REvolve: Reward Evolution with Large Language Models for Autonomous Driving

0

Sign in to get full access
Overview
- This paper introduces a new approach called REvolve (Reward Evolution with Large Language Models) for autonomous driving systems.
- REvolve uses large language models to evolve the reward function for reinforcement learning, allowing the system to learn complex driving behaviors.
- The paper demonstrates the effectiveness of REvolve on challenging autonomous driving tasks, outperforming existing techniques.
Plain English Explanation
The paper proposes a new way to train autonomous driving systems using a technique called REvolve. Traditional reinforcement learning approaches use a predefined reward function to guide the system towards desired behaviors. However, designing an effective reward function can be very challenging, especially for complex tasks like autonomous driving.
REvolve addresses this issue by using large language models to automatically evolve the reward function during the training process. These language models can capture high-level concepts and goals, allowing the system to learn more nuanced and adaptive driving behaviors.
The key insight is that the language model can provide a richer and more flexible reward signal than a manually crafted function. As the system trains, the reward function is continuously updated to better align with the system's performance and the desired driving behaviors.
This approach has several advantages over traditional techniques. It can lead to more robust and capable autonomous driving systems that are better able to handle a wide range of driving scenarios. Additionally, the use of large language models allows the system to learn complex skills and behaviors from high-level instructions or goals.
Technical Explanation
The paper formalizes the autonomous driving problem as a reinforcement learning task, where the agent (the autonomous vehicle) must learn to navigate the environment and reach its destination while obeying traffic rules and avoiding collisions.
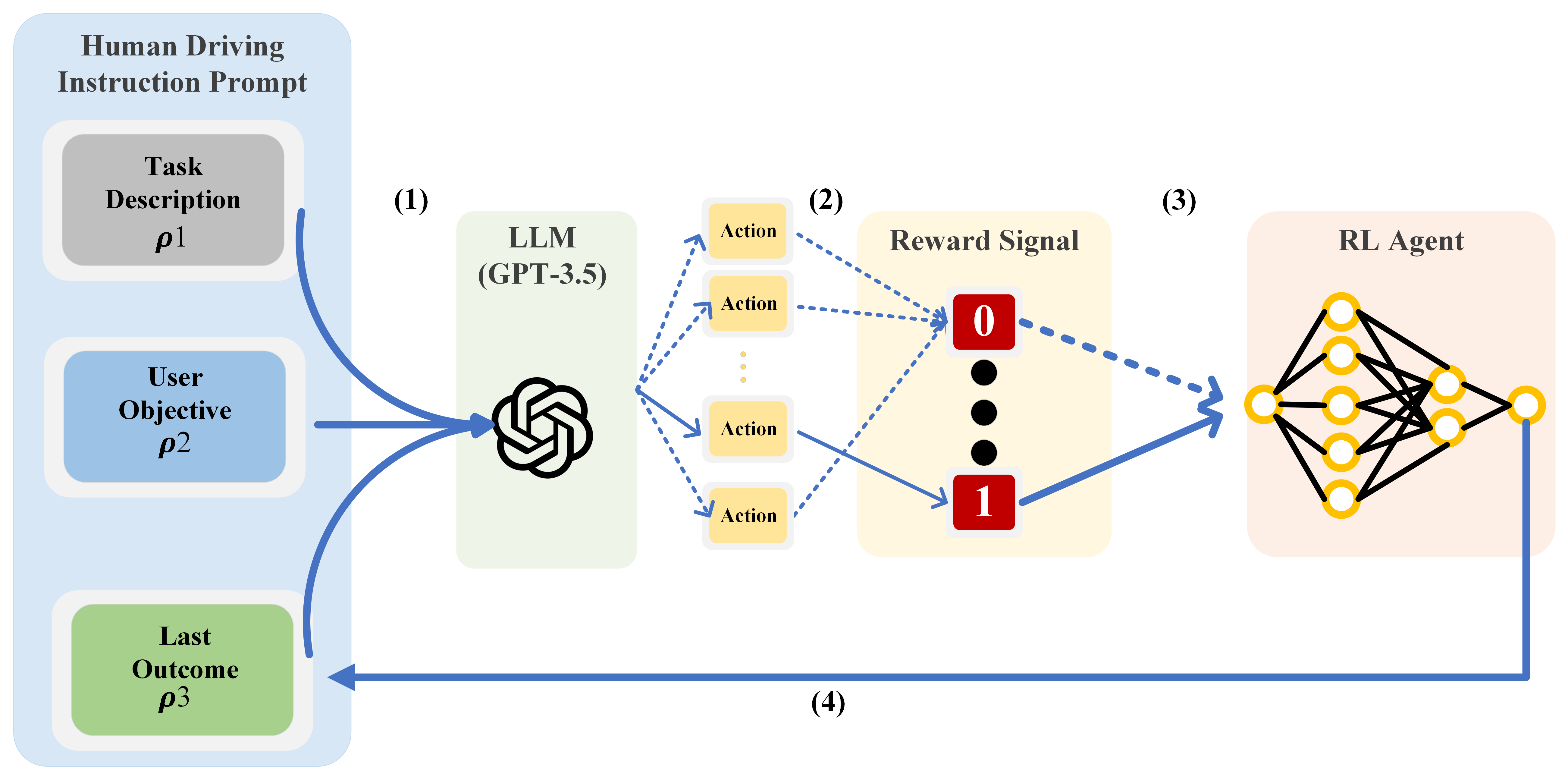
The key innovation of REvolve is the use of large language models to automatically evolve the reward function during the training process. Specifically, the authors use a pre-trained language model to generate a reward signal based on the current state of the environment and the agent's actions.
This reward signal is then used to update the agent's policy through standard reinforcement learning algorithms, such as proximal policy optimization (PPO). As the training progresses, the language model is fine-tuned to better align the reward signal with the desired driving behaviors, effectively "evolving" the reward function.
The authors demonstrate the effectiveness of REvolve on several challenging autonomous driving tasks, including urban driving, highway driving, and navigating through intersections. The results show that REvolve outperforms traditional reinforcement learning approaches, as well as other techniques that use language models for reward shaping.
Critical Analysis
The paper presents a novel and promising approach to autonomous driving using large language models. The use of an evolving reward function is a clever way to address the challenge of designing effective reward functions for complex tasks.
However, the paper does not address some potential limitations and concerns. For example, it is unclear how the language model's biases or limitations might affect the learned driving behaviors, and how the system would perform in rare or unexpected situations.
Additionally, the computational and sample efficiency of the REvolve approach is not thoroughly explored. While language models can provide a richer signal, they may also introduce additional computational overhead and training complexity.
Further research is needed to fully understand the tradeoffs and potential issues with this approach, as well as explore ways to improve its efficiency and robustness. Nevertheless, the core idea of using language models to evolve reward functions is a significant contribution to the field of autonomous driving and reinforcement learning.
Conclusion
The REvolve paper presents a novel approach to autonomous driving that uses large language models to evolve the reward function during reinforcement learning. This allows the system to learn more complex and adaptive driving behaviors, outperforming traditional techniques.
While the paper demonstrates the potential of this approach, it also highlights the need for further research to address its limitations and optimize its performance. As autonomous driving systems become more advanced, techniques like REvolve that can capture high-level concepts and goals will be increasingly important for developing robust and capable systems.
Overall, this paper represents an important step forward in the field of autonomous driving and reinforcement learning, and its ideas could have broader implications for other complex decision-making tasks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
REvolve: Reward Evolution with Large Language Models for Autonomous Driving
Rishi Hazra, Alkis Sygkounas, Andreas Persson, Amy Loutfi, Pedro Zuidberg Dos Martires
Designing effective reward functions is crucial to training reinforcement learning (RL) algorithms. However, this design is non-trivial, even for domain experts, due to the subjective nature of certain tasks that are hard to quantify explicitly. In recent works, large language models (LLMs) have been used for reward generation from natural language task descriptions, leveraging their extensive instruction tuning and commonsense understanding of human behavior. In this work, we hypothesize that LLMs, guided by human feedback, can be used to formulate human-aligned reward functions. Specifically, we study this in the challenging setting of autonomous driving (AD), wherein notions of good driving are tacit and hard to quantify. To this end, we introduce REvolve, an evolutionary framework that uses LLMs for reward design in AD. REvolve creates and refines reward functions by utilizing human feedback to guide the evolution process, effectively translating implicit human knowledge into explicit reward functions for training (deep) RL agents. We demonstrate that agents trained on REvolve-designed rewards align closely with human driving standards, thereby outperforming other state-of-the-art baselines.
Read more6/4/2024

0
Generating and Evolving Reward Functions for Highway Driving with Large Language Models
Xu Han, Qiannan Yang, Xianda Chen, Xiaowen Chu, Meixin Zhu
Reinforcement Learning (RL) plays a crucial role in advancing autonomous driving technologies by maximizing reward functions to achieve the optimal policy. However, crafting these reward functions has been a complex, manual process in many practices. To reduce this complexity, we introduce a novel framework that integrates Large Language Models (LLMs) with RL to improve reward function design in autonomous driving. This framework utilizes the coding capabilities of LLMs, proven in other areas, to generate and evolve reward functions for highway scenarios. The framework starts with instructing LLMs to create an initial reward function code based on the driving environment and task descriptions. This code is then refined through iterative cycles involving RL training and LLMs' reflection, which benefits from their ability to review and improve the output. We have also developed a specific prompt template to improve LLMs' understanding of complex driving simulations, ensuring the generation of effective and error-free code. Our experiments in a highway driving simulator across three traffic configurations show that our method surpasses expert handcrafted reward functions, achieving a 22% higher average success rate. This not only indicates safer driving but also suggests significant gains in development productivity.
Read more6/18/2024
0
In-context Learning for Automated Driving Scenarios
Ziqi Zhou, Jingyue Zhang, Jingyuan Zhang, Boyue Wang, Tianyu Shi, Alaa Khamis
One of the key challenges in current Reinforcement Learning (RL)-based Automated Driving (AD) agents is achieving flexible, precise, and human-like behavior cost-effectively. This paper introduces an innovative approach utilizing Large Language Models (LLMs) to intuitively and effectively optimize RL reward functions in a human-centric way. We developed a framework where instructions and dynamic environment descriptions are input into the LLM. The LLM then utilizes this information to assist in generating rewards, thereby steering the behavior of RL agents towards patterns that more closely resemble human driving. The experimental results demonstrate that this approach not only makes RL agents more anthropomorphic but also reaches better performance. Additionally, various strategies for reward-proxy and reward-shaping are investigated, revealing the significant impact of prompt design on shaping an AD vehicle's behavior. These findings offer a promising direction for the development of more advanced and human-like automated driving systems. Our experimental data and source code can be found here.
Read more5/8/2024
💬
0
Learning Reward for Robot Skills Using Large Language Models via Self-Alignment
Yuwei Zeng, Yao Mu, Lin Shao
Learning reward functions remains the bottleneck to equip a robot with a broad repertoire of skills. Large Language Models (LLM) contain valuable task-related knowledge that can potentially aid in the learning of reward functions. However, the proposed reward function can be imprecise, thus ineffective which requires to be further grounded with environment information. We proposed a method to learn rewards more efficiently in the absence of humans. Our approach consists of two components: We first use the LLM to propose features and parameterization of the reward, then update the parameters through an iterative self-alignment process. In particular, the process minimizes the ranking inconsistency between the LLM and the learnt reward functions based on the execution feedback. The method was validated on 9 tasks across 2 simulation environments. It demonstrates a consistent improvement over training efficacy and efficiency, meanwhile consuming significantly fewer GPT tokens compared to the alternative mutation-based method.
Read more5/17/2024