RNb-NeuS: Reflectance and Normal-based Multi-View 3D Reconstruction

0

Sign in to get full access
Overview
- RNb-NeuS is a novel approach for multi-view 3D reconstruction that utilizes reflectance and normal information from input images.
- It combines the strengths of traditional methods and neural rendering techniques, enabling high-quality reconstruction of both geometry and appearance.
- The method is divided into two stages: a coarse geometry estimation stage and a fine-grained geometry and appearance optimization stage.
- RNb-NeuS introduces a reflectance-based rendering loss and a normal-based geometric loss to improve the reconstruction quality.
- Experiments demonstrate that RNb-NeuS outperforms existing methods in terms of geometry accuracy and appearance fidelity.
Plain English Explanation
Imagine you have a collection of photographs taken from different angles of an object or scene. The goal is to create a detailed 3D model that captures not only the shape but also the appearance (colors, textures, and reflections) of the subject. This is a challenging task because the photographs provide limited information, and combining them into a coherent 3D model is complex.
RNb-NeuS is a new approach that tackles this problem by cleverly using two types of information: the way light reflects off surfaces (reflectance) and the orientation of those surfaces (normals). It does this in two steps:
- Coarse Geometry Estimation: First, it estimates the rough shape of the object or scene using traditional methods.
- Fine-grained Optimization: Then, it refines the shape and appearance details by analyzing the reflectance and normal information in the input images.
The key innovations are the introduction of a reflectance-based rendering loss and a normal-based geometric loss. The rendering loss helps improve the appearance by ensuring that the rendered 3D model matches the reflectance patterns in the input images. The geometric loss helps refine the shape by ensuring that the surface orientations (normals) in the 3D model align with those observed in the input images.
This combination of traditional methods and neural rendering techniques allows RNb-NeuS to create highly detailed and accurate 3D models, capturing both the geometry and the appearance of the subject with impressive fidelity.
Technical Explanation
RNb-NeuS is a two-stage approach for multi-view 3D reconstruction. The first stage estimates a coarse geometry using traditional techniques, such as multi-view stereo or structure-from-motion. This initial geometry serves as a starting point for the second stage.
The second stage is an optimization process that refines the geometry and appearance using a neural rendering framework. The key innovations in this stage are the introduction of a reflectance-based rendering loss and a normal-based geometric loss.
The reflectance-based rendering loss ensures that the rendered images from the optimized 3D model match the input images in terms of reflectance patterns. This is achieved by comparing the rendered images with the input images using a reflectance-based similarity metric.
The normal-based geometric loss ensures that the surface normals of the optimized 3D model align with the normals estimated from the input images. This is done by comparing the normals computed from the optimized 3D model with those estimated from the input images using a normal-based similarity metric.
The optimization process iteratively updates the geometry and appearance parameters of the neural rendering model to minimize the combined loss, which includes the reflectance-based rendering loss, the normal-based geometric loss, and additional regularization terms.
RNb-NeuS employs a neural rendering framework that represents the 3D scene as a neural radiance field, allowing for high-quality rendering and efficient optimization. The experiments demonstrate that RNb-NeuS outperforms existing methods in terms of geometry accuracy and appearance fidelity on several challenging datasets.
Critical Analysis
While RNb-NeuS presents an innovative approach to multi-view 3D reconstruction, there are several potential limitations and areas for further research:
-
Computational Complexity: The optimization process involving the neural rendering framework and the additional losses can be computationally expensive, especially for large-scale scenes or high-resolution inputs.
-
Sensitivity to Initial Geometry: The quality of the initial coarse geometry estimation can significantly impact the final reconstruction results. Errors or inaccuracies in the initial geometry may be difficult to correct during the optimization stage.
-
Reliance on Reflectance and Normal Information: The method heavily relies on accurate estimation of reflectance and normal information from the input images. In scenarios with challenging lighting conditions, material properties, or low-quality input data, the performance may degrade.
-
Generalization to Diverse Scenes: The experiments in the paper focus on a limited set of scenes and objects. Further evaluation is needed to assess the method's performance on a wider range of scenarios, including outdoor environments, complex geometries, and diverse material properties.
-
Scalability and Real-time Applications: While the method demonstrates impressive results, it may not be suitable for real-time applications or scenarios requiring instantaneous reconstruction due to the computational complexity involved.
-
Potential for Oversmoothing: The use of regularization terms and the optimization process may lead to oversmoothing of fine geometric details or appearance variations, particularly in textured or complex regions.
It is important to acknowledge these potential limitations and encourage further research to address them. Additionally, readers should critically evaluate the presented results, consider alternative approaches, and form their own opinions about the method's strengths and weaknesses.
Conclusion
RNb-NeuS represents a significant advancement in multi-view 3D reconstruction, bridging the gap between traditional methods and neural rendering techniques. By leveraging reflectance and normal information, it achieves high-quality reconstruction of both geometry and appearance, outperforming existing methods in terms of accuracy and fidelity.
The introduction of the reflectance-based rendering loss and the normal-based geometric loss is a novel contribution that improves the reconstruction quality by effectively combining appearance and geometric cues from the input images.
While the method shows promising results, it is essential to consider its potential limitations, such as computational complexity, sensitivity to initial geometry, and reliance on accurate reflectance and normal estimation. Further research is needed to address these limitations and explore the method's applicability to diverse scenarios and real-time applications.
The implications of RNb-NeuS extend beyond computer graphics and 3D reconstruction. Accurate and high-fidelity 3D models have applications in various fields, including virtual and augmented reality, cultural heritage preservation, engineering and design, and scientific visualization. As the field of neural rendering continues to evolve, methods like RNb-NeuS pave the way for more realistic and immersive digital representations of the world around us.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
RNb-NeuS: Reflectance and Normal-based Multi-View 3D Reconstruction
Baptiste Brument, Robin Bruneau, Yvain Qu'eau, Jean M'elou, Franc{c}ois Bernard Lauze, Jean-Denis, Jean-Denis Durou, Lilian Calvet
This paper introduces a versatile paradigm for integrating multi-view reflectance (optional) and normal maps acquired through photometric stereo. Our approach employs a pixel-wise joint re-parameterization of reflectance and normal, considering them as a vector of radiances rendered under simulated, varying illumination. This re-parameterization enables the seamless integration of reflectance and normal maps as input data in neural volume rendering-based 3D reconstruction while preserving a single optimization objective. In contrast, recent multi-view photometric stereo (MVPS) methods depend on multiple, potentially conflicting objectives. Despite its apparent simplicity, our proposed approach outperforms state-of-the-art approaches in MVPS benchmarks across F-score, Chamfer distance, and mean angular error metrics. Notably, it significantly improves the detailed 3D reconstruction of areas with high curvature or low visibility.
Read more4/1/2024
0
High-Fidelity Mask-free Neural Surface Reconstruction for Virtual Reality
Haotian Bai, Yize Chen, Lin Wang
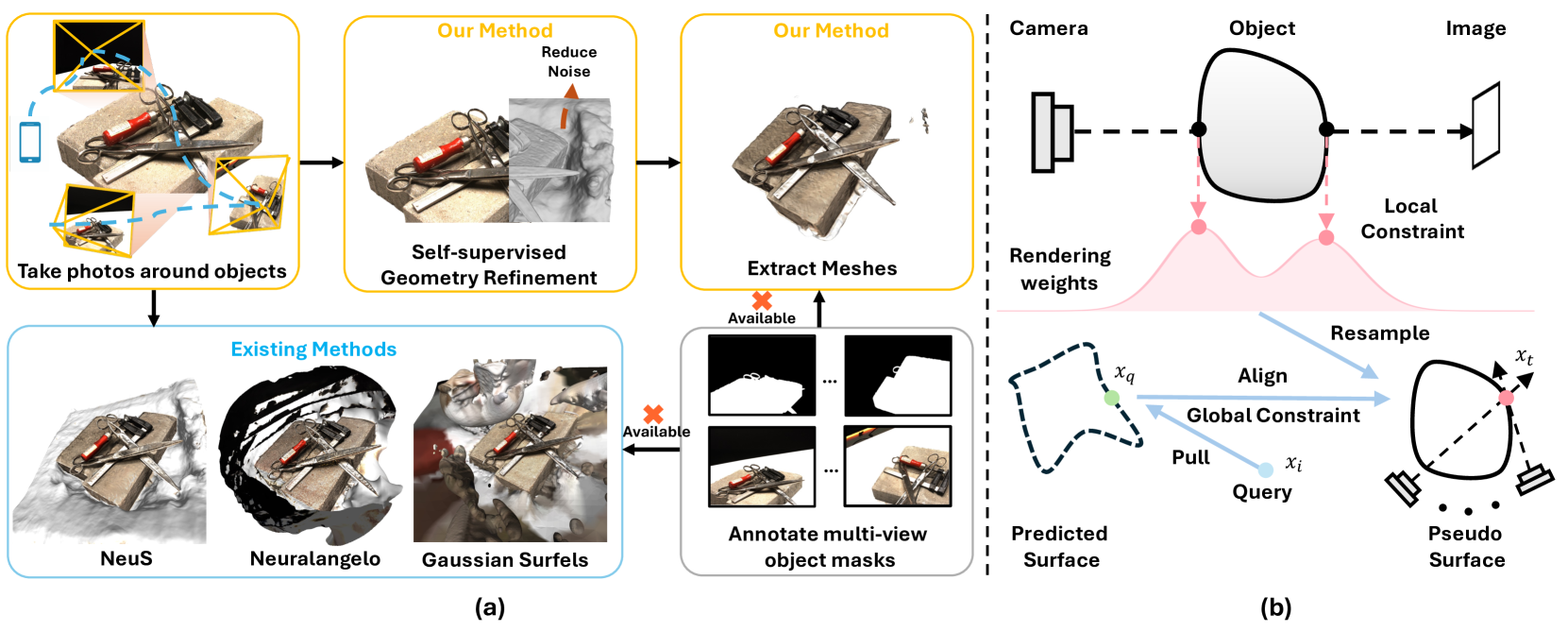
Object-centric surface reconstruction from multi-view images is crucial in creating editable digital assets for AR/VR. Due to the lack of geometric constraints, existing methods, e.g., NeuS necessitate annotating the object masks to reconstruct compact surfaces in mesh processing. Mask annotation, however, incurs considerable labor costs due to its cumbersome nature. This paper presents Hi-NeuS, a novel rendering-based framework for neural implicit surface reconstruction, aiming to recover compact and precise surfaces without multi-view object masks. Our key insight is that the overlapping regions in the object-centric views naturally highlight the object of interest as the camera orbits around objects. The object of interest can be specified by estimating the distribution of the rendering weights accumulated from multiple views, which implicitly identifies the surface that a user intends to capture. This inspires us to design a geometric refinement approach, which takes multi-view rendering weights to guide the signed distance functions (SDF) of neural surfaces in a self-supervised manner. Specifically, it retains these weights to resample a pseudo surface based on their distribution. This facilitates the alignment of the SDF to the object of interest. We then regularize the SDF's bias for geometric consistency. Moreover, we propose to use unmasked Chamfer Distance(CD) to measure the extracted mesh without post-processing for more precise evaluation. Our approach has been validated through NeuS and its variant Neuralangelo, demonstrating its adaptability across different NeuS backbones. Extensive benchmark on the DTU dataset shows that our method reduces surface noise by about 20%, and improves the unmasked CD by around 30%, achieving better surface details. The superiority of Hi-NeuS is further validated on BlendedMVS and handheld camera captures for content creation.
Read more9/23/2024

0
RaNeuS: Ray-adaptive Neural Surface Reconstruction
Yida Wang, David Joseph Tan, Nassir Navab, Federico Tombari
Our objective is to leverage a differentiable radiance field eg NeRF to reconstruct detailed 3D surfaces in addition to producing the standard novel view renderings. There have been related methods that perform such tasks, usually by utilizing a signed distance field (SDF). However, the state-of-the-art approaches still fail to correctly reconstruct the small-scale details, such as the leaves, ropes, and textile surfaces. Considering that different methods formulate and optimize the projection from SDF to radiance field with a globally constant Eikonal regularization, we improve with a ray-wise weighting factor to prioritize the rendering and zero-crossing surface fitting on top of establishing a perfect SDF. We propose to adaptively adjust the regularization on the signed distance field so that unsatisfying rendering rays won't enforce strong Eikonal regularization which is ineffective, and allow the gradients from regions with well-learned radiance to effectively back-propagated to the SDF. Consequently, balancing the two objectives in order to generate accurate and detailed surfaces. Additionally, concerning whether there is a geometric bias between the zero-crossing surface in SDF and rendering points in the radiance field, the projection becomes adjustable as well depending on different 3D locations during optimization. Our proposed textit{RaNeuS} are extensively evaluated on both synthetic and real datasets, achieving state-of-the-art results on both novel view synthesis and geometric reconstruction.
Read more6/17/2024
0
NPLMV-PS: Neural Point-Light Multi-View Photometric Stereo
Fotios Logothetis, Ignas Budvytis, Roberto Cipolla
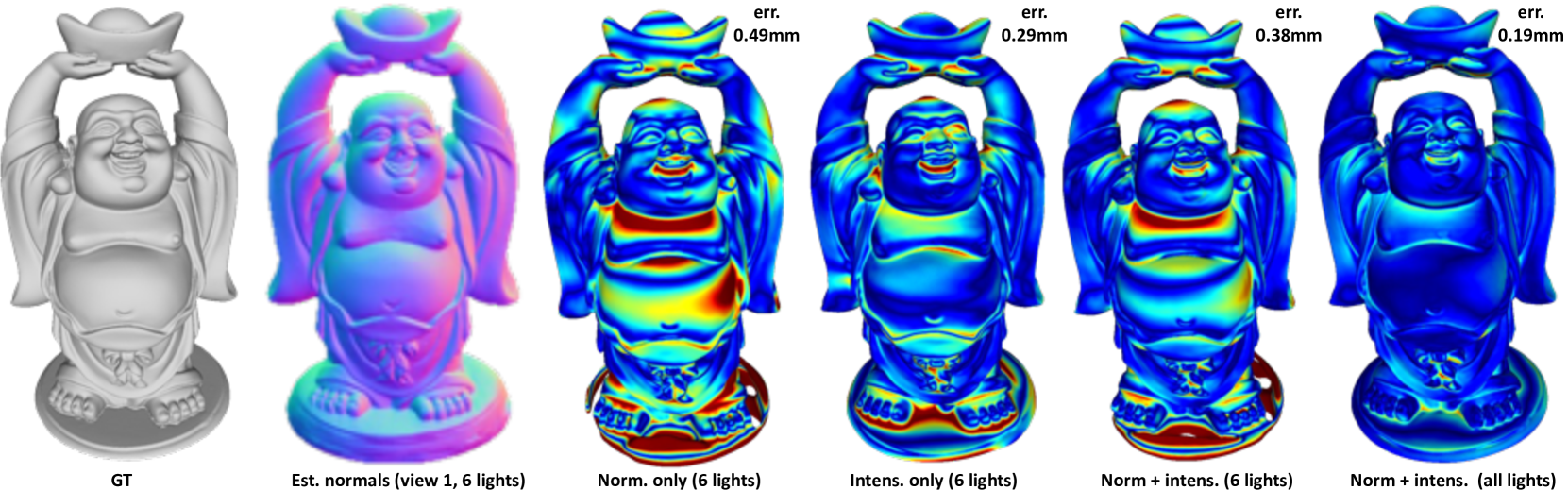
In this work we present a novel multi-view photometric stereo (MVPS) method. Like many works in 3D reconstruction we are leveraging neural shape representations and learnt renderers. However, our work differs from the state-of-the-art multi-view PS methods such as PS-NeRF or Supernormal in that we explicitly leverage per-pixel intensity renderings rather than relying mainly on estimated normals. We model point light attenuation and explicitly raytrace cast shadows in order to best approximate the incoming radiance for each point. The estimated incoming radiance is used as input to a fully neural material renderer that uses minimal prior assumptions and it is jointly optimised with the surface. Estimated normals and segmentation maps are also incorporated in order to maximise the surface accuracy. Our method is among the first (along with Supernormal) to outperform the classical MVPS approach proposed by the DiLiGenT-MV benchmark and achieves average 0.2mm Chamfer distance for objects imaged at approx 1.5m distance away with approximate 400x400 resolution. Moreover, our method shows high robustness to the sparse MVPS setup (6 views, 6 lights) greatly outperforming the SOTA competitor (0.38mm vs 0.61mm), illustrating the importance of neural rendering in multi-view photometric stereo.
Read more7/23/2024