Analysis and Improvement of Rank-Ordered Mean Algorithm in Single-Photon LiDAR

0
Sign in to get full access
Overview
- Rank-ordered mean (ROM) algorithm for depth estimation in single-photon LiDAR 3-D imaging
- Improvements to the ROM algorithm for better performance in low-light conditions
- The work was supported by DARPA, NSF, and conducted at Purdue University
Plain English Explanation
The paper focuses on improving an algorithm called the rank-ordered mean (ROM) algorithm used for depth estimation in single-photon LiDAR 3-D imaging. LiDAR is a technology that uses laser light to create 3D maps of the environment.
The researchers wanted to improve the ROM algorithm's performance in low-light conditions, where Poisson noise can degrade the depth estimates. They used convex optimization techniques to refine the algorithm and make it more robust to noise.
The improved ROM algorithm could lead to better 3D imaging in applications like autonomous vehicles, robotics, and surveillance, where accurate depth information is crucial.
Technical Explanation
The paper presents an analysis and improvement of the rank-ordered mean (ROM) algorithm for depth estimation in single-photon LiDAR 3-D imaging. The ROM algorithm is a computationally efficient method for depth estimation that works well in bright lighting conditions.
However, in low-light conditions, Poisson noise can degrade the depth estimates. The researchers used convex optimization techniques to refine the ROM algorithm and improve its robustness to noise. Specifically, they formulated the depth estimation problem as a convex optimization problem and derived an efficient algorithm to solve it.
The improved ROM algorithm was evaluated on both simulated and real data, and the results showed significant improvements in depth estimation accuracy compared to the original ROM algorithm, especially in low-light conditions.
Critical Analysis
The paper provides a valuable contribution to the field of computational imaging and low-light imaging using single-photon LiDAR. The proposed improvements to the ROM algorithm address an important practical limitation of the original algorithm, namely its sensitivity to Poisson noise in low-light conditions.
However, the paper does not explore the computational complexity of the improved algorithm or its real-time performance in practical applications. These aspects would be important to consider for deploying the algorithm in real-world systems, such as autonomous vehicles or robotic platforms.
Additionally, the paper could have provided more experimental validation of the algorithm's performance under a wider range of conditions, such as different scene complexities, object reflectivities, and background illumination levels.
Conclusion
This paper presents an important improvement to the rank-ordered mean (ROM) algorithm for depth estimation in single-photon LiDAR 3-D imaging. The researchers used convex optimization techniques to make the algorithm more robust to Poisson noise in low-light conditions, which is a common challenge in computational imaging and low-light imaging applications.
The improved ROM algorithm could lead to better 3D imaging performance in a variety of real-world applications, such as autonomous vehicles, robotics, and surveillance, where accurate depth information is crucial. Further research on the algorithm's computational complexity, real-time performance, and broader experimental validation would help to fully assess its practical implications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Analysis and Improvement of Rank-Ordered Mean Algorithm in Single-Photon LiDAR
William C. Yau, Weijian Zhang, Hashan Kavinga Weerasooriya, Stanley H. Chan
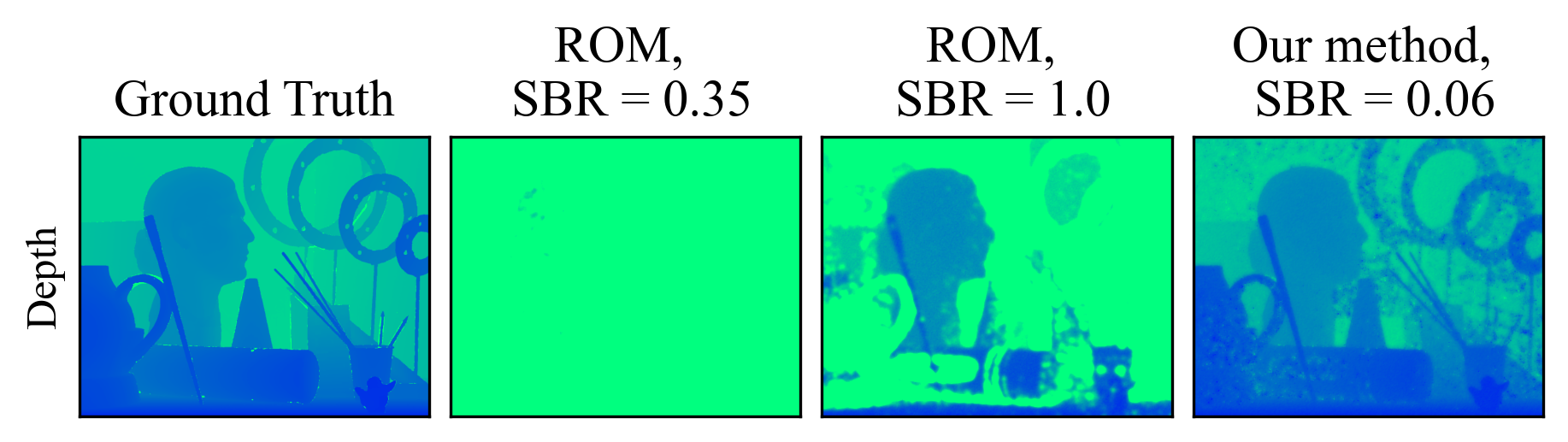
Depth estimation using a single-photon LiDAR is often solved by a matched filter. It is, however, error-prone in the presence of background noise. A commonly used technique to reject background noise is the rank-ordered mean (ROM) filter previously reported by Shin textit{et al.} (2015). ROM rejects noisy photon arrival timestamps by selecting only a small range of them around the median statistics within its local neighborhood. Despite the promising performance of ROM, its theoretical performance limit is unknown. In this paper, we theoretically characterize the ROM performance by showing that ROM fails when the reflectivity drops below a threshold predetermined by the depth and signal-to-background ratio, and its accuracy undergoes a phase transition at the cutoff. Based on our theory, we propose an improved signal extraction technique by selecting tight timestamp clusters. Experimental results show that the proposed algorithm improves depth estimation performance over ROM by 3 orders of magnitude at the same signal intensities, and achieves high image fidelity at noise levels as high as 17 times that of signal.
Read more7/31/2024

0
Resolution Limit of Single-Photon LiDAR
Stanley H. Chan, Hashan K. Weerasooriya, Weijian Zhang, Pamela Abshire, Istvan Gyongy, Robert K. Henderson
Single-photon Light Detection and Ranging (LiDAR) systems are often equipped with an array of detectors for improved spatial resolution and sensing speed. However, given a fixed amount of flux produced by the laser transmitter across the scene, the per-pixel Signal-to-Noise Ratio (SNR) will decrease when more pixels are packed in a unit space. This presents a fundamental trade-off between the spatial resolution of the sensor array and the SNR received at each pixel. Theoretical characterization of this fundamental limit is explored. By deriving the photon arrival statistics and introducing a series of new approximation techniques, the Mean Squared Error (MSE) of the maximum-likelihood estimator of the time delay is derived. The theoretical predictions align well with simulations and real data.
Read more4/3/2024

0
Parametric Modeling and Estimation of Photon Registrations for 3D Imaging
Weijian Zhang, Hashan K. Weerasooriya, Prateek Chennuri, Stanley H. Chan
In single-photon light detection and ranging (SP-LiDAR) systems, the histogram distortion due to hardware dead time fundamentally limits the precision of depth estimation. To compensate for the dead time effects, the photon registration distribution is typically modeled based on the Markov chain self-excitation process. However, this is a discrete process and it is computationally expensive, thus hindering potential neural network applications and fast simulations. In this paper, we overcome the modeling challenge by proposing a continuous parametric model. We introduce a Gaussian-uniform mixture model (GUMM) and periodic padding to address high noise floors and noise slopes respectively. By deriving and implementing a customized expectation maximization (EM) algorithm, we achieve accurate histogram matching in scenarios that were deemed difficult in the literature.
Read more7/4/2024

0
A Radiometric Correction based Optical Modeling Approach to Removing Reflection Noise in TLS Point Clouds of Urban Scenes
Li Fang, Tianyu Li, Yanghong Lin, Shudong Zhou, Wei Yao
Point clouds are vital in computer vision tasks such as 3D reconstruction, autonomous driving, and robotics. However, TLS-acquired point clouds often contain virtual points from reflective surfaces, causing disruptions. This study presents a reflection noise elimination algorithm for TLS point clouds. Our innovative reflection plane detection algorithm, based on geometry-optical models and physical properties, identifies and categorizes reflection points per optical reflection theory. We've adapted the LSFH feature descriptor to retain reflection features, mitigating interference from symmetrical architectural structures. By incorporating the Hausdorff feature distance, the algorithm enhances resilience to ghosting and deformation, improving virtual point detection accuracy. Extensive experiments on the 3DRN benchmark dataset, featuring diverse urban environments with virtual TLS reflection noise, show our algorithm improves precision and recall rates for 3D points in reflective regions by 57.03% and 31.80%, respectively. Our method achieves a 9.17% better outlier detection rate and 5.65% higher accuracy than leading methods. Access the 3DRN dataset at (https://github.com/Tsuiky/3DRN).
Read more7/4/2024