RMS: Redundancy-Minimizing Point Cloud Sampling for Real-Time Pose Estimation

0
👨🏫
Sign in to get full access
Overview
- Typical point cloud sampling methods used in mobile robot state estimation preserve high levels of redundant information
- This redundancy slows down the estimation pipeline and can cause drift under real-time constraints, which is problematic for resource-constrained robots like UAVs
- The paper proposes a novel point cloud sampling method called RMS that minimizes redundancy while maintaining observability for robot ego-motion estimation
Plain English Explanation
Point clouds are 3D representations of the world often used by mobile robots like self-driving cars and drones to understand their surroundings. The standard ways of sampling these point clouds tend to keep a lot of duplicate information, which slows down the robot's ability to process the data and figure out where it is (localization). This delay can be a problem, especially for agile robots that need to react quickly.
The researchers developed a new point cloud sampling technique called RMS that reduces this redundant information while still preserving the key details the robot needs to localize itself. RMS works by examining the "gradient flow" - or the patterns in the 3D surface - of the point cloud and keeping just the most informative points. This helps the robot quickly and accurately figure out its position and orientation (pose estimation) without being bogged down by unnecessary data.
Technical Explanation
The paper proposes a novel, deterministic, uninformed, and single-parameter point cloud sampling method called RMS (Redundancy Minimizing Sampling) that minimizes redundancy within a 3D point cloud. In contrast to prior state-of-the-art approaches, RMS balances the translation-space observability by leveraging the fact that linear and planar surfaces inherently exhibit high redundancy that gets propagated into iterative estimation pipelines.
The authors define the concept of "gradient flow", which quantifies the local surface underlying a point. They show that maximizing the entropy of the gradient flow minimizes point redundancy for robot ego-motion estimation. RMS is then integrated into both point-based (KISS-ICP) and feature-based (LOAM) odometry pipelines and evaluated on the KITTI, Hilti-Oxford, and custom UAV datasets.
The experiments demonstrate that RMS outperforms state-of-the-art methods in terms of speed, compression ratio, and accuracy, especially in geometrically-degenerated settings where many existing approaches struggle.
Critical Analysis
The paper provides a convincing technical justification for the RMS sampling method and rigorously evaluates it against prior art. However, the authors acknowledge that RMS may not be optimal in all scenarios, particularly for applications with very tight real-time constraints or where the environment exhibits high geometric complexity.
Additionally, the entropy-based criterion for point selection, while effective, could potentially overlook other important factors like sensor noise or occlusions that may impact downstream localization and mapping performance. Further research could explore hybrid approaches that combine RMS with other heuristics or learning-based methods to address these limitations.
Overall, the RMS technique represents a promising advance in efficient 3D point cloud processing for mobile robot applications, and the insights around leveraging gradient flow patterns are likely to inspire future work in this area.
Conclusion
This paper presents a novel point cloud sampling method called RMS that significantly reduces redundant information in 3D data while preserving key details for accurate robot localization. By exploiting the inherent surface characteristics of point clouds, RMS outperforms existing techniques in terms of speed, compression, and robustness.
The ability to process point cloud data more efficiently has important implications for resource-constrained mobile robots, enabling them to operate with lower latency and higher accuracy - crucial capabilities for applications like autonomous navigation, exploration, and mapping. The RMS approach represents an important step forward in making 3D perception systems more practical and accessible for a wide range of robotic platforms.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👨🏫
0
RMS: Redundancy-Minimizing Point Cloud Sampling for Real-Time Pose Estimation
Pavel Petracek, Kostas Alexis, Martin Saska
The typical point cloud sampling methods used in state estimation for mobile robots preserve a high level of point redundancy. This redundancy unnecessarily slows down the estimation pipeline and may cause drift under real-time constraints. Such undue latency becomes a bottleneck for resource-constrained robots (especially UAVs), requiring minimal delay for agile and accurate operation. We propose a novel, deterministic, uninformed, and single-parameter point cloud sampling method named RMS that minimizes redundancy within a 3D point cloud. In contrast to the state of the art, RMS balances the translation-space observability by leveraging the fact that linear and planar surfaces inherently exhibit high redundancy propagated into iterative estimation pipelines. We define the concept of gradient flow, quantifying the local surface underlying a point. We also show that maximizing the entropy of the gradient flow minimizes point redundancy for robot ego-motion estimation. We integrate RMS into the point-based KISS-ICP and feature-based LOAM odometry pipelines and evaluate experimentally on KITTI, Hilti-Oxford, and custom datasets from multirotor UAVs. The experiments demonstrate that RMS outperforms state-of-the-art methods in speed, compression, and accuracy in well-conditioned as well as in geometrically-degenerated settings.
Read more4/24/2024

0
Enhancing Sampling Protocol for Robust Point Cloud Classification
Chongshou Li, Pin Tang, Xinke Li, Tianrui Li
Established sampling protocols for 3D point cloud learning, such as Farthest Point Sampling (FPS) and Fixed Sample Size (FSS), have long been recognized and utilized. However, real-world data often suffer from corrputions such as sensor noise, which violates the benignness assumption of point cloud in current protocols. Consequently, they are notably vulnerable to noise, posing significant safety risks in critical applications like autonomous driving. To address these issues, we propose an enhanced point cloud sampling protocol, PointDR, which comprises two components: 1) Downsampling for key point identification and 2) Resampling for flexible sample size. Furthermore, differentiated strategies are implemented for training and inference processes. Particularly, an isolation-rated weight considering local density is designed for the downsampling method, assisting it in performing random key points selection in the training phase and bypassing noise in the inference phase. A local-geometry-preserved upsampling is incorporated into resampling, facilitating it to maintain a stochastic sample size in the training stage and complete insufficient data in the inference. It is crucial to note that the proposed protocol is free of model architecture altering and extra learning, thus minimal efforts are demanded for its replacement of the existing one. Despite the simplicity, it substantially improves the robustness of point cloud learning, showcased by outperforming the state-of-the-art methods on multiple benchmarks of corrupted point cloud classification. The code will be available upon the paper's acceptance.
Read more8/23/2024
0
RMS-FlowNet++: Efficient and Robust Multi-Scale Scene Flow Estimation for Large-Scale Point Clouds
Ramy Battrawy, Ren'e Schuster, Didier Stricker
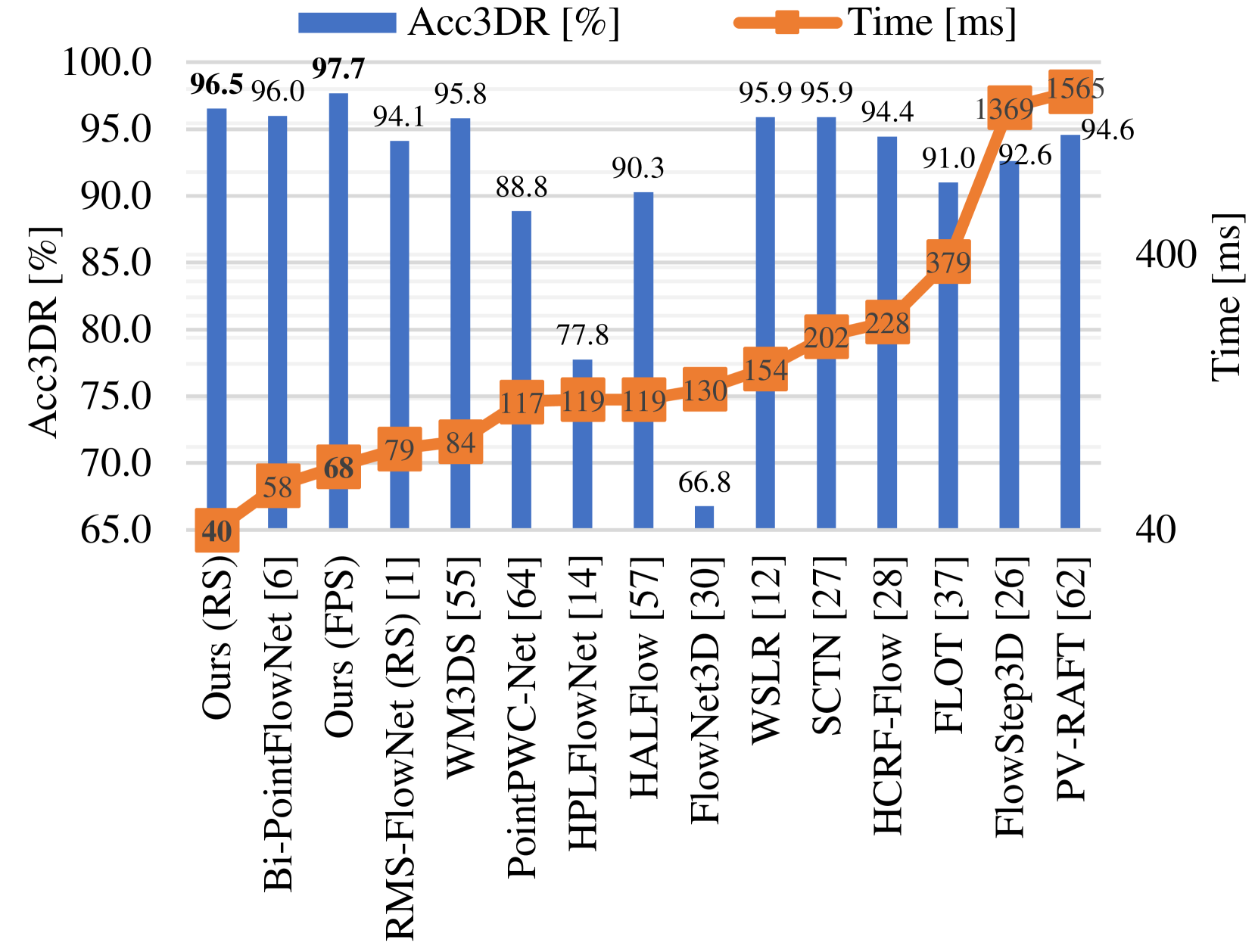
The proposed RMS-FlowNet++ is a novel end-to-end learning-based architecture for accurate and efficient scene flow estimation that can operate on high-density point clouds. For hierarchical scene f low estimation, existing methods rely on expensive Farthest-Point-Sampling (FPS) to sample the scenes, must find large correspondence sets across the consecutive frames and/or must search for correspondences at a full input resolution. While this can improve the accuracy, it reduces the overall efficiency of these methods and limits their ability to handle large numbers of points due to memory requirements. In contrast to these methods, our architecture is based on an efficient design for hierarchical prediction of multi-scale scene flow. To this end, we develop a special flow embedding block that has two advantages over the current methods: First, a smaller correspondence set is used, and second, the use of Random-Sampling (RS) is possible. In addition, our architecture does not need to search for correspondences at a full input resolution. Exhibiting high accuracy, our RMS-FlowNet++ provides a faster prediction than state-of-the-art methods, avoids high memory requirements and enables efficient scene flow on dense point clouds of more than 250K points at once. Our comprehensive experiments verify the accuracy of RMS FlowNet++ on the established FlyingThings3D data set with different point cloud densities and validate our design choices. Furthermore, we demonstrate that our model has a competitive ability to generalize to the real-world scenes of the KITTI data set without fine-tuning.
Read more7/2/2024

0
Refining 3D Point Cloud Normal Estimation via Sample Selection
Jun Zhou, Yaoshun Li, Hongchen Tan, Mingjie Wang, Nannan Li, Xiuping Liu
In recent years, point cloud normal estimation, as a classical and foundational algorithm, has garnered extensive attention in the field of 3D geometric processing. Despite the remarkable performance achieved by current Neural Network-based methods, their robustness is still influenced by the quality of training data and the models' performance. In this study, we designed a fundamental framework for normal estimation, enhancing existing model through the incorporation of global information and various constraint mechanisms. Additionally, we employed a confidence-based strategy to select the reasonable samples for fair and robust network training. The introduced sample confidence can be integrated into the loss function to balance the influence of different samples on model training. Finally, we utilized existing orientation methods to correct estimated non-oriented normals, achieving state-of-the-art performance in both oriented and non-oriented tasks. Extensive experimental results demonstrate that our method works well on the widely used benchmarks.
Read more6/28/2024