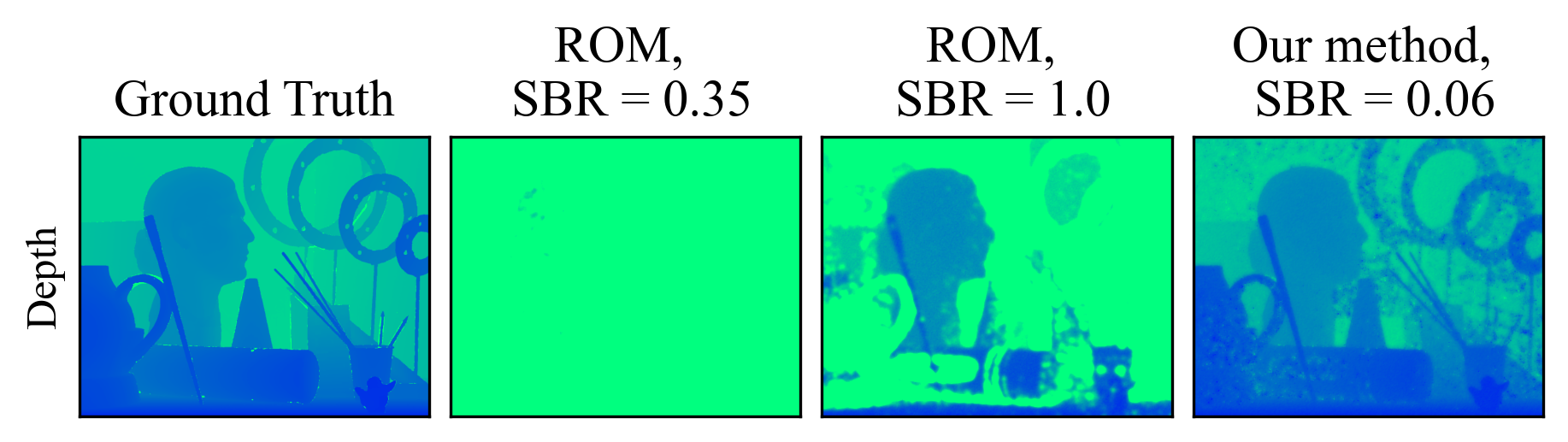
Depth estimation using a single-photon LiDAR is often solved by a matched filter. It is, however, error-prone in the presence of background noise. A commonly used technique to reject background noise is the rank-ordered mean (ROM) filter previously reported by Shin textit{et al.} (2015). ROM rejects noisy photon arrival timestamps by selecting only a small range of them around the median statistics within its local neighborhood. Despite the promising performance of ROM, its theoretical performance limit is unknown. In this paper, we theoretically characterize the ROM performance by showing that ROM fails when the reflectivity drops below a threshold predetermined by the depth and signal-to-background ratio, and its accuracy undergoes a phase transition at the cutoff. Based on our theory, we propose an improved signal extraction technique by selecting tight timestamp clusters. Experimental results show that the proposed algorithm improves depth estimation performance over ROM by 3 orders of magnitude at the same signal intensities, and achieves high image fidelity at noise levels as high as 17 times that of signal.
Read more7/31/2024