Risk-anticipatory autonomous driving strategies considering vehicles' weights, based on hierarchical deep reinforcement learning
2401.08661
0
0
🤿
Abstract
Autonomous vehicles (AVs) have the potential to prevent accidents caused by drivers errors and reduce road traffic risks. Due to the nature of heavy vehicles, whose collisions cause more serious crashes, the weights of vehicles need to be considered when making driving strategies aimed at reducing the potential risks and their consequences in the context of autonomous driving. This study develops an autonomous driving strategy based on risk anticipation, considering the weights of surrounding vehicles and using hierarchical deep reinforcement learning. A risk indicator integrating surrounding vehicles weights, based on the risk field theory, is proposed and incorporated into autonomous driving decisions. A hybrid action space is designed to allow for left lane changes, right lane changes and car-following, which enables AVs to act more freely and realistically whenever possible. To solve the above hybrid decision-making problem, a hierarchical proximal policy optimization (HPPO) algorithm with an attention mechanism (AT-HPPO) is developed, providing great advantages in maintaining stable performance with high robustness and generalization. An indicator, potential collision energy in conflicts (PCEC), is newly proposed to evaluate the performance of the developed AV driving strategy from the perspective of the consequences of potential accidents. The performance evaluation results in simulation and dataset demonstrate that our model provides driving strategies that reduce both the likelihood and consequences of potential accidents, at the same time maintaining driving efficiency. The developed method is especially meaningful for AVs driving on highways, where heavy vehicles make up a high proportion of the traffic.
Create account to get full access
Overview
- The paper explores an autonomous driving strategy that considers the weights of surrounding vehicles to reduce the potential risks and consequences of accidents.
- The strategy uses risk anticipation and hierarchical deep reinforcement learning to make driving decisions.
- The proposed approach includes a risk indicator based on the risk field theory and a hybrid action space for left/right lane changes and car-following.
- The authors develop a hierarchical proximal policy optimization (HPPO) algorithm with an attention mechanism to solve the hybrid decision-making problem.
- A new performance indicator, potential collision energy in conflicts (PCEC), is introduced to evaluate the driving strategy's ability to reduce the consequences of potential accidents.
Plain English Explanation
Autonomous vehicles (AVs) have the potential to prevent many accidents caused by human error and reduce the risks on the road. However, when it comes to heavier vehicles like trucks, the collisions they're involved in can be more serious. This study developed an autonomous driving strategy that takes into account the weights of surrounding vehicles to try and lower the potential risks and consequences of accidents.
The strategy uses a "risk anticipation" approach, which means it tries to predict and prepare for potential hazards. It incorporates a "risk indicator" that considers the weights of nearby vehicles, based on a concept called "risk field theory." This helps the AV make better decisions about when to change lanes or follow other cars.
The researchers also designed a "hybrid action space" that allows the AV to perform left lane changes, right lane changes, and car-following maneuvers. This gives the AV more flexibility to navigate different situations as safely and efficiently as possible.
To determine the best actions for the AV, the researchers developed a hierarchical deep reinforcement learning algorithm with an "attention mechanism." This allows the AV to focus on the most relevant information when making decisions.
The researchers also proposed a new way to evaluate the performance of the driving strategy, called "potential collision energy in conflicts" (PCEC). This looks at not just the likelihood of an accident, but also the potential severity of the consequences if one were to occur.
Overall, this research aims to make autonomous vehicles safer, especially when they're sharing the road with heavier vehicles like trucks. The strategy could be particularly useful for AVs driving on highways, where large commercial vehicles make up a significant portion of the traffic.
Technical Explanation
The paper presents an autonomous driving strategy that considers the weights of surrounding vehicles to reduce the potential risks and consequences of accidents. The proposed approach uses risk anticipation and hierarchical deep reinforcement learning to make driving decisions.
A risk indicator is developed based on the risk field theory, which incorporates the weights of nearby vehicles. This risk indicator is then used in the autonomous driving decision-making process. The authors also design a hybrid action space that allows for left lane changes, right lane changes, and car-following maneuvers, enabling the autonomous vehicle (AV) to act more flexibly and realistically.
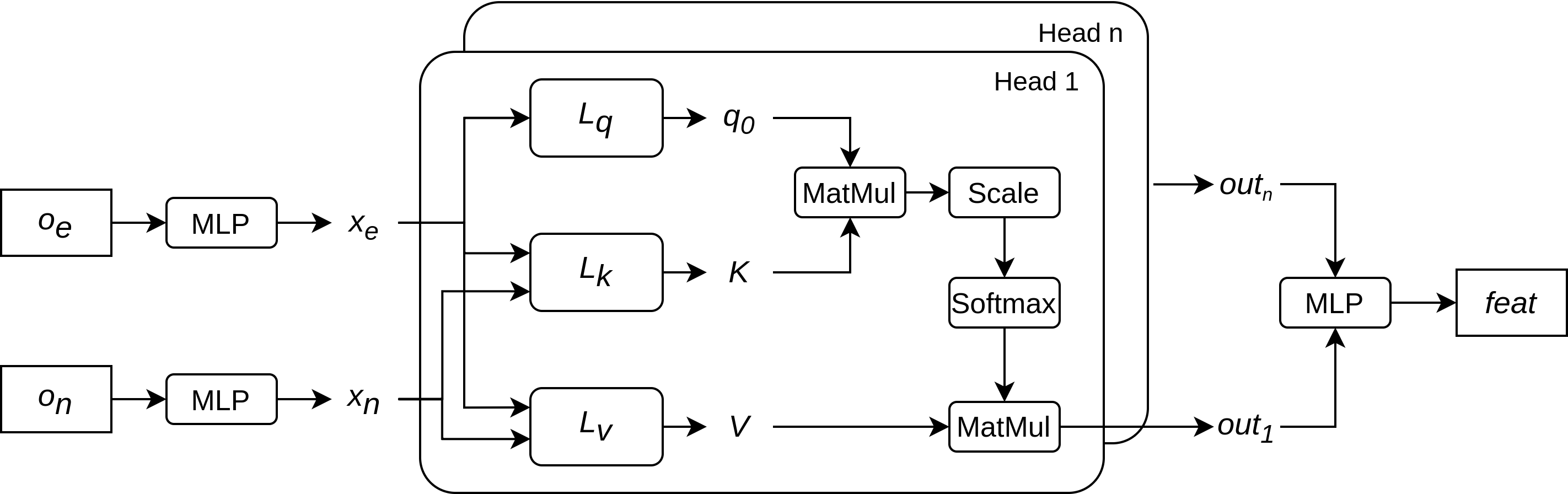
To solve the hybrid decision-making problem, the researchers develop a hierarchical proximal policy optimization (HPPO) algorithm with an attention mechanism (AT-HPPO). This approach provides advantages in maintaining stable performance, high robustness, and good generalization.
Additionally, the authors propose a new performance indicator called "potential collision energy in conflicts" (PCEC) to evaluate the driving strategy's ability to reduce the consequences of potential accidents, not just the likelihood of accidents.
The performance evaluation, conducted through simulation and dataset, demonstrates that the proposed driving strategy can reduce both the likelihood and consequences of potential accidents while maintaining driving efficiency. The method is particularly relevant for AVs operating on highways, where heavy vehicles make up a significant portion of the traffic.
Critical Analysis
The paper presents a comprehensive approach to autonomous driving that considers the weights of surrounding vehicles to improve safety. The use of risk anticipation and hierarchical deep reinforcement learning is a promising direction, and the inclusion of a hybrid action space allows for more realistic and flexible decision-making.
However, the paper does not provide details on the training process or the specific architectures used for the HPPO algorithm with attention mechanism. Additionally, while the PCEC performance indicator is a valuable addition, the paper could have provided more information on its calculation and how it compares to other safety metrics.
Furthermore, the paper does not address the potential challenges of deploying such a system in the real world, such as the availability and reliability of vehicle weight information, the integration with existing traffic management systems, or the ethical considerations around prioritizing the safety of heavy vehicles over lighter ones.
Future research could explore ways to make the system more robust to incomplete or uncertain data, as well as investigate the long-term effects of this driving strategy on traffic flow and overall transportation system efficiency.
Conclusion
This paper presents an innovative autonomous driving strategy that takes into account the weights of surrounding vehicles to improve safety and reduce the potential consequences of accidents. The use of risk anticipation, hierarchical deep reinforcement learning, and a hybrid action space, coupled with the HPPO algorithm with attention mechanism, demonstrates the potential of this approach to enhance the safety and efficiency of autonomous vehicles, especially on highways with a high proportion of heavy vehicles.
The introduction of the PCEC performance indicator is a valuable contribution, as it shifts the focus from just accident likelihood to the potential consequences of collisions. This holistic view can help guide the development of safer and more responsible autonomous driving systems.
While the paper raises some important considerations for real-world deployment, the overall approach represents a significant step forward in making autonomous vehicles more adaptable to the diverse mix of vehicles on the road, ultimately leading to safer and more reliable transportation for all.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Demystifying the Physics of Deep Reinforcement Learning-Based Autonomous Vehicle Decision-Making
Hanxi Wan, Pei Li, Arpan Kusari
0
0
With the advent of universal function approximators in the domain of reinforcement learning, the number of practical applications leveraging deep reinforcement learning (DRL) has exploded. Decision-making in autonomous vehicles (AVs) has emerged as a chief application among them, taking the sensor data or the higher-order kinematic variables as the input and providing a discrete choice or continuous control output. There has been a continuous effort to understand the black-box nature of the DRL models, but so far, there hasn't been any discussion (to the best of authors' knowledge) about how the models learn the physical process. This presents an overwhelming limitation that restricts the real-world deployment of DRL in AVs. Therefore, in this research work, we try to decode the knowledge learnt by the attention-based DRL framework about the physical process. We use a continuous proximal policy optimization-based DRL algorithm as the baseline model and add a multi-head attention framework in an open-source AV simulation environment. We provide some analytical techniques for discussing the interpretability of the trained models in terms of explainability and causality for spatial and temporal correlations. We show that the weights in the first head encode the positions of the neighboring vehicles while the second head focuses on the leader vehicle exclusively. Also, the ego vehicle's action is causally dependent on the vehicles in the target lane spatially and temporally. Through these findings, we reliably show that these techniques can help practitioners decipher the results of the DRL algorithms.
6/14/2024

Human-Machine Interaction in Automated Vehicles: Reducing Voluntary Driver Intervention
Xinzhi Zhong, Yang Zhou, Varshini Kamaraj, Zhenhao Zhou, Wissam Kontar, Dan Negrut, John D. Lee, Soyoung Ahn
0
0
This paper develops a novel car-following control method to reduce voluntary driver interventions and improve traffic stability in Automated Vehicles (AVs). Through a combination of experimental and empirical analysis, we show how voluntary driver interventions can instigate substantial traffic disturbances that are amplified along the traffic upstream. Motivated by these findings, we present a framework for driver intervention based on evidence accumulation (EA), which describes the evolution of the driver's distrust in automation, ultimately resulting in intervention. Informed through the EA framework, we propose a deep reinforcement learning (DRL)-based car-following control for AVs that is strategically designed to mitigate unnecessary driver intervention and improve traffic stability. Numerical experiments are conducted to demonstrate the effectiveness of the proposed control model.
4/10/2024
↗️
Comprehensive Autonomous Vehicle Optimal Routing With Dynamic Heuristics
Ragav V, Jesher Joshua M, Syed Ibrahim S P
0
0
Auto manufacturers and research groups are working on autonomous driving for long period and achieved significant progress. Autonomous vehicles (AV) are expected to transform road traffic reduction from current conditions, avoiding accidents and congestion. As the implementation of an autonomous vehicle ecosystem includes complex automotive technology, ethics, passenger behaviour, traffic management policies and liability etc., the maturity of AV solutions are still evolving. The proposed model to improve AV user experience, uses a hybrid AV Network of multiple connected autonomous vehicles which communicate with each other in an environment shared by human driven vehicles. The proposed Optimal AV Network (OAVN) solution provides better coordination and optimization of autonomous vehicles, improved Transportation efficiency, improved passenger comfort and safety, real-time dynamic adaption of traffic & road conditions along with improved in-cabin assistance with inputs from various sensors. The true optimal solution for this problem, is to devise an automated guidance system for vehicles in an AV network, to reach destinations in best possible routes along with passenger comfort and safety. A custom informed search model is proposed along with other heuristic goals for better user experience. The results are analysed and compared to evaluate the effectiveness of the solution and identify gaps and future enhancements.
5/28/2024
Deep Reinforcement Learning for Advanced Longitudinal Control and Collision Avoidance in High-Risk Driving Scenarios
Dianwei Chen, Yaobang Gong, Xianfeng Yang
0
0
Existing Advanced Driver Assistance Systems primarily focus on the vehicle directly ahead, often overlooking potential risks from following vehicles. This oversight can lead to ineffective handling of high risk situations, such as high speed, closely spaced, multi vehicle scenarios where emergency braking by one vehicle might trigger a pile up collision. To overcome these limitations, this study introduces a novel deep reinforcement learning based algorithm for longitudinal control and collision avoidance. This proposed algorithm effectively considers the behavior of both leading and following vehicles. Its implementation in simulated high risk scenarios, which involve emergency braking in dense traffic where traditional systems typically fail, has demonstrated the algorithm ability to prevent potential pile up collisions, including those involving heavy duty vehicles.
5/1/2024