RL-augmented MPC Framework for Agile and Robust Bipedal Footstep Locomotion Planning and Control

0
Sign in to get full access
Overview
- This paper presents a Reinforcement Learning (RL) augmented Model Predictive Control (MPC) framework for agile and robust bipedal footstep locomotion planning and control.
- The proposed framework combines the strengths of RL for fast and robust decision-making with the stability and constraint handling capabilities of MPC.
- The system is designed to enable bipedal robots to navigate challenging environments with dynamic obstacles and terrain variations.
Plain English Explanation
The researchers have developed a new system that allows bipedal robots (robots that walk on two legs) to move around in a flexible and reliable way, even in complex environments with obstacles and uneven terrain. Their approach combines two powerful techniques:
-
Reinforcement Learning (RL): RL is a type of machine learning where the robot learns by trial-and-error, rewarding actions that lead to good outcomes. This allows the robot to quickly make decisions and adapt to changing situations.
-
Model Predictive Control (MPC): MPC uses a mathematical model of the robot to predict the consequences of different actions and choose the best one. This provides stability and ensures the robot stays within its physical limits.
By bringing these two methods together, the researchers have created a system that can plan and control the robot's footsteps in an agile and robust way. This allows the robot to navigate challenging environments, avoid obstacles, and maintain balance, even when faced with unexpected disturbances or changes in the terrain.
Technical Explanation
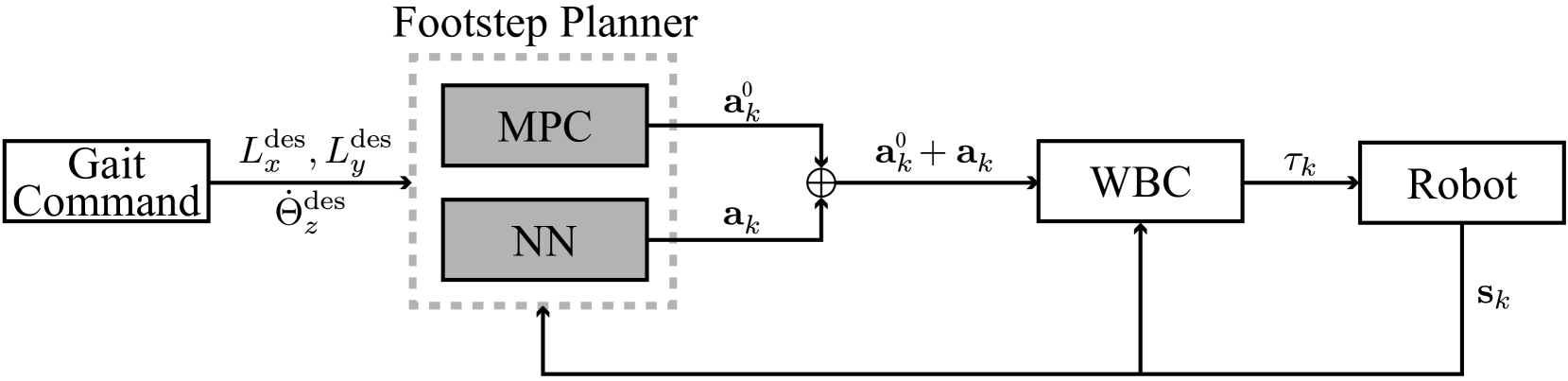
The core of the proposed framework is an RL-augmented MPC architecture. The RL component learns a policy that maps the current state of the robot and its environment to recommended footstep locations. This policy is trained using meta-reinforcement learning techniques to enable rapid adaptation to new situations.
The MPC component then takes these recommended footstep locations and plans a sequence of footsteps that satisfies the robot's physical constraints and ensures stable and efficient locomotion. This is done by formulating an optimization problem that minimizes a cost function representing factors like energy consumption, tracking error, and the risk of falling.
The researchers evaluate their framework through extensive simulation experiments, including scenarios with dynamic obstacles and terrain variations. The results demonstrate that the RL-augmented MPC approach outperforms traditional MPC-only methods in terms of agility, robustness, and computational efficiency.
Critical Analysis
The paper presents a well-designed and thorough study, with a clear motivation and a solid technical approach. The authors have carefully considered the strengths and limitations of both RL and MPC, and have crafted a complementary framework that leverages the advantages of each.
One potential area for further research could be to investigate the integration of learning-based contact planning or generic dynamic locomotion techniques to further enhance the robustness and versatility of the system.
Additionally, it would be interesting to see how the framework performs on real-world bipedal robots, as the simulation results may not fully capture the complexities of real-world environments and hardware limitations.
Conclusion
This paper presents a novel RL-augmented MPC framework for agile and robust bipedal footstep locomotion planning and control. By combining the strengths of RL and MPC, the proposed system enables bipedal robots to navigate challenging environments with dynamic obstacles and terrain variations in a reliable and efficient manner.
The simulation results demonstrate the effectiveness of the approach, and the authors have outlined several promising directions for future research. If successfully implemented on physical robots, this framework could have significant implications for the development of more capable and versatile legged robots, with potential applications in areas such as search and rescue, disaster response, and exploration.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
RL-augmented MPC Framework for Agile and Robust Bipedal Footstep Locomotion Planning and Control
Seung Hyeon Bang, Carlos Arribalzaga Jov'e, Luis Sentis
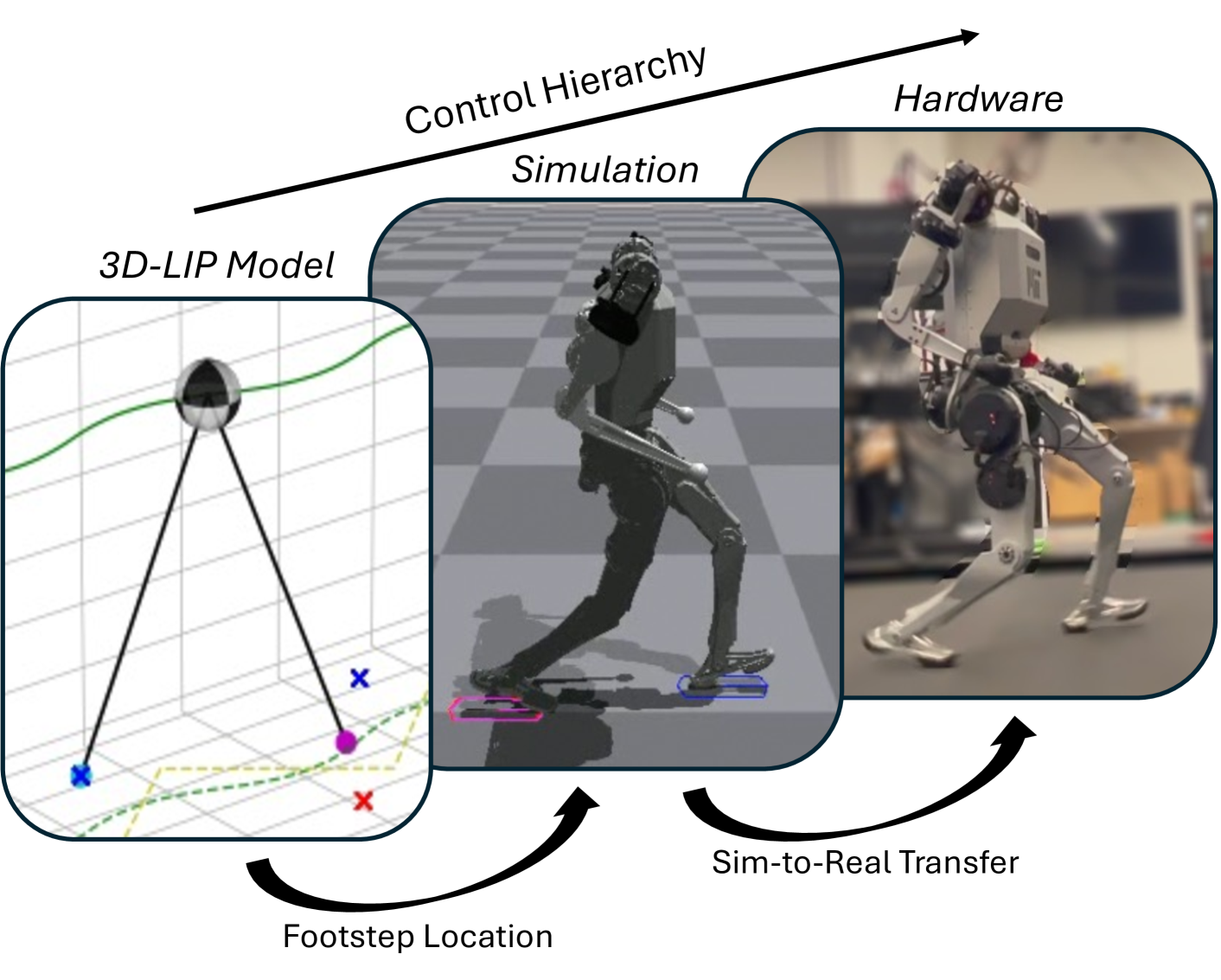
This paper proposes an online bipedal footstep planning strategy that combines model predictive control (MPC) and reinforcement learning (RL) to achieve agile and robust bipedal maneuvers. While MPC-based foot placement controllers have demonstrated their effectiveness in achieving dynamic locomotion, their performance is often limited by the use of simplified models and assumptions. To address this challenge, we develop a novel foot placement controller that leverages a learned policy to bridge the gap between the use of a simplified model and the more complex full-order robot system. Specifically, our approach employs a unique combination of an ALIP-based MPC foot placement controller for sub-optimal footstep planning and the learned policy for refining footstep adjustments, enabling the resulting footstep policy to capture the robot's whole-body dynamics effectively. This integration synergizes the predictive capability of MPC with the flexibility and adaptability of RL. We validate the effectiveness of our framework through a series of experiments using the full-body humanoid robot DRACO 3. The results demonstrate significant improvements in dynamic locomotion performance, including better tracking of a wide range of walking speeds, enabling reliable turning and traversing challenging terrains while preserving the robustness and stability of the walking gaits compared to the baseline ALIP-based MPC approach.
Read more7/26/2024
0
Integrating Model-Based Footstep Planning with Model-Free Reinforcement Learning for Dynamic Legged Locomotion
Ho Jae Lee, Seungwoo Hong, Sangbae Kim
In this work, we introduce a control framework that combines model-based footstep planning with Reinforcement Learning (RL), leveraging desired footstep patterns derived from the Linear Inverted Pendulum (LIP) dynamics. Utilizing the LIP model, our method forward predicts robot states and determines the desired foot placement given the velocity commands. We then train an RL policy to track the foot placements without following the full reference motions derived from the LIP model. This partial guidance from the physics model allows the RL policy to integrate the predictive capabilities of the physics-informed dynamics and the adaptability characteristics of the RL controller without overfitting the policy to the template model. Our approach is validated on the MIT Humanoid, demonstrating that our policy can achieve stable yet dynamic locomotion for walking and turning. We further validate the adaptability and generalizability of our policy by extending the locomotion task to unseen, uneven terrain. During the hardware deployment, we have achieved forward walking speeds of up to 1.5 m/s on a treadmill and have successfully performed dynamic locomotion maneuvers such as 90-degree and 180-degree turns.
Read more8/6/2024
0
New!PIP-Loco: A Proprioceptive Infinite Horizon Planning Framework for Quadrupedal Robot Locomotion
Aditya Shirwatkar, Naman Saxena, Kishore Chandra, Shishir Kolathaya
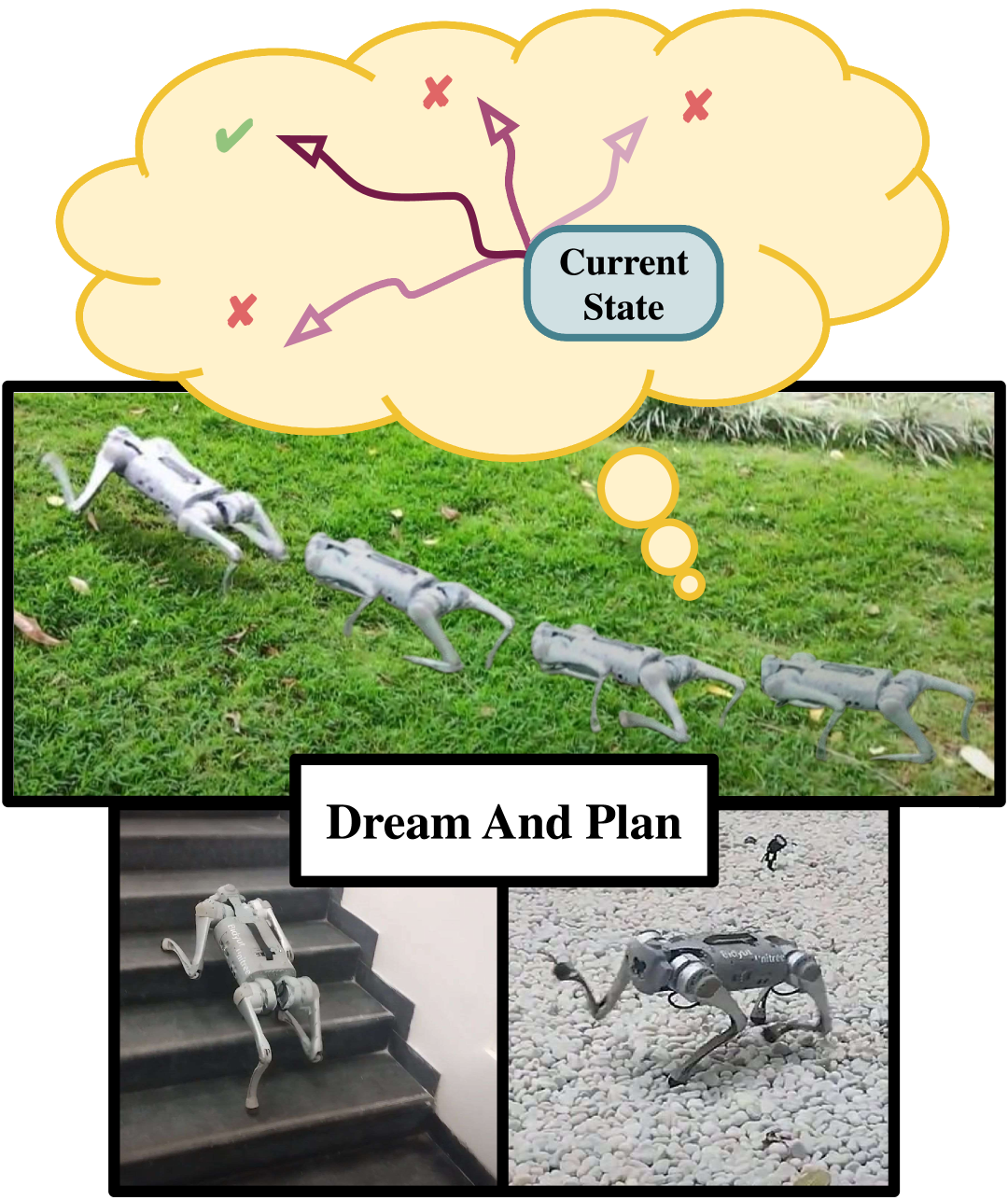
A core strength of Model Predictive Control (MPC) for quadrupedal locomotion has been its ability to enforce constraints and provide interpretability of the sequence of commands over the horizon. However, despite being able to plan, MPC struggles to scale with task complexity, often failing to achieve robust behavior on rapidly changing surfaces. On the other hand, model-free Reinforcement Learning (RL) methods have outperformed MPC on multiple terrains, showing emergent motions but inherently lack any ability to handle constraints or perform planning. To address these limitations, we propose a framework that integrates proprioceptive planning with RL, allowing for agile and safe locomotion behaviors through the horizon. Inspired by MPC, we incorporate an internal model that includes a velocity estimator and a Dreamer module. During training, the framework learns an expert policy and an internal model that are co-dependent, facilitating exploration for improved locomotion behaviors. During deployment, the Dreamer module solves an infinite-horizon MPC problem, adapting actions and velocity commands to respect the constraints. We validate the robustness of our training framework through ablation studies on internal model components and demonstrate improved robustness to training noise. Finally, we evaluate our approach across multi-terrain scenarios in both simulation and hardware.
Read more9/17/2024
🏅
0
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion Control
Zhongyu Li, Xue Bin Peng, Pieter Abbeel, Sergey Levine, Glen Berseth, Koushil Sreenath
This paper presents a comprehensive study on using deep reinforcement learning (RL) to create dynamic locomotion controllers for bipedal robots. Going beyond focusing on a single locomotion skill, we develop a general control solution that can be used for a range of dynamic bipedal skills, from periodic walking and running to aperiodic jumping and standing. Our RL-based controller incorporates a novel dual-history architecture, utilizing both a long-term and short-term input/output (I/O) history of the robot. This control architecture, when trained through the proposed end-to-end RL approach, consistently outperforms other methods across a diverse range of skills in both simulation and the real world. The study also delves into the adaptivity and robustness introduced by the proposed RL system in developing locomotion controllers. We demonstrate that the proposed architecture can adapt to both time-invariant dynamics shifts and time-variant changes, such as contact events, by effectively using the robot's I/O history. Additionally, we identify task randomization as another key source of robustness, fostering better task generalization and compliance to disturbances. The resulting control policies can be successfully deployed on Cassie, a torque-controlled human-sized bipedal robot. This work pushes the limits of agility for bipedal robots through extensive real-world experiments. We demonstrate a diverse range of locomotion skills, including: robust standing, versatile walking, fast running with a demonstration of a 400-meter dash, and a diverse set of jumping skills, such as standing long jumps and high jumps.
Read more8/27/2024