Robotic Exploration through Semantic Topometric Mapping

0

Sign in to get full access
Overview
- This paper presents a novel approach for robotic exploration using semantic topometric mapping.
- The method integrates semantic understanding of the environment with a topometric representation to enable efficient and informed exploration.
- The approach is evaluated through simulations and real-world experiments, demonstrating its effectiveness in navigating complex environments.
Plain English Explanation
The paper describes a new way for robots to explore and map their surroundings. Traditionally, robots have relied on creating detailed 3D maps of their environment. However, this can be computationally intensive and may not provide the high-level understanding needed for efficient exploration.
The researchers' approach combines two key ideas: semantic understanding and topometric mapping. Semantic understanding allows the robot to recognize and categorize different objects and regions in the environment, like "kitchen," "hallway," or "table." Topometric mapping represents the spatial layout of the environment at a more abstract, high-level, rather than a detailed 3D representation.
By integrating these two techniques, the robot can build a "semantic topometric map" that captures both the meaning and structure of the environment. This allows the robot to plan its exploration more strategically, focusing on areas that are likely to be interesting or important, rather than just blindly mapping every nook and cranny.
The paper evaluates this approach through simulations and real-world experiments, showing that it outperforms traditional mapping methods in terms of exploration efficiency and high-level understanding of the environment.
Technical Explanation
The paper proposes a Robotic Exploration through Semantic Topometric Mapping approach that integrates semantic understanding with a topometric representation of the environment.
The key elements of the approach are:
-
Semantic Segmentation: The robot first uses deep learning models to semantically segment the environment, classifying regions into semantic categories like "kitchen," "hallway," or "table."
-
Topometric Mapping: The robot then builds a topometric map, which represents the high-level spatial layout of the environment as a graph-based structure, rather than a detailed 3D reconstruction.
-
Integration: The semantic segmentation and topometric map are combined, creating a "semantic topometric map" that encodes both the meaning and structure of the environment.
-
Exploration: The robot can then use this semantic topometric map to plan efficient exploration strategies, focusing on areas that are likely to be interesting or important based on the semantic information.
The paper evaluates this approach through simulations and real-world experiments, comparing it to traditional mapping techniques. The results demonstrate significant improvements in exploration efficiency and the robot's high-level understanding of the environment.
Critical Analysis
The paper presents a compelling approach that addresses important limitations of traditional robotic mapping techniques. By incorporating semantic understanding, the method allows the robot to build more meaningful and useful representations of the environment.
However, the paper does not deeply discuss the potential limitations or challenges of this approach. For example, the accuracy and reliability of the semantic segmentation model could be a critical factor, and the paper does not explore how errors or uncertainties in this component might impact the overall system performance.
Additionally, the paper focuses primarily on the mapping and exploration capabilities, but does not delve into how this semantic topometric representation could be leveraged for other important robotic tasks, such as manipulation, reasoning, or interaction with the environment.
Further research could also explore how this approach might scale to larger or more complex environments, or how it could be adapted to work with different types of sensors or robot platforms.
Conclusion
This paper presents a novel approach for robotic exploration that combines semantic understanding and topometric mapping. By integrating these two key ideas, the method allows robots to build more meaningful and efficient representations of their environment, enabling them to explore and navigate more effectively.
The results demonstrate the potential of this approach, which could have significant implications for a wide range of robotic applications, from search and rescue to autonomous navigation and beyond. As the field of robotics continues to advance, techniques like this that can bridge the gap between low-level sensor data and high-level environmental understanding will become increasingly important.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Robotic Exploration through Semantic Topometric Mapping
Scott Fredriksson, Akshit Saradagi, George Nikolakopoulos
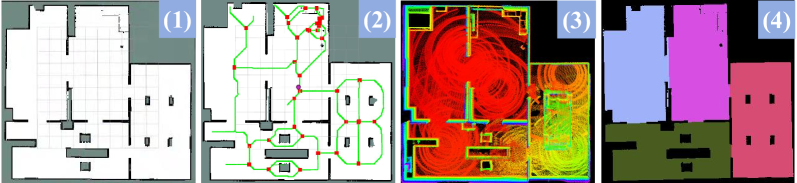
In this article, we introduce a novel strategy for robotic exploration in unknown environments using a semantic topometric map. As it will be presented, the semantic topometric map is generated by segmenting the grid map of the currently explored parts of the environment into regions, such as intersections, pathways, dead-ends, and unexplored frontiers, which constitute the structural semantics of an environment. The proposed exploration strategy leverages metric information of the frontier, such as distance and angle to the frontier, similar to existing frameworks, with the key difference being the additional utilization of structural semantic information, such as properties of the intersections leading to frontiers. The algorithm for generating semantic topometric mapping utilized by the proposed method is lightweight, resulting in the method's online execution being both rapid and computationally efficient. Moreover, the proposed framework can be applied to both structured and unstructured indoor and outdoor environments, which enhances the versatility of the proposed exploration algorithm. We validate our exploration strategy and demonstrate the utility of structural semantics in exploration in two complex indoor environments by utilizing a Turtlebot3 as the robotic agent. Compared to traditional frontier-based methods, our findings indicate that the proposed approach leads to faster exploration and requires less computation time.
Read more6/27/2024
0
Multi-Type Map Construction via Semantics-Aware Autonomous Exploration in Unknown Indoor Environments
Jianfang Mao, Yuheng Xie, Si Chen, Zhixiong Nan, Xiao Wang
This paper proposes a novel semantics-aware autonomous exploration model to handle the long-standing issue: the mainstream RRT (Rapid-exploration Random Tree) based exploration models usually make the mobile robot switch frequently between different regions, leading to the excessively-repeated explorations for the same region. Our proposed semantics-aware model encourages a mobile robot to fully explore the current region before moving to the next region, which is able to avoid excessively-repeated explorations and make the exploration faster. The core idea of semantics-aware autonomous exploration model is optimizing the sampling point selection mechanism and frontier point evaluation function by considering the semantic information of regions. In addition, compared with existing autonomous exploration methods that usually construct the single-type or 2-3 types of maps, our model allows to construct four kinds of maps including point cloud map, occupancy grid map, topological map, and semantic map. To test the performance of our model, we conducted experiments in three simulated environments. The experiment results demonstrate that compared to Improved RRT, our model achieved 33.0% exploration time reduction and 39.3% exploration trajectory length reduction when maintaining >98% exploration rate.
Read more4/9/2024

0
GRID-FAST: A Grid-based Intersection Detection for Fast Semantic Topometric Mapping
Scott Fredriksson, Akshit Saradagi, George Nikolakopoulos
This article introduces a novel approach to constructing a topometric map that allows for efficient navigation and decision-making in mobile robotics applications. The method generates the topometric map from a 2D grid-based map. The topometric map segments areas of the input map into different structural-semantic classes: intersections, pathways, dead ends, and pathways leading to unexplored areas. This method is grounded in a new technique for intersection detection that identifies the area and the openings of intersections in a semantically meaningful way. The framework introduces two levels of pre-filtering with minimal computational cost to eliminate small openings and objects from the map which are unimportant in the context of high-level map segmentation and decision making. The topological map generated by GRID-FAST enables fast navigation in large-scale environments, and the structural semantics can aid in mission planning, autonomous exploration, and human-to-robot cooperation. The efficacy of the proposed method is demonstrated through validation on real maps gathered from robotic experiments: 1) a structured indoor environment, 2) an unstructured cave-like subterranean environment, and 3) a large-scale outdoor environment, which comprises pathways, buildings, and scattered objects. Additionally, the proposed framework has been compared with state-of-the-art topological mapping solutions and is able to produce a topometric and topological map with up to blue92% fewer nodes than the next best solution.
Read more6/18/2024

0
Active Semantic Mapping and Pose Graph Spectral Analysis for Robot Exploration
Rongge Zhang, Haechan Mark Bong, Giovanni Beltrame
Exploration in unknown and unstructured environments is a pivotal requirement for robotic applications. A robot's exploration behavior can be inherently affected by the performance of its Simultaneous Localization and Mapping (SLAM) subsystem, although SLAM and exploration are generally studied separately. In this paper, we formulate exploration as an active mapping problem and extend it with semantic information. We introduce a novel active metric-semantic SLAM approach, leveraging recent research advances in information theory and spectral graph theory: we combine semantic mutual information and the connectivity metrics of the underlying pose graph of the SLAM subsystem. We use the resulting utility function to evaluate different trajectories to select the most favorable strategy during exploration. Exploration and SLAM metrics are analyzed in experiments. Running our algorithm on the Habitat dataset, we show that, while maintaining efficiency close to the state-of-the-art exploration methods, our approach effectively increases the performance of metric-semantic SLAM with a 21% reduction in average map error and a 9% improvement in average semantic classification accuracy.
Read more9/4/2024