Tactile Aware Dynamic Obstacle Avoidance in Crowded Environment with Deep Reinforcement Learning

0
Sign in to get full access
Overview
- This paper presents a deep reinforcement learning approach for dynamic obstacle avoidance in crowded environments using tactile awareness.
- The proposed method aims to enable robots to navigate through cluttered spaces while avoiding collisions with dynamic obstacles in a safe and efficient manner.
- The authors leverage tactile sensors to enhance the robot's perception of its surroundings and incorporate this information into the decision-making process.
Plain English Explanation
In this research, the authors have developed a new way for robots to navigate through busy, crowded environments while avoiding collisions with moving obstacles. They use a technique called deep reinforcement learning, which allows the robot to learn how to navigate by trial and error, similar to how a human might learn a new skill.
The key innovation in this work is the use of tactile sensors, which allow the robot to "feel" its surroundings. By incorporating this tactile information into the robot's decision-making process, the authors show that the robot can more effectively avoid collisions with dynamic obstacles, such as people or other moving objects.
This is important because robots are increasingly being used in crowded, real-world environments, such as hospitals, warehouses, and public spaces. Being able to navigate safely through these environments is crucial for the widespread adoption and effective use of robotics technology.
The authors' approach could have significant implications for a wide range of robotic applications, from autonomous vehicles to assistive robots in healthcare settings. By enabling robots to navigate more safely and efficiently, this research helps to bring us closer to a future where robots can seamlessly integrate with and assist humans in our daily lives.
Technical Explanation
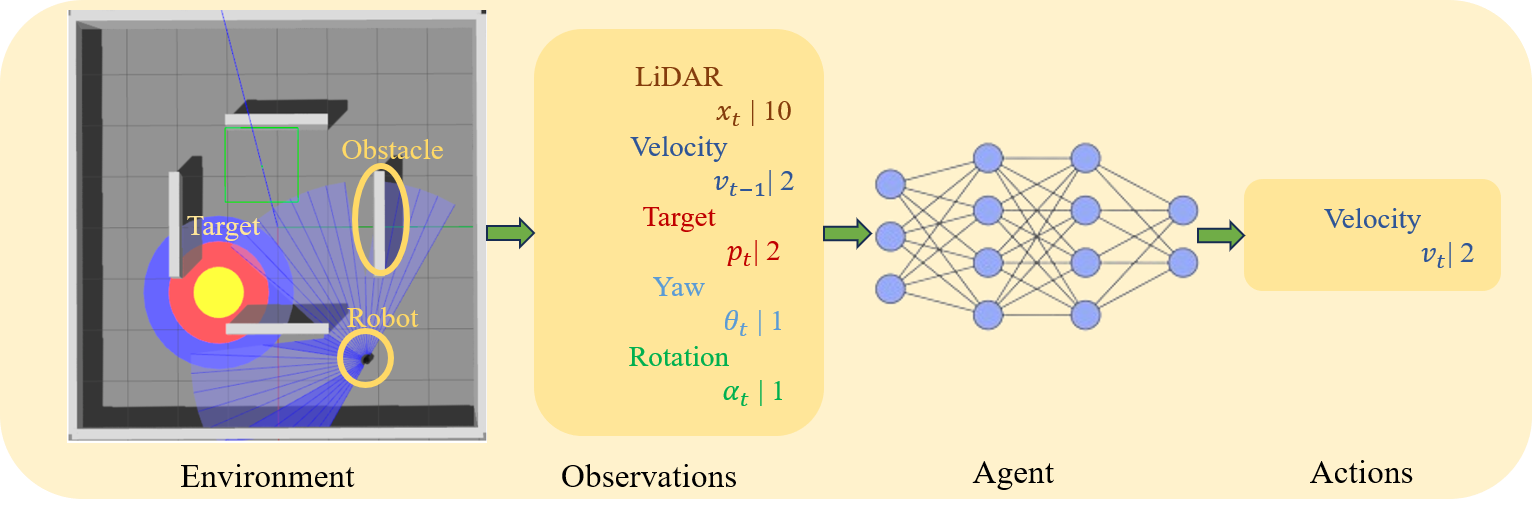
The authors propose a deep reinforcement learning-enhanced PPO (Proximal Policy Optimization) algorithm for dynamic obstacle avoidance in crowded environments. Their approach, called Tactile-Aware Dynamic Obstacle Avoidance (TA-DOA), leverages tactile information to enhance the robot's perception and decision-making capabilities.
The key components of the TA-DOA framework include:
-
Tactile Sensor Integration: The robot is equipped with tactile sensors that provide information about its interactions with the surrounding environment. This tactile data is used as an additional input to the reinforcement learning model.
-
Deep Reinforcement Learning: The authors use a deep reinforcement learning algorithm, specifically an enhanced version of the Proximal Policy Optimization (PPO) algorithm, to train the robot to navigate through the cluttered environment while avoiding collisions with dynamic obstacles.
-
Obstacle Representation: The authors use a structured graph network to represent the dynamic obstacles in the environment, which allows the robot to reason about their movements and plan its own trajectory accordingly.
The authors evaluate their approach in simulation and real-world experiments, demonstrating its effectiveness in navigating through crowded environments with dynamic obstacles. They compare the TA-DOA method to other state-of-the-art approaches and show that the incorporation of tactile awareness leads to improved collision avoidance and overall navigation performance.
Critical Analysis
The authors have provided a comprehensive evaluation of their TA-DOA method, including both simulation and real-world experiments. The results demonstrate the effectiveness of their approach in navigating through cluttered environments with dynamic obstacles.
One potential limitation of the research is the reliance on simulation-based training. While the authors have validated their approach in real-world experiments, it would be valuable to see further testing and deployment in more diverse and challenging real-world scenarios, such as crowded public spaces or industrial settings.
Additionally, the authors could explore the integration of their tactile-aware approach with other navigation techniques, such as simultaneous localization and mapping (SLAM) or path planning, to further enhance the robot's overall navigation capabilities.
Overall, the TA-DOA method represents a promising step forward in improving the safety and efficiency of robot navigation in crowded, dynamic environments. The incorporation of tactile awareness is a novel and important contribution to the field of deep reinforcement learning for robot navigation.
Conclusion
This paper presents a deep reinforcement learning-based approach for dynamic obstacle avoidance in crowded environments, leveraging tactile sensors to enhance the robot's perception and decision-making capabilities. The proposed TA-DOA method demonstrates improved collision avoidance and navigation performance compared to existing techniques, making it a valuable contribution to the field of robotics.
The integration of tactile awareness into the reinforcement learning framework is a key innovation that could lead to more robust and reliable robot navigation in real-world scenarios. As robots continue to play an increasingly important role in our daily lives, this research brings us one step closer to a future where robots can safely and effectively navigate crowded, dynamic environments alongside humans.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Tactile Aware Dynamic Obstacle Avoidance in Crowded Environment with Deep Reinforcement Learning
Yung Chuen Ng (Shervina), Qi Wen (Shervina), Lim (Michael), Chun Ye Tan (Michael), Zhen Hao Gan (Michael), Meng Yee (Michael), Chuah
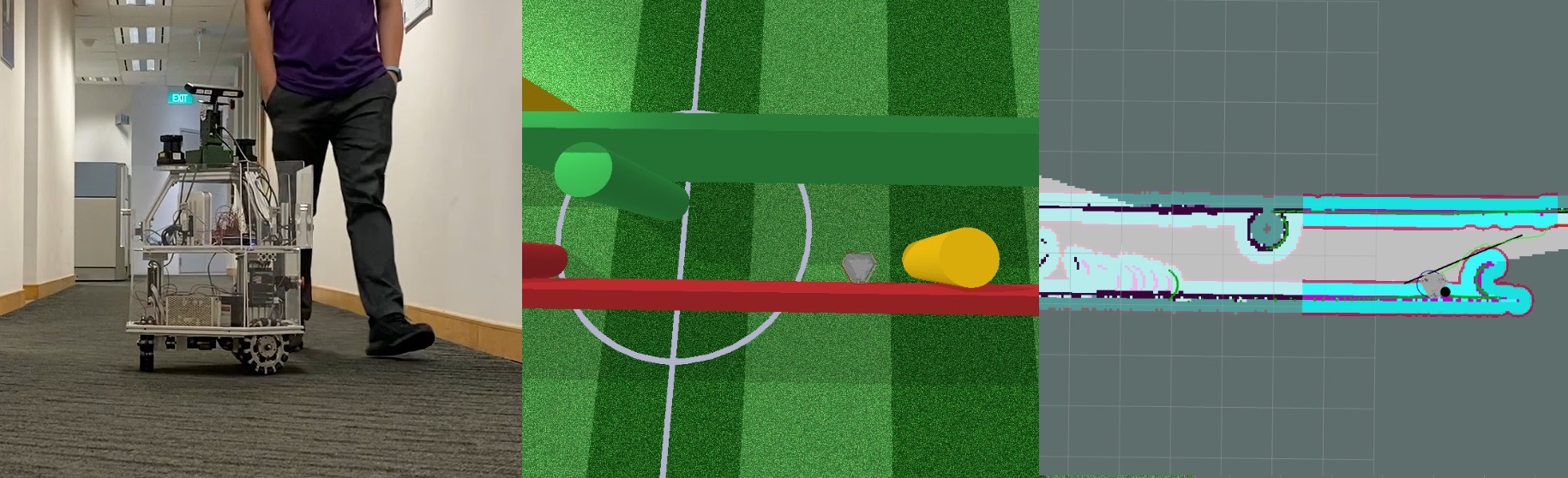
Mobile robots operating in crowded environments require the ability to navigate among humans and surrounding obstacles efficiently while adhering to safety standards and socially compliant mannerisms. This scale of the robot navigation problem may be classified as both a local path planning and trajectory optimization problem. This work presents an array of force sensors that act as a tactile layer to complement the use of a LiDAR for the purpose of inducing awareness of contact with any surrounding objects within immediate vicinity of a mobile robot undetected by LiDARs. By incorporating the tactile layer, the robot can take more risks in its movements and possibly go right up to an obstacle or wall, and gently squeeze past it. In addition, we built up a simulation platform via Pybullet which integrates Robot Operating System (ROS) and reinforcement learning (RL) together. A touch-aware neural network model was trained on it to create an RL-based local path planner for dynamic obstacle avoidance. Our proposed method was demonstrated successfully on an omni-directional mobile robot who was able to navigate in a crowded environment with high agility and versatility in movement, while not being overly sensitive to nearby obstacles-not-in-contact.
Read more6/21/2024

0
RoboPack: Learning Tactile-Informed Dynamics Models for Dense Packing
Bo Ai, Stephen Tian, Haochen Shi, Yixuan Wang, Cheston Tan, Yunzhu Li, Jiajun Wu
Tactile feedback is critical for understanding the dynamics of both rigid and deformable objects in many manipulation tasks, such as non-prehensile manipulation and dense packing. We introduce an approach that combines visual and tactile sensing for robotic manipulation by learning a neural, tactile-informed dynamics model. Our proposed framework, RoboPack, employs a recurrent graph neural network to estimate object states, including particles and object-level latent physics information, from historical visuo-tactile observations and to perform future state predictions. Our tactile-informed dynamics model, learned from real-world data, can solve downstream robotics tasks with model-predictive control. We demonstrate our approach on a real robot equipped with a compliant Soft-Bubble tactile sensor on non-prehensile manipulation and dense packing tasks, where the robot must infer the physics properties of objects from direct and indirect interactions. Trained on only an average of 30 minutes of real-world interaction data per task, our model can perform online adaptation and make touch-informed predictions. Through extensive evaluations in both long-horizon dynamics prediction and real-world manipulation, our method demonstrates superior effectiveness compared to previous learning-based and physics-based simulation systems.
Read more7/2/2024
0
Deep Reinforcement Learning with Enhanced PPO for Safe Mobile Robot Navigation
Hamid Taheri, Seyed Rasoul Hosseini, Mohammad Ali Nekoui
Collision-free motion is essential for mobile robots. Most approaches to collision-free and efficient navigation with wheeled robots require parameter tuning by experts to obtain good navigation behavior. This study investigates the application of deep reinforcement learning to train a mobile robot for autonomous navigation in a complex environment. The robot utilizes LiDAR sensor data and a deep neural network to generate control signals guiding it toward a specified target while avoiding obstacles. We employ two reinforcement learning algorithms in the Gazebo simulation environment: Deep Deterministic Policy Gradient and proximal policy optimization. The study introduces an enhanced neural network structure in the Proximal Policy Optimization algorithm to boost performance, accompanied by a well-designed reward function to improve algorithm efficacy. Experimental results conducted in both obstacle and obstacle-free environments underscore the effectiveness of the proposed approach. This research significantly contributes to the advancement of autonomous robotics in complex environments through the application of deep reinforcement learning.
Read more8/9/2024
0
Robot Navigation with Entity-Based Collision Avoidance using Deep Reinforcement Learning
Yury Kolomeytsev, Dmitry Golembiovsky
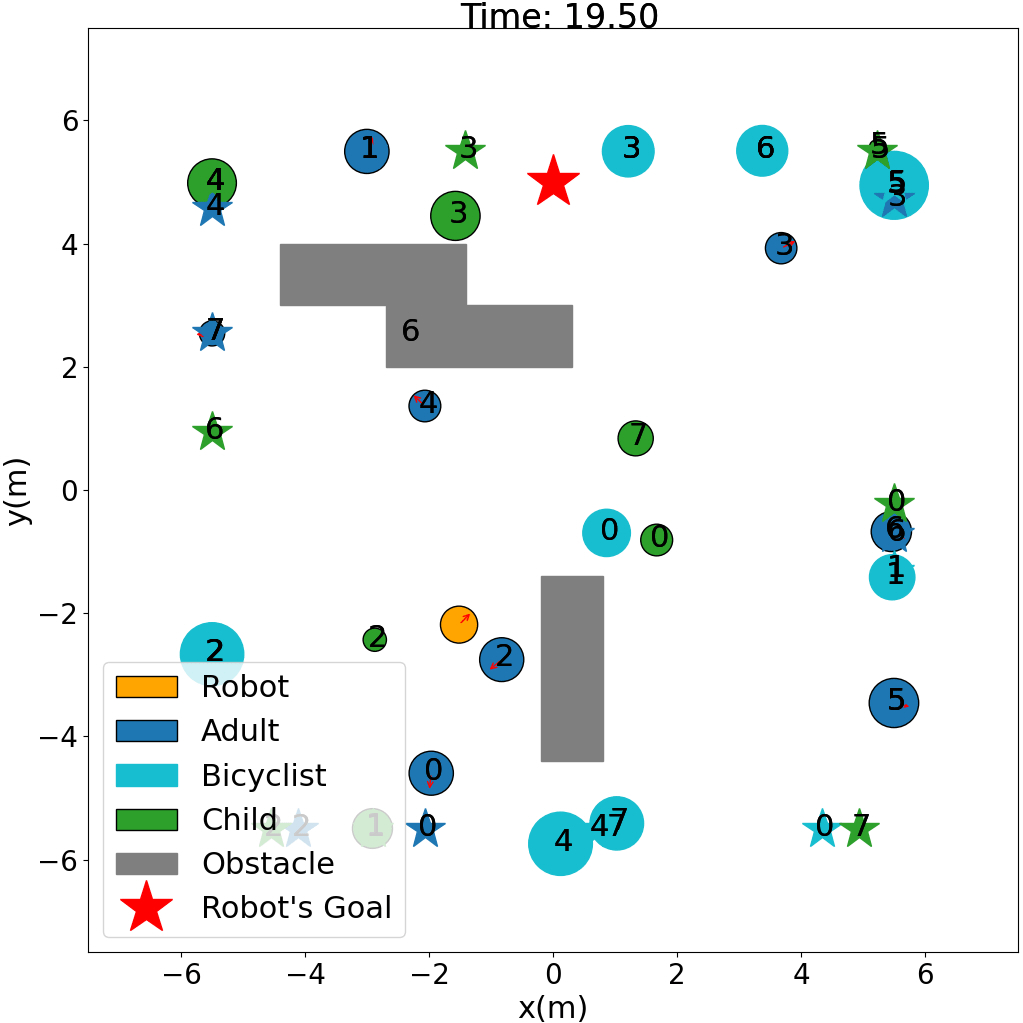
Efficient navigation in dynamic environments is crucial for autonomous robots interacting with various environmental entities, including both moving agents and static obstacles. In this study, we present a novel methodology that enhances the robot's interaction with different types of agents and obstacles based on specific safety requirements. This approach uses information about the entity types, improving collision avoidance and ensuring safer navigation. We introduce a new reward function that penalizes the robot for collisions with different entities such as adults, bicyclists, children, and static obstacles, and additionally encourages the robot's proximity to the goal. It also penalizes the robot for being close to entities, and the safe distance also depends on the entity type. Additionally, we propose an optimized algorithm for training and testing, which significantly accelerates train, validation, and test steps and enables training in complex environments. Comprehensive experiments conducted using simulation demonstrate that our approach consistently outperforms conventional navigation and collision avoidance methods, including state-of-the-art techniques. To sum up, this work contributes to enhancing the safety and efficiency of navigation systems for autonomous robots in dynamic, crowded environments.
Read more8/27/2024