Real-World Deployment of a Hierarchical Uncertainty-Aware Collaborative Multiagent Planning System
2404.17438
0
0
Abstract
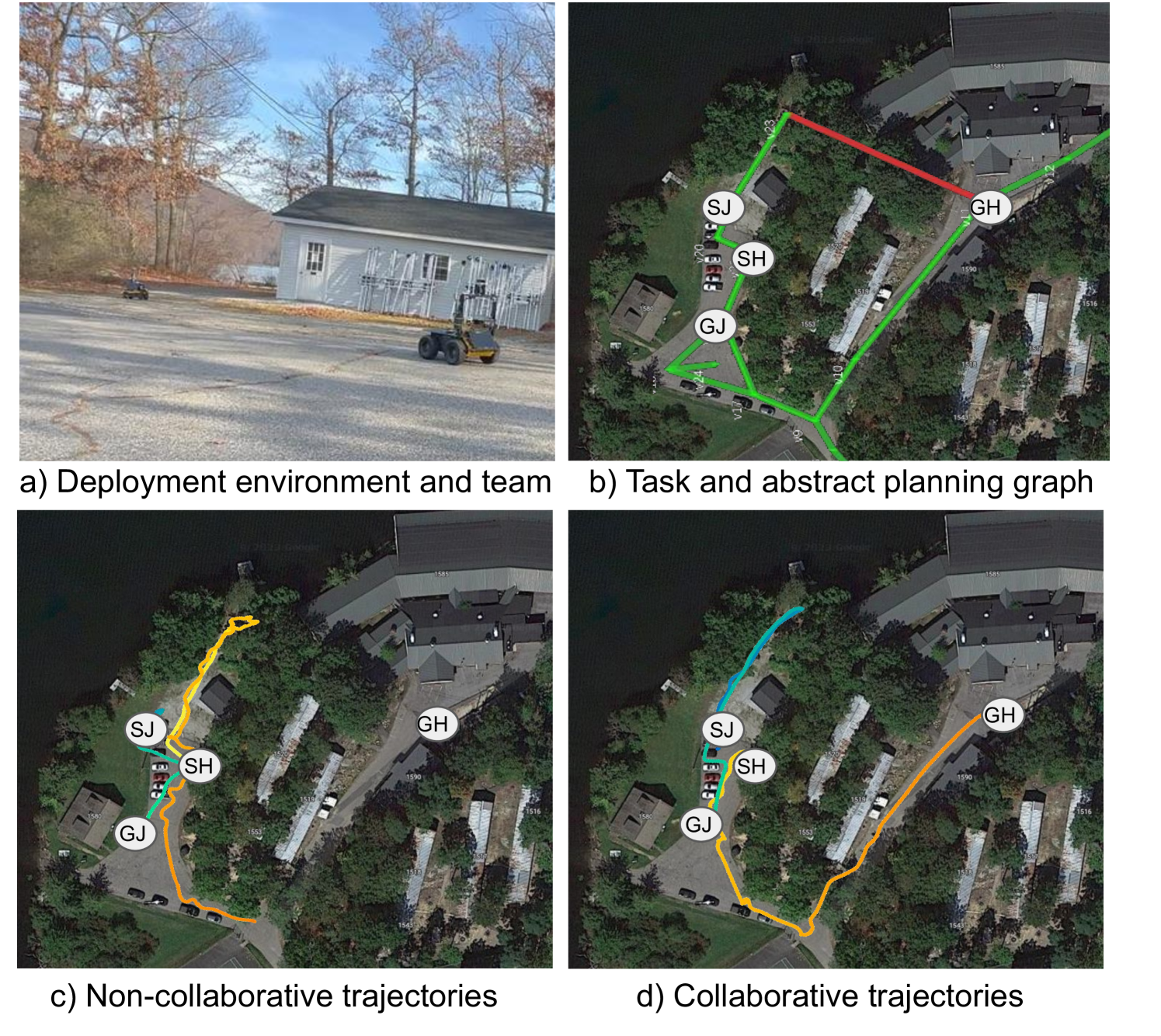
We would like to enable a collaborative multiagent team to navigate at long length scales and under uncertainty in real-world environments. In practice, planning complexity scales with the number of agents in the team, with the length scale of the environment, and with environmental uncertainty. Enabling tractable planning requires developing abstract models that can represent complex, high-quality plans. However, such models often abstract away information needed to generate directly-executable plans for real-world agents in real-world environments, as planning in such detail, especially in the presence of real-world uncertainty, would be computationally intractable. In this paper, we describe the deployment of a planning system that used a hierarchy of planners to execute collaborative multiagent navigation tasks in real-world, unknown environments. By developing a planning system that was robust to failures at every level of the planning hierarchy, we enabled the team to complete collaborative navigation tasks, even in the presence of imperfect planning abstractions and real-world uncertainty. We deployed our approach on a Clearpath Husky-Jackal team navigating in a structured outdoor environment, and demonstrated that the system enabled the agents to successfully execute collaborative plans.
Create account to get full access
Overview
- This paper presents the real-world deployment of a hierarchical, uncertainty-aware collaborative multiagent planning system.
- The system is designed to coordinate the actions of multiple autonomous agents in complex, dynamic environments with uncertainty.
- The authors demonstrate the system's effectiveness through a real-world deployment in an industrial warehouse setting.
Plain English Explanation
In this paper, the researchers describe a system they developed that can coordinate the actions of multiple autonomous agents, like robots or drones, in challenging real-world environments. These environments are often unpredictable and have a lot of uncertainty, making it difficult for individual agents to plan and act effectively on their own.
The key innovation of the researchers' system is that it takes a hierarchical approach to planning. This means it breaks down the overall task into smaller, more manageable subtasks that the individual agents can work on collaboratively. Crucially, the system also accounts for the uncertainty inherent in these environments, allowing the agents to adapt their plans as situations change.
The researchers put this system to the test by deploying it in a real-world industrial warehouse setting. This is an important step, as many AI systems work well in simulation but struggle when faced with the complexities of the real world. The results show that the researchers' hierarchical, uncertainty-aware approach allowed the agents to coordinate effectively and complete their tasks efficiently, even in the face of unpredictable events and changing conditions.
Overall, this research represents an important step forward in the development of collaborative multiagent systems that can operate reliably in the real world. By incorporating uncertainty awareness and hierarchical planning, the researchers have created a system that can adapt and respond to the challenges of complex, dynamic environments. This could have valuable applications in areas like warehouse automation, search and rescue operations, and transportation logistics.
Technical Explanation
The researchers' system uses a hierarchical planning approach to coordinate the actions of multiple autonomous agents. At the highest level, a central planner decomposes the overall task into smaller subtasks that can be executed by individual agents. These subtasks are then further refined into low-level plans that account for the specific capabilities and constraints of each agent.
Crucially, the system also incorporates uncertainty awareness at every level of the hierarchy. This allows the agents to continuously monitor and update their plans based on changes in the environment, such as unexpected obstacles or failures of individual agents. The researchers use a combination of probabilistic models and multi-agent coordination algorithms to enable this adaptive planning capability.
The researchers evaluated their system in a real-world industrial warehouse setting, where a team of autonomous agents was tasked with transporting and storing a variety of items. The results showed that the hierarchical, uncertainty-aware approach allowed the agents to coordinate effectively and complete their tasks efficiently, even in the face of dynamic changes and unpredictable events.
Critical Analysis
The researchers have done a commendable job of taking their multiagent planning system out of the lab and into a real-world setting. This is an important step, as many AI systems that perform well in simulation can struggle when faced with the complexities and uncertainties of the real world.
However, the paper does not provide much detail on the specific challenges encountered during the real-world deployment or how the system was adapted to overcome them. It would be helpful to have a more in-depth discussion of the practical issues that arose and how the researchers addressed them.
Additionally, the paper does not extensively explore the limitations of the researchers' approach. For example, it is not clear how the system would scale to larger or more complex environments, or how it might perform in scenarios with more agents or more frequent disruptions. Further research and testing would be needed to fully understand the system's capabilities and boundaries.
Overall, this paper represents a significant contribution to the field of collaborative multiagent planning, but there is still room for additional exploration and refinement of the researchers' approach to address the challenges of real-world deployment.
Conclusion
This paper presents the real-world deployment of a hierarchical, uncertainty-aware collaborative multiagent planning system. The system's ability to coordinate the actions of multiple autonomous agents in complex, dynamic environments with uncertainty is a significant advancement in the field of multiagent systems.
The researchers' hierarchical planning approach, which breaks down tasks into smaller, more manageable subtasks, and their incorporation of uncertainty awareness at every level of the hierarchy, allow the agents to adapt and respond to changing conditions. The successful real-world deployment in an industrial warehouse setting demonstrates the practical value of this technology and its potential for applications in areas like warehouse automation, search and rescue, and transportation logistics.
While the paper does not delve deeply into the specific challenges encountered during the real-world deployment, it still represents an important step forward in bringing advanced multiagent planning systems out of the lab and into the real world. Further research and testing will be needed to fully understand the system's capabilities and limitations, but this work lays the groundwork for continued progress in this critical area of AI and robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
DREAM: Decentralized Real-time Asynchronous Probabilistic Trajectory Planning for Collision-free Multi-Robot Navigation in Cluttered Environments
Bask{i}n c{S}enbac{s}lar, Gaurav S. Sukhatme
0
0
Collision-free navigation in cluttered environments with static and dynamic obstacles is essential for many multi-robot tasks. Dynamic obstacles may also be interactive, i.e., their behavior varies based on the behavior of other entities. We propose a novel representation for interactive behavior of dynamic obstacles and a decentralized real-time multi-robot trajectory planning algorithm allowing inter-robot collision avoidance as well as static and dynamic obstacle avoidance. Our planner simulates the behavior of dynamic obstacles, accounting for interactivity. We account for the perception inaccuracy of static and prediction inaccuracy of dynamic obstacles. We handle asynchronous planning between teammates and message delays, drops, and re-orderings. We evaluate our algorithm in simulations using 25400 random cases and compare it against three state-of-the-art baselines using 2100 random cases. Our algorithm achieves up to 1.68x success rate using as low as 0.28x time in single-robot, and up to 2.15x success rate using as low as 0.36x time in multi-robot cases compared to the best baseline. We implement our planner on real quadrotors to show its real-world applicability.
5/21/2024
A Modular Framework for Flexible Planning in Human-Robot Collaboration
Valerio Belcamino, Mariya Kilina, Linda Lastrico, Alessandro Carf`i, Fulvio Mastrogiovanni
0
0
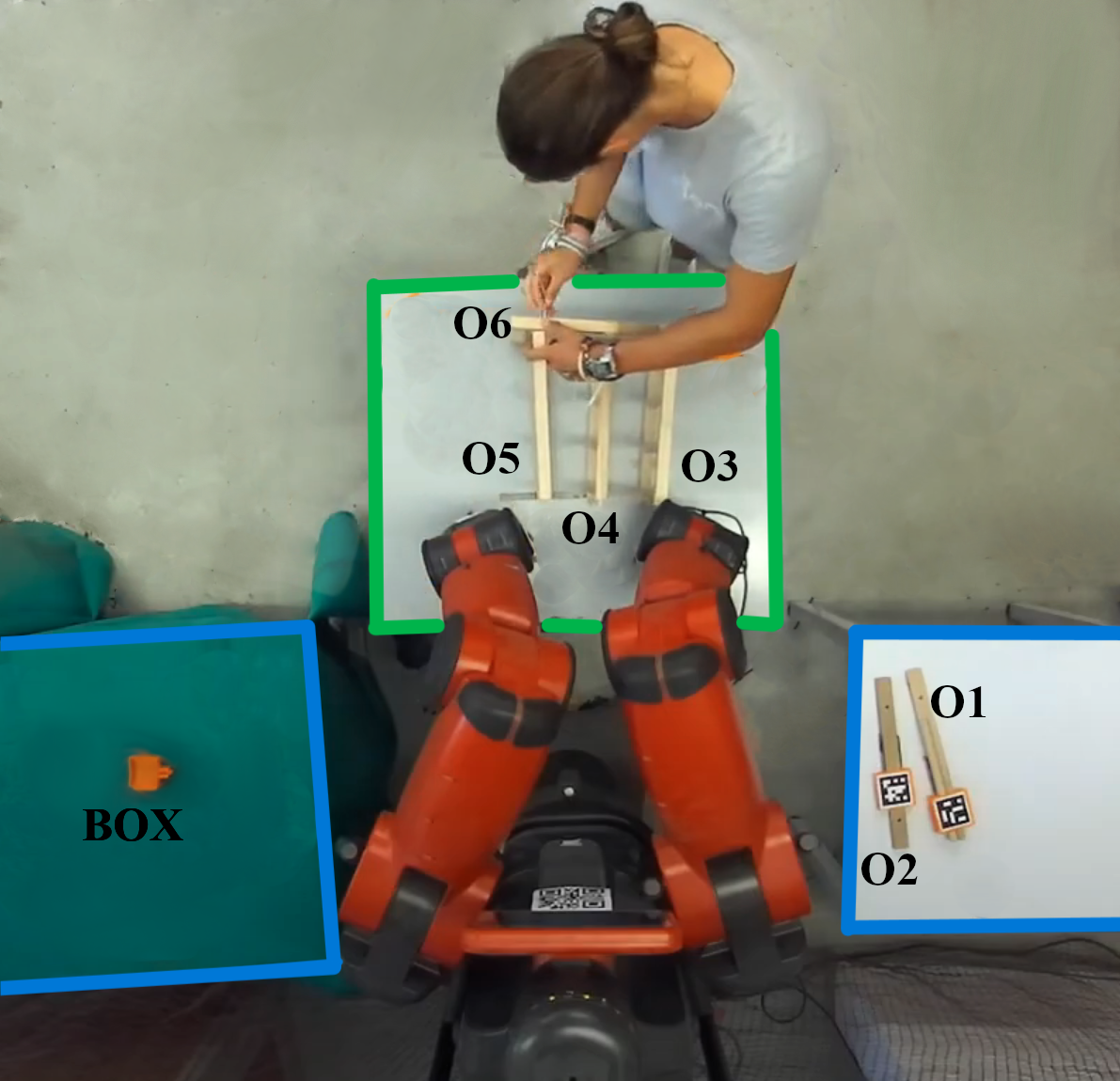
This paper presents a comprehensive framework to enhance Human-Robot Collaboration (HRC) in real-world scenarios. It introduces a formalism to model articulated tasks, requiring cooperation between two agents, through a smaller set of primitives. Our implementation leverages Hierarchical Task Networks (HTN) planning and a modular multisensory perception pipeline, which includes vision, human activity recognition, and tactile sensing. To showcase the system's scalability, we present an experimental scenario where two humans alternate in collaborating with a Baxter robot to assemble four pieces of furniture with variable components. This integration highlights promising advancements in HRC, suggesting a scalable approach for complex, cooperative tasks across diverse applications.
6/10/2024
History-Aware Planning for Risk-free Autonomous Navigation on Unknown Uneven Terrain
Yinchuan Wang, Nianfei Du, Yongsen Qin, Xiang Zhang, Rui Song, Chaoqun Wang
0
0
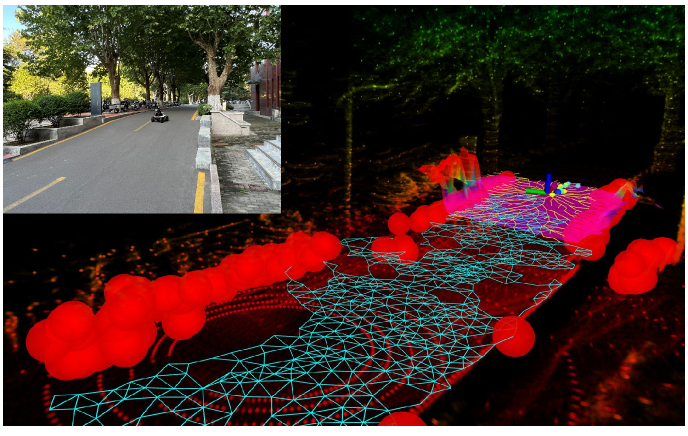
It is challenging for the mobile robot to achieve autonomous and mapless navigation in the unknown environment with uneven terrain. In this study, we present a layered and systematic pipeline. At the local level, we maintain a tree structure that is dynamically extended with the navigation. This structure unifies the planning with the terrain identification. Besides, it contributes to explicitly identifying the hazardous areas on uneven terrain. In particular, certain nodes of the tree are consistently kept to form a sparse graph at the global level, which records the history of the exploration. A series of subgoals that can be obtained in the tree and the graph are utilized for leading the navigation. To determine a subgoal, we develop an evaluation method whose input elements can be efficiently obtained on the layered structure. We conduct both simulation and real-world experiments to evaluate the developed method and its key modules. The experimental results demonstrate the effectiveness and efficiency of our method. The robot can travel through the unknown uneven region safely and reach the target rapidly without a preconstructed map.
6/5/2024

Embedded Hierarchical MPC for Autonomous Navigation
Dennis Benders, Johannes Kohler, Thijs Niesten, Robert Babuv{s}ka, Javier Alonso-Mora, Laura Ferranti
0
0
To efficiently deploy robotic systems in society, mobile robots need to autonomously and safely move through complex environments. Nonlinear model predictive control (MPC) methods provide a natural way to find a dynamically feasible trajectory through the environment without colliding with nearby obstacles. However, the limited computation power available on typical embedded robotic systems, such as quadrotors, poses a challenge to running MPC in real-time, including its most expensive tasks: constraints generation and optimization. To address this problem, we propose a novel hierarchical MPC scheme that interconnects a planning and a tracking layer. The planner constructs a trajectory with a long prediction horizon at a slow rate, while the tracker ensures trajectory tracking at a relatively fast rate. We prove that the proposed framework avoids collisions and is recursively feasible. Furthermore, we demonstrate its effectiveness in simulations and lab experiments with a quadrotor that needs to reach a goal position in a complex static environment. The code is efficiently implemented on the quadrotor's embedded computer to ensure real-time feasibility. Compared to a state-of-the-art single-layer MPC formulation, this allows us to increase the planning horizon by a factor of 5, which results in significantly better performance.
6/18/2024