Risk-aware Meta-level Decision Making for Exploration Under Uncertainty

0
🏷️
Sign in to get full access
Overview
- Robotic exploration of unknown environments is a complex problem involving decision-making under uncertainty
- Autonomous robots must navigate obstacles and hazardous terrain while effectively exploring large-scale environments
- This paper proposes a risk-aware meta-level decision-making framework to balance local and global exploration strategies
Plain English Explanation
The paper describes a system for robotic exploration of unfamiliar environments. Robots operating in these settings face a lot of uncertainty - their sensors may be unreliable, it's hard to know exactly where they are, and they can't perfectly predict the outcomes of their actions. To deal with this, the researchers developed a framework that helps the robot decide whether to focus on local, detailed exploration or take a broader, global view.
The key idea is that the robot uses information about the environment, the risks of different areas, and its own physical constraints to determine the best exploration strategy at any given time. By switching between local and global policies, the robot can efficiently cover large areas while accounting for the potential dangers. This helps the robot maximize the reward (i.e., useful information gained) while minimizing the risks.
The researchers tested this approach in simulation and with real-world hardware, showing that it allows robots to explore large environments more effectively than previous methods. By balancing local and global exploration, the robot can navigate complex, uncertain environments more safely and efficiently.
Technical Explanation
The paper presents a risk-aware meta-level decision-making framework for robotic exploration of unknown environments. The key innovation is the use of a hierarchical decision-making process that dynamically switches between local and global exploration policies based on the current state of the environment and the robot's capabilities.
The framework builds upon classical coverage path planning approaches by reasoning about the probability of successful policy execution. It uses information about the environment history, traversability risk, and the robot's kinodynamic constraints to determine whether a local or global policy is more likely to maximize reward in the stochastic environment.
The authors validate their approach through both simulation studies and real-world hardware tests on a variety of large-scale exploration scenarios. The results demonstrate that by balancing local and global exploration strategies, the robot can more efficiently cover large-scale environments compared to previous methods.
Critical Analysis
The paper presents a compelling approach to the challenge of robotic exploration under uncertainty. The proposed meta-level decision-making framework seems well-designed to handle the complex tradeoffs involved, leveraging information about the environment, risks, and the robot's own capabilities.
One potential limitation is the reliance on accurate models of the robot's kinodynamic constraints and the environment's traversability. In highly unstructured or dynamic environments, these models may be difficult to obtain or maintain. The authors acknowledge this issue and suggest further research into adaptive techniques for updating these models during exploration.
Another area for improvement could be the integration of multi-robot coordination strategies. By having multiple robots collaborate, the exploration process could potentially be made even more efficient and robust to individual robot failures.
Overall, the paper makes a valuable contribution to the field of autonomous robotic exploration, demonstrating a practical and effective approach to navigating large-scale, uncertain environments. The emphasis on balancing local and global strategies is a compelling concept that could inspire further research and development in this area.
Conclusion
This paper presents a novel risk-aware meta-level decision-making framework for robotic exploration of unknown environments. By dynamically switching between local and global exploration policies based on the current state of the environment and the robot's capabilities, the system is able to efficiently cover large-scale areas while accounting for potential dangers and uncertainties.
The researchers' validation of the approach through both simulation and real-world hardware tests demonstrates the practical viability of this technique. While there are some potential limitations, such as the reliance on accurate environmental models, the overall framework represents a significant advancement in the field of autonomous robotic exploration.
The insights and strategies outlined in this paper could have wide-ranging applications, from search and rescue operations to scientific exploration of remote or hazardous environments. As robotics continues to evolve, frameworks like this that can navigate complex, uncertain situations will become increasingly important for unlocking the full potential of these autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏷️
0
Risk-aware Meta-level Decision Making for Exploration Under Uncertainty
Joshua Ott, Sung-Kyun Kim, Amanda Bouman, Oriana Peltzer, Mamoru Sobue, Harrison Delecki, Mykel J. Kochenderfer, Joel Burdick, Ali-akbar Agha-mohammadi
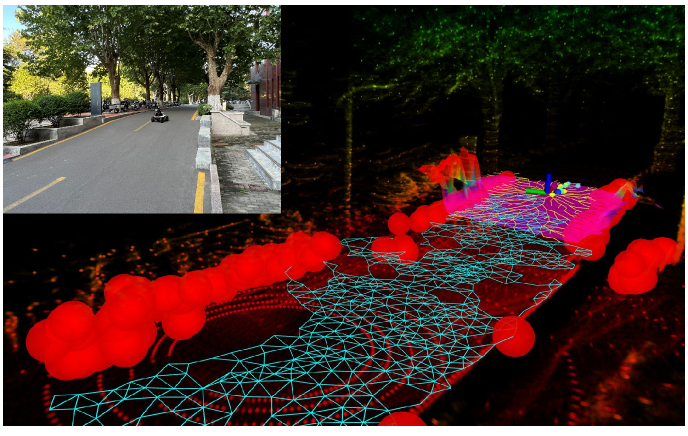
Robotic exploration of unknown environments is fundamentally a problem of decision making under uncertainty where the robot must account for uncertainty in sensor measurements, localization, action execution, as well as many other factors. For large-scale exploration applications, autonomous systems must overcome the challenges of sequentially deciding which areas of the environment are valuable to explore while safely evaluating the risks associated with obstacles and hazardous terrain. In this work, we propose a risk-aware meta-level decision making framework to balance the tradeoffs associated with local and global exploration. Meta-level decision making builds upon classical hierarchical coverage planners by switching between local and global policies with the overall objective of selecting the policy that is most likely to maximize reward in a stochastic environment. We use information about the environment history, traversability risk, and kinodynamic constraints to reason about the probability of successful policy execution to switch between local and global policies. We have validated our solution in both simulation and on a variety of large-scale real world hardware tests. Our results show that by balancing local and global exploration we are able to significantly explore large-scale environments more efficiently.
Read more5/1/2024
0
History-Aware Planning for Risk-free Autonomous Navigation on Unknown Uneven Terrain
Yinchuan Wang, Nianfei Du, Yongsen Qin, Xiang Zhang, Rui Song, Chaoqun Wang
It is challenging for the mobile robot to achieve autonomous and mapless navigation in the unknown environment with uneven terrain. In this study, we present a layered and systematic pipeline. At the local level, we maintain a tree structure that is dynamically extended with the navigation. This structure unifies the planning with the terrain identification. Besides, it contributes to explicitly identifying the hazardous areas on uneven terrain. In particular, certain nodes of the tree are consistently kept to form a sparse graph at the global level, which records the history of the exploration. A series of subgoals that can be obtained in the tree and the graph are utilized for leading the navigation. To determine a subgoal, we develop an evaluation method whose input elements can be efficiently obtained on the layered structure. We conduct both simulation and real-world experiments to evaluate the developed method and its key modules. The experimental results demonstrate the effectiveness and efficiency of our method. The robot can travel through the unknown uneven region safely and reach the target rapidly without a preconstructed map.
Read more6/5/2024
0
Real-World Deployment of a Hierarchical Uncertainty-Aware Collaborative Multiagent Planning System
Martina Stadler Kurtz, Samuel Prentice, Yasmin Veys, Long Quang, Carlos Nieto-Granda, Michael Novitzky, Ethan Stump, Nicholas Roy
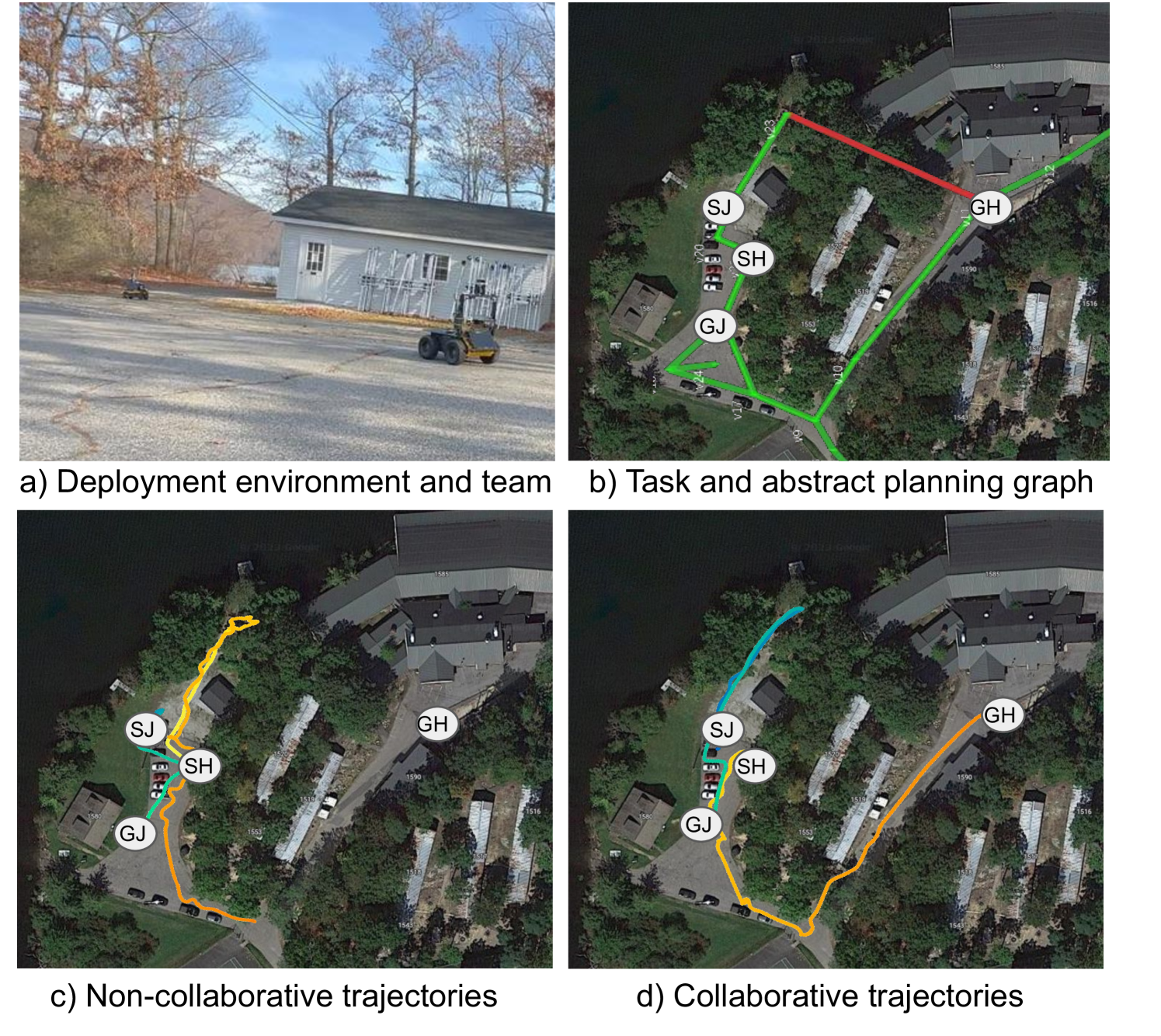
We would like to enable a collaborative multiagent team to navigate at long length scales and under uncertainty in real-world environments. In practice, planning complexity scales with the number of agents in the team, with the length scale of the environment, and with environmental uncertainty. Enabling tractable planning requires developing abstract models that can represent complex, high-quality plans. However, such models often abstract away information needed to generate directly-executable plans for real-world agents in real-world environments, as planning in such detail, especially in the presence of real-world uncertainty, would be computationally intractable. In this paper, we describe the deployment of a planning system that used a hierarchy of planners to execute collaborative multiagent navigation tasks in real-world, unknown environments. By developing a planning system that was robust to failures at every level of the planning hierarchy, we enabled the team to complete collaborative navigation tasks, even in the presence of imperfect planning abstractions and real-world uncertainty. We deployed our approach on a Clearpath Husky-Jackal team navigating in a structured outdoor environment, and demonstrated that the system enabled the agents to successfully execute collaborative plans.
Read more4/29/2024
🔍
0
Risk-Aware Robotics: Tail Risk Measures in Planning, Control, and Verification
Prithvi Akella, Anushri Dixit, Mohamadreza Ahmadi, Lars Lindemann, Margaret P. Chapman, George J. Pappas, Aaron D. Ames, Joel W. Burdick
The need for a systematic approach to risk assessment has increased in recent years due to the ubiquity of autonomous systems that alter our day-to-day experiences and their need for safety, e.g., for self-driving vehicles, mobile service robots, and bipedal robots. These systems are expected to function safely in unpredictable environments and interact seamlessly with humans, whose behavior is notably challenging to forecast. We present a survey of risk-aware methodologies for autonomous systems. We adopt a contemporary risk-aware approach to mitigate rare and detrimental outcomes by advocating the use of tail risk measures, a concept borrowed from financial literature. This survey will introduce these measures and explain their relevance in the context of robotic systems for planning, control, and verification applications.
Read more9/10/2024