Identity-enabled CDMA LiDAR for massively parallel ranging with a single-element receiver

0
💬
Sign in to get full access
Overview
- LiDAR (Light Detection and Ranging) is a crucial tool for high-resolution 3D imaging in applications like autonomous vehicles, remote sensing, and augmented reality.
- Traditional mechanical scanning methods in LiDAR systems have limitations, prompting the need for faster acquisition speed and higher resolution.
- This study introduces a novel wavelength-multiplexed code-division multiple access (CDMA) parallel laser ranging approach with a single-pixel receiver to address these challenges.
Plain English Explanation
LiDAR is a technology that uses laser light to create detailed 3D maps of the environment. It's used in many applications, such as self-driving cars, drones, and augmented reality. Current LiDAR systems have limitations when it comes to how fast they can capture data and how detailed the 3D images can be.
The researchers in this study developed a new type of LiDAR system that can do many laser measurements at the same time, instead of just one at a time like traditional systems. They use a technique called code-division multiple access (CDMA), which is similar to how multiple cell phones can use the same wireless network without interfering with each other.
This parallel approach allows the LiDAR system to be much more efficient and serve more users at the same time. The researchers also designed the system to use just a single light detector, which simplifies the hardware and makes it less susceptible to interference from the environment or other signals.
The researchers demonstrated their CDMA LiDAR system by creating 3D images of objects at 5 and 10 meters away. They showed that the system can do 40 different laser measurements at the same time, with very precise depth and angle information. This technology could lead to smaller, more powerful LiDAR systems that are well-suited for commercial applications like self-driving cars and augmented reality.
Technical Explanation
The researchers developed a novel wavelength-multiplexed CDMA parallel laser ranging approach with a single-pixel receiver to address the limitations of traditional mechanical scanning LiDAR methods. By leveraging the unique properties of Gold-sequences in a direct-sequence spread spectrum (DSSS) framework, their design enables comprehensive parallelization in detection and ranging activities to significantly enhance system efficiency and user capacity.
The proposed coaxial architecture simplifies the hardware requirements by using a single avalanche photodiode (APD) for multi-reception, reducing susceptibility to ambient noise and external interferences. The researchers demonstrated 3D imaging at 5 m and 10 m, and the experimental results highlight the capability of their CDMA LiDAR system to achieve 40 parallel ranging channels with centimeter-level depth resolution and an angular resolution of 0.03 degree. Furthermore, the system allows for user identification modulation, enabling identity-based ranging among different users.
Critical Analysis
The researchers have presented a promising approach to address the limitations of traditional LiDAR systems, particularly the need for faster acquisition speed and higher resolution. The CDMA parallel laser ranging technique with a single-pixel receiver offers significant improvements in system efficiency and user capacity.
However, the paper does not provide a comprehensive analysis of the potential limitations or caveats of the proposed system. For instance, the impact of environmental factors, such as weather conditions or interference from other signals, on the system's performance is not discussed in detail. Additionally, the scalability of the system to larger operating ranges or more complex environments could be an area for further research.
Furthermore, the researchers should consider the potential trade-offs between the parallelization benefits and any potential increase in power consumption or system complexity. Addressing these aspects could help strengthen the overall assessment of the proposed CDMA LiDAR system.
Conclusion
This study introduces a novel wavelength-multiplexed CDMA parallel laser ranging approach with a single-pixel receiver, which addresses the limitations of traditional mechanical scanning LiDAR systems. The researchers have demonstrated the capability of their system to achieve high-resolution 3D imaging with parallel ranging channels, centimeter-level depth resolution, and user identification modulation.
The robustness of the proposed system against interference and speckle noise, combined with its potential for miniaturization and integration into chip-scale optics, presents a promising avenue for developing high-performance, compact LiDAR systems suitable for a wide range of commercial applications, including autonomous vehicles, remote sensing, and augmented reality.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
0
Identity-enabled CDMA LiDAR for massively parallel ranging with a single-element receiver
Yixiu Shen, Zi Heng Lim, Guangya Zhou
Light detection and ranging (LiDAR) have emerged as a crucial tool for high-resolution 3D imaging, particularly in autonomous vehicles, remote sensing, and augmented reality. However, the increasing demand for faster acquisition speed and higher resolution in LiDAR systems has highlighted the limitations of traditional mechanical scanning methods. This study introduces a novel wavelength-multiplexed code-division multiple access (CDMA) parallel laser ranging approach with a single-pixel receiver to address these challenges. By leveraging the unique properties of Gold-sequences in a direct-sequence spread spectrum (DSSS) framework, our design enables comprehensive parallelization in detection and ranging activities to significantly enhance system efficiency and user capacity. The proposed coaxial architecture simplifies hardware requirements using a single avalanche photodiode (APD) for multi-reception, reducing susceptibility to ambient noise and external interferences. We demonstrate 3D imaging at 5 m and 10 m, and the experimental results highlight the capability of our CDMA LiDAR system to achieve 40 parallel ranging channels with centimeter-level depth resolution and an angular resolution of 0.03 degree. Furthermore, our system allows for user identification modulation, enabling identity-based ranging among different users. The robustness of our proposed system against interference and speckle noise and near-far signal problems, combined with its potential for miniaturization and integration into chip-scale optics, presents a promising avenue to develop high-performance, compact LiDAR systems suitable for commercial applications.
Read more7/11/2024
0
Enabling Visual Recognition at Radio Frequency
Haowen Lai, Gaoxiang Luo, Yifei Liu, Mingmin Zhao
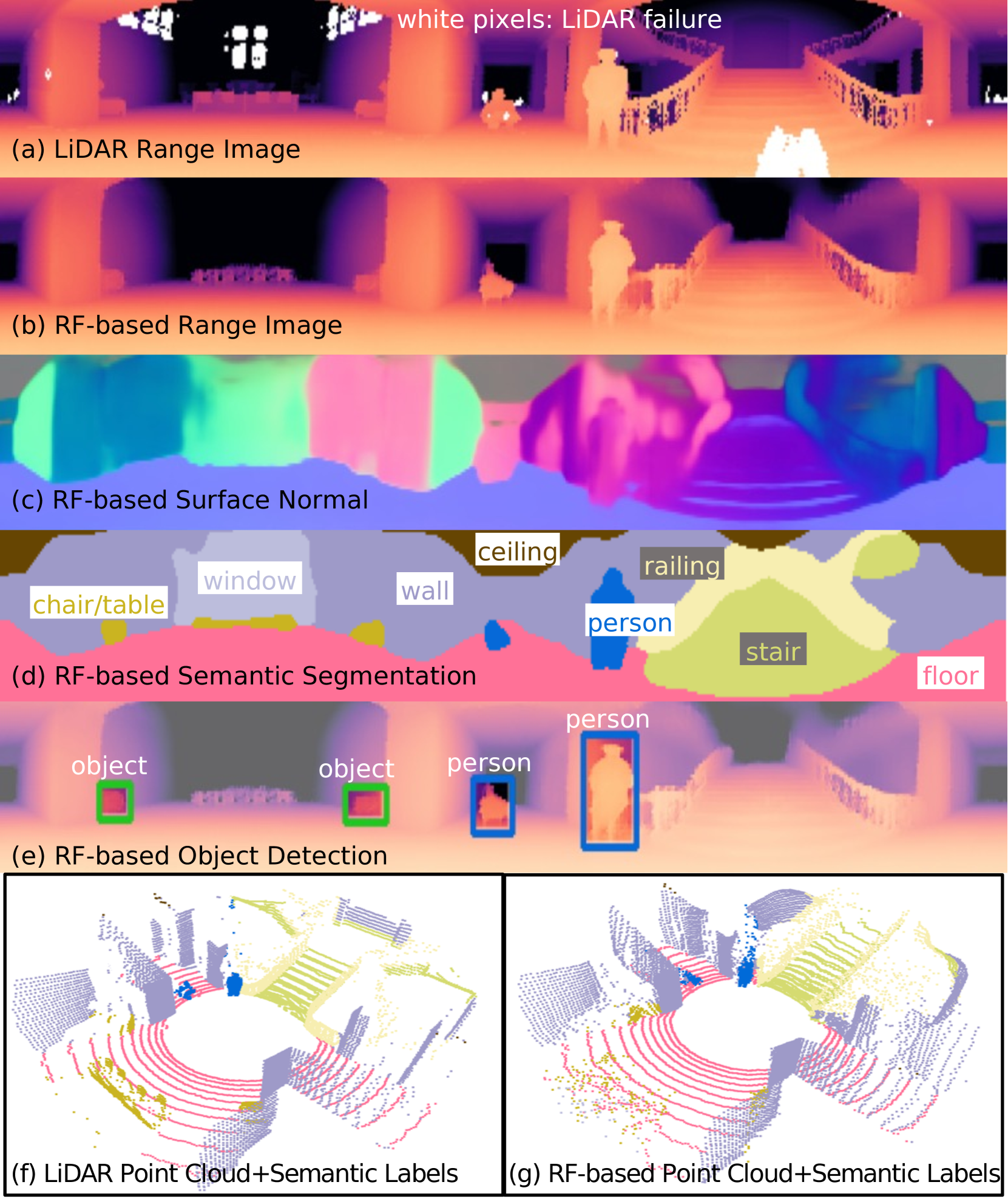
This paper introduces PanoRadar, a novel RF imaging system that brings RF resolution close to that of LiDAR, while providing resilience against conditions challenging for optical signals. Our LiDAR-comparable 3D imaging results enable, for the first time, a variety of visual recognition tasks at radio frequency, including surface normal estimation, semantic segmentation, and object detection. PanoRadar utilizes a rotating single-chip mmWave radar, along with a combination of novel signal processing and machine learning algorithms, to create high-resolution 3D images of the surroundings. Our system accurately estimates robot motion, allowing for coherent imaging through a dense grid of synthetic antennas. It also exploits the high azimuth resolution to enhance elevation resolution using learning-based methods. Furthermore, PanoRadar tackles 3D learning via 2D convolutions and addresses challenges due to the unique characteristics of RF signals. Our results demonstrate PanoRadar's robust performance across 12 buildings.
Read more5/31/2024
0
RangeLDM: Fast Realistic LiDAR Point Cloud Generation
Qianjiang Hu, Zhimin Zhang, Wei Hu
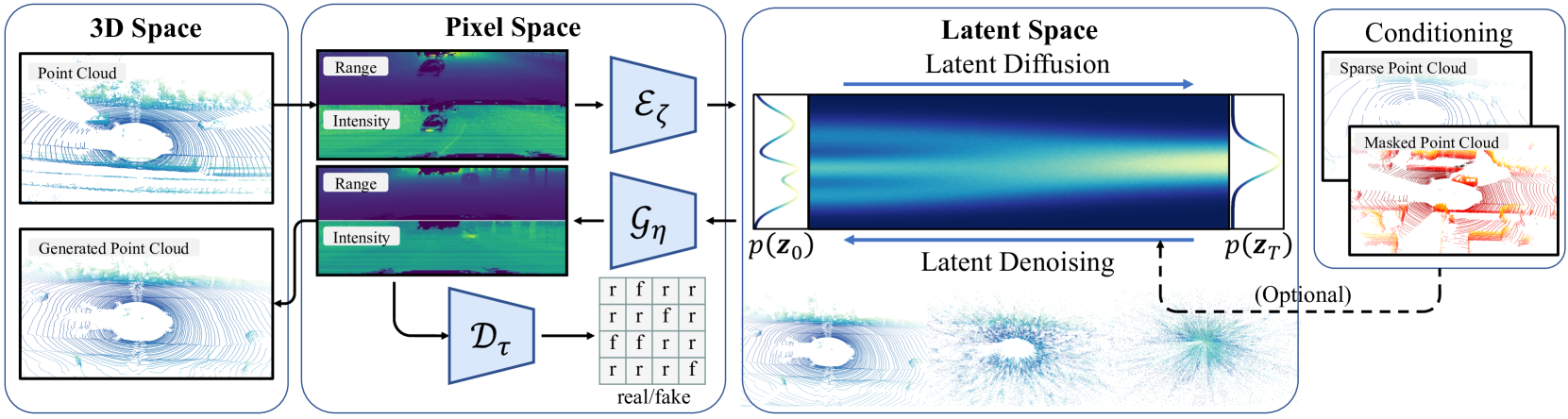
Autonomous driving demands high-quality LiDAR data, yet the cost of physical LiDAR sensors presents a significant scaling-up challenge. While recent efforts have explored deep generative models to address this issue, they often consume substantial computational resources with slow generation speeds while suffering from a lack of realism. To address these limitations, we introduce RangeLDM, a novel approach for rapidly generating high-quality range-view LiDAR point clouds via latent diffusion models. We achieve this by correcting range-view data distribution for accurate projection from point clouds to range images via Hough voting, which has a critical impact on generative learning. We then compress the range images into a latent space with a variational autoencoder, and leverage a diffusion model to enhance expressivity. Additionally, we instruct the model to preserve 3D structural fidelity by devising a range-guided discriminator. Experimental results on KITTI-360 and nuScenes datasets demonstrate both the robust expressiveness and fast speed of our LiDAR point cloud generation.
Read more9/11/2024

0
Resolution Limit of Single-Photon LiDAR
Stanley H. Chan, Hashan K. Weerasooriya, Weijian Zhang, Pamela Abshire, Istvan Gyongy, Robert K. Henderson
Single-photon Light Detection and Ranging (LiDAR) systems are often equipped with an array of detectors for improved spatial resolution and sensing speed. However, given a fixed amount of flux produced by the laser transmitter across the scene, the per-pixel Signal-to-Noise Ratio (SNR) will decrease when more pixels are packed in a unit space. This presents a fundamental trade-off between the spatial resolution of the sensor array and the SNR received at each pixel. Theoretical characterization of this fundamental limit is explored. By deriving the photon arrival statistics and introducing a series of new approximation techniques, the Mean Squared Error (MSE) of the maximum-likelihood estimator of the time delay is derived. The theoretical predictions align well with simulations and real data.
Read more4/3/2024