RoboPack: Learning Tactile-Informed Dynamics Models for Dense Packing

0

Sign in to get full access
Overview
- This research paper presents RoboPack, a system that learns tactile-informed dynamics models for dense packing tasks.
- The key idea is to use tactile feedback from the robot's sensors to improve the accuracy of its dynamics models, allowing it to better navigate and manipulate objects in crowded environments.
- The authors demonstrate the effectiveness of their approach through a series of experiments in both simulation and the real world.
Plain English Explanation
The researchers developed a system called RoboPack that helps robots pack objects more efficiently in crowded environments. Robots often struggle with this task because it's hard for them to accurately predict how objects will move and interact with each other. RoboPack solves this by using the robot's tactile sensors to gather information about the objects and their movements. This tactile feedback allows the robot to build better models of the object dynamics, so it can plan its actions more effectively and avoid collisions.
In this related work, the authors showed how tactile sensing can help robots navigate through cluttered spaces. Similarly, this paper demonstrates how tactile feedback can improve a robot's ability to insert objects precisely. The active exploration approach and soft contact simulation techniques from related research also inform the RoboPack system.
Overall, the key innovation of RoboPack is its use of tactile sensing to build more accurate models of how objects interact in dense packing tasks. This allows the robot to plan and execute its movements more effectively, leading to faster and more efficient packing.
Technical Explanation
The RoboPack system learns dynamics models that predict how objects will move and interact during dense packing tasks. The core of the approach is to incorporate tactile feedback from the robot's sensors into the dynamics models, which helps capture the complex contact dynamics that occur when objects are packed closely together.
The authors first collect a dataset of packing interactions, recording the robot's actions, the object states, and the tactile sensor readings. They then use this data to train a neural network that can predict the future object states given the current state and the robot's actions. Critically, the network also takes the tactile sensor readings as input, allowing it to learn how physical contact affects the object dynamics.
The trained dynamics model is then used by the robot's planning system to simulate potential packing actions and select the ones that are most likely to succeed. In experiments, the RoboPack system demonstrated significant improvements in packing efficiency compared to baselines that did not use tactile feedback. The authors also showed that the tactile-informed models generalized well to new object configurations and environments.
Critical Analysis
The RoboPack paper makes a compelling case for the value of tactile sensing in dense packing tasks. By incorporating this additional sensory modality, the system is able to build more accurate dynamics models and plan more effectively. However, the authors acknowledge some limitations of their approach.
First, the current RoboPack implementation relies on a specific type of tactile sensor that may not be available on all robotic platforms. Exploring ways to utilize more general-purpose tactile sensing hardware would increase the accessibility of the approach.
Additionally, the experiments were conducted in relatively simple, controlled environments. Scaling the system to handle more complex, cluttered real-world scenarios with unpredictable object interactions remains an open challenge. This related work on combining visual and tactile perception could provide insights for addressing this limitation.
Overall, the RoboPack research represents an important step forward in leveraging tactile feedback for improving robotic manipulation capabilities. Further advancements in this direction have the potential to enable robots to operate more effectively in crowded, unstructured environments.
Conclusion
The RoboPack system demonstrates the value of incorporating tactile sensing into robotic dynamics models for dense packing tasks. By learning to predict object interactions based on both kinematic and tactile information, the robot can plan and execute its movements more efficiently, leading to faster and more reliable packing performance.
This research builds on a growing body of work exploring the use of tactile feedback in robotic manipulation, from obstacle avoidance to precision insertion. As robots continue to operate in increasingly complex, cluttered environments, techniques like RoboPack will become increasingly important for enabling them to navigate and interact with the world in a more robust and intelligent manner.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
RoboPack: Learning Tactile-Informed Dynamics Models for Dense Packing
Bo Ai, Stephen Tian, Haochen Shi, Yixuan Wang, Cheston Tan, Yunzhu Li, Jiajun Wu
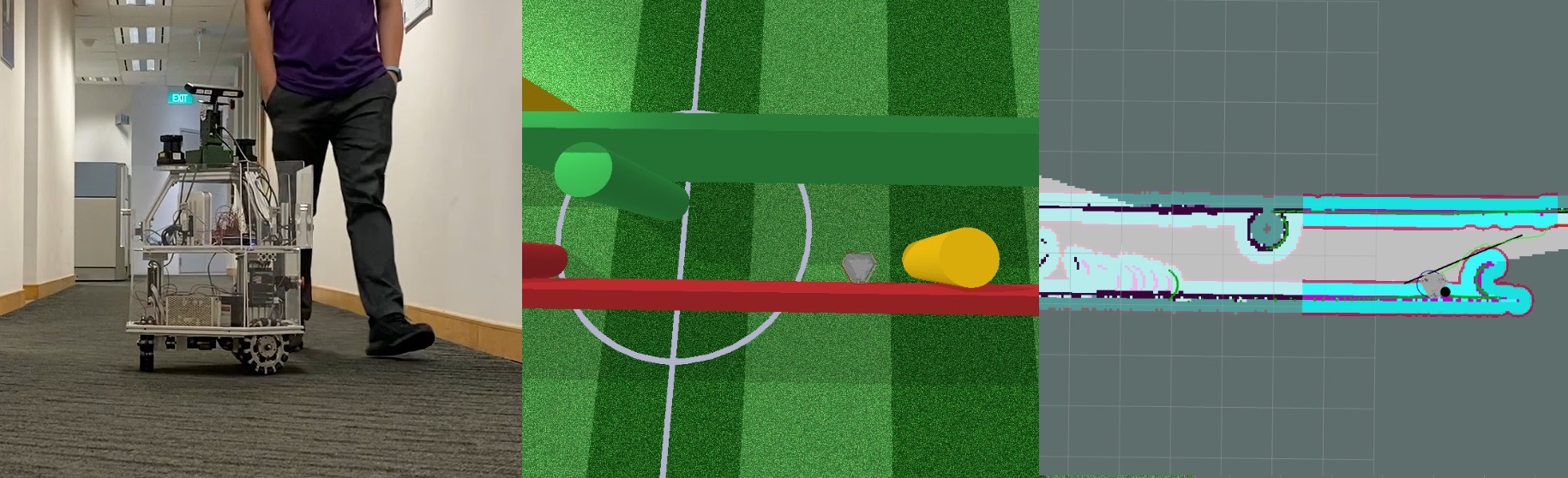
Tactile feedback is critical for understanding the dynamics of both rigid and deformable objects in many manipulation tasks, such as non-prehensile manipulation and dense packing. We introduce an approach that combines visual and tactile sensing for robotic manipulation by learning a neural, tactile-informed dynamics model. Our proposed framework, RoboPack, employs a recurrent graph neural network to estimate object states, including particles and object-level latent physics information, from historical visuo-tactile observations and to perform future state predictions. Our tactile-informed dynamics model, learned from real-world data, can solve downstream robotics tasks with model-predictive control. We demonstrate our approach on a real robot equipped with a compliant Soft-Bubble tactile sensor on non-prehensile manipulation and dense packing tasks, where the robot must infer the physics properties of objects from direct and indirect interactions. Trained on only an average of 30 minutes of real-world interaction data per task, our model can perform online adaptation and make touch-informed predictions. Through extensive evaluations in both long-horizon dynamics prediction and real-world manipulation, our method demonstrates superior effectiveness compared to previous learning-based and physics-based simulation systems.
Read more7/2/2024
0
Tactile Aware Dynamic Obstacle Avoidance in Crowded Environment with Deep Reinforcement Learning
Yung Chuen Ng (Shervina), Qi Wen (Shervina), Lim (Michael), Chun Ye Tan (Michael), Zhen Hao Gan (Michael), Meng Yee (Michael), Chuah
Mobile robots operating in crowded environments require the ability to navigate among humans and surrounding obstacles efficiently while adhering to safety standards and socially compliant mannerisms. This scale of the robot navigation problem may be classified as both a local path planning and trajectory optimization problem. This work presents an array of force sensors that act as a tactile layer to complement the use of a LiDAR for the purpose of inducing awareness of contact with any surrounding objects within immediate vicinity of a mobile robot undetected by LiDARs. By incorporating the tactile layer, the robot can take more risks in its movements and possibly go right up to an obstacle or wall, and gently squeeze past it. In addition, we built up a simulation platform via Pybullet which integrates Robot Operating System (ROS) and reinforcement learning (RL) together. A touch-aware neural network model was trained on it to create an RL-based local path planner for dynamic obstacle avoidance. Our proposed method was demonstrated successfully on an omni-directional mobile robot who was able to navigate in a crowded environment with high agility and versatility in movement, while not being overly sensitive to nearby obstacles-not-in-contact.
Read more6/21/2024
0
Learning Tactile Insertion in the Real World
Daniel Palenicek, Theo Gruner, Tim Schneider, Alina Bohm, Janis Lenz, Inga Pfenning, Eric Kramer, Jan Peters
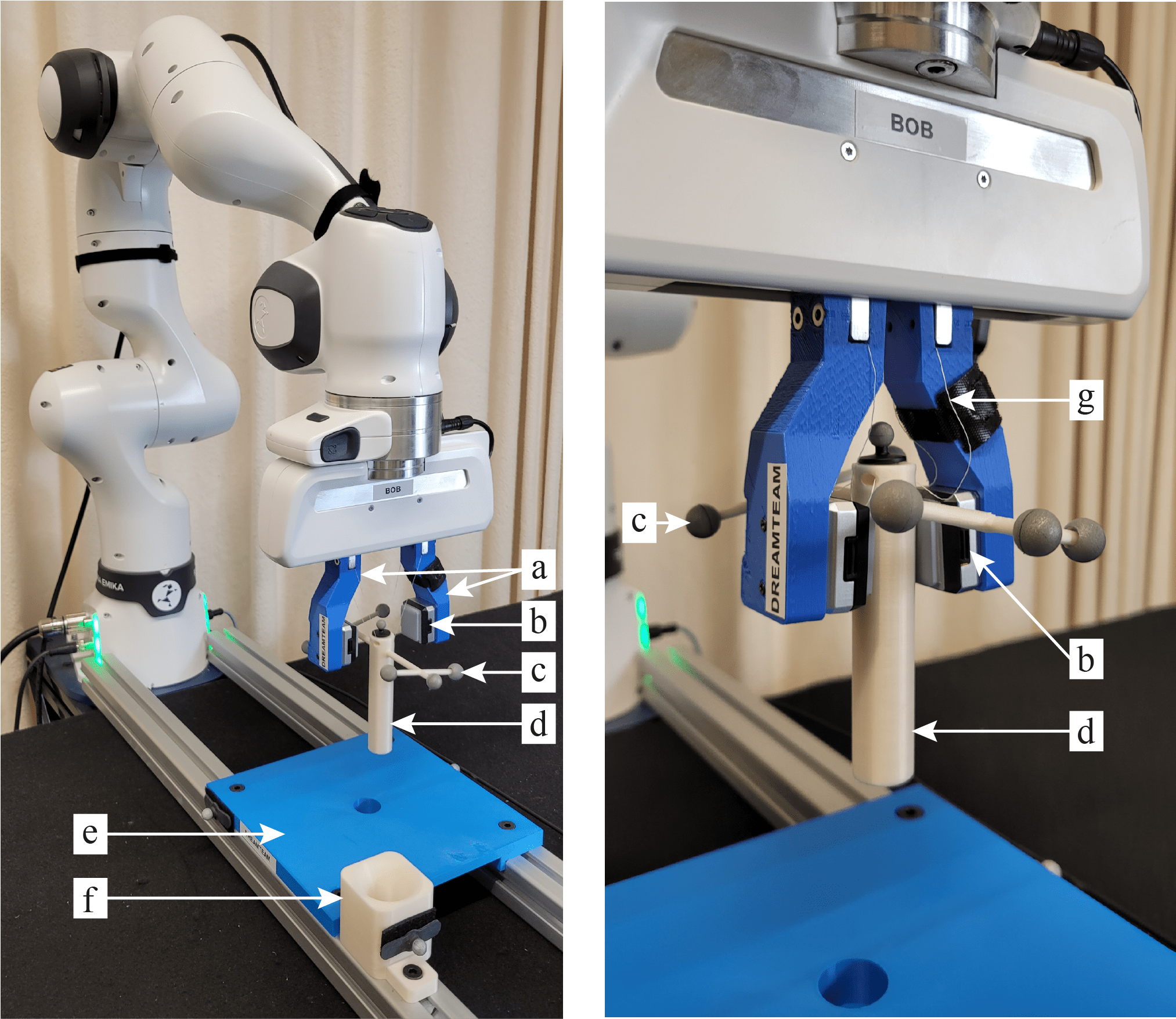
Humans have exceptional tactile sensing capabilities, which they can leverage to solve challenging, partially observable tasks that cannot be solved from visual observation alone. Research in tactile sensing attempts to unlock this new input modality for robots. Lately, these sensors have become cheaper and, thus, widely available. At the same time, the question of how to integrate them into control loops is still an active area of research, with central challenges being partial observability and the contact-rich nature of manipulation tasks. In this study, we propose to use Reinforcement Learning to learn an end-to-end policy, mapping directly from tactile sensor readings to actions. Specifically, we use Dreamer-v3 on a challenging, partially observable robotic insertion task with a Franka Research 3, both in simulation and on a real system. For the real setup, we built a robotic platform capable of resetting itself fully autonomously, allowing for extensive training runs without human supervision. Our preliminary results indicate that Dreamer is capable of utilizing tactile inputs to solve robotic manipulation tasks in simulation and reality. Furthermore, we find that providing the robot with tactile feedback generally improves task performance, though, in our setup, we do not yet include other sensing modalities. In the future, we plan to utilize our platform to evaluate a wide range of other Reinforcement Learning algorithms on tactile tasks.
Read more8/1/2024
🔎
0
New!Dynamic Layer Detection of a Thin Silk Cloth using DenseTact Optical Tactile Sensors
Ankush Kundan Dhawan, Camille Chungyuon, Karina Ting, Monroe Kennedy III
Cloth manipulation is an important aspect of many everyday tasks and remains a significant challenge for robots. While existing research has made strides in tasks like cloth smoothing and folding, many studies struggle with common failure modes (crumpled corners/edges, incorrect grasp configurations) that a preliminary step of cloth layer detection can solve. We present a novel method for classifying the number of grasped cloth layers using a custom gripper equipped with DenseTact 2.0 optical tactile sensors. After grasping a cloth, the gripper performs an anthropomorphic rubbing motion while collecting optical flow, 6-axis wrench, and joint state data. Using this data in a transformer-based network achieves a test accuracy of 98.21% in correctly classifying the number of grasped layers, showing the effectiveness of our dynamic rubbing method. Evaluating different inputs and model architectures highlights the usefulness of using tactile sensor information and a transformer model for this task. A comprehensive dataset of 368 labeled trials was collected and made open-source along with this paper. Our project page is available at https://armlabstanford.github.io/dynamic-cloth-detection.
Read more9/17/2024