Multi-Type Map Construction via Semantics-Aware Autonomous Exploration in Unknown Indoor Environments
2404.04879
0
0
Abstract
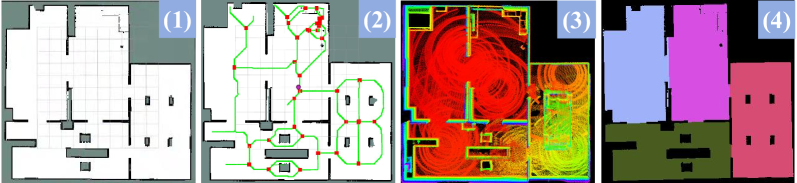
This paper proposes a novel semantics-aware autonomous exploration model to handle the long-standing issue: the mainstream RRT (Rapid-exploration Random Tree) based exploration models usually make the mobile robot switch frequently between different regions, leading to the excessively-repeated explorations for the same region. Our proposed semantics-aware model encourages a mobile robot to fully explore the current region before moving to the next region, which is able to avoid excessively-repeated explorations and make the exploration faster. The core idea of semantics-aware autonomous exploration model is optimizing the sampling point selection mechanism and frontier point evaluation function by considering the semantic information of regions. In addition, compared with existing autonomous exploration methods that usually construct the single-type or 2-3 types of maps, our model allows to construct four kinds of maps including point cloud map, occupancy grid map, topological map, and semantic map. To test the performance of our model, we conducted experiments in three simulated environments. The experiment results demonstrate that compared to Improved RRT, our model achieved 33.0% exploration time reduction and 39.3% exploration trajectory length reduction when maintaining >98% exploration rate.
Create account to get full access
Overview
- This paper presents a system for constructing multi-type maps of unknown indoor environments through semantics-aware autonomous exploration.
- The system uses a robot equipped with sensors to navigate and gather information about its surroundings, which it then uses to build a comprehensive map.
- The key innovation is the incorporation of semantic information, which allows the robot to identify and categorize different types of objects and features in the environment.
Plain English Explanation
The researchers have developed a robot that can explore and map unknown indoor spaces on its own. Unlike traditional mapping systems that just create general 3D models, this robot's mapping also includes information about the meaning and purpose of the different elements it encounters.
For example, the robot can identify doorways, furniture, electrical outlets, and other specific objects or features, and categorize them accordingly. This "semantic" understanding allows the robot to build a more detailed and useful map of the environment.
The robot uses its onboard sensors, like cameras and laser scanners, to perceive its surroundings as it moves around. It then processes this sensor data to construct a comprehensive 3D map, while also classifying the different elements it finds. The end result is a multi-layered map that not only shows the physical layout, but also provides information about the types of things present.
This kind of semantically-aware mapping could be very useful for applications like home robots, search-and-rescue operations, or autonomous vehicles navigating complex indoor spaces. By understanding the meaning and function of the environment, the robot can make smarter decisions and interact with its surroundings in more natural and effective ways.
Technical Explanation
The core of the system is a Quad-Query based Interpretable Neural Motion Planning architecture that allows the robot to plan motion and explore its environment. This is combined with a Under Canopy Navigation Using Aerial LiDAR Maps approach for handling sensor data and constructing the 3D map.
The key innovation is the incorporation of semantic information, which is achieved through a Probabilistically Informed Robot Object Search in Multiple Regions module. This module uses deep learning to classify the different objects and features detected by the robot's sensors, allowing the system to build a semantically-annotated map.
The exploration and mapping process is guided by a Roadmaps, Gaps, and Controllers: Achieving Efficiency in Planning strategy, which prioritizes efficient coverage of the unknown space while also maintaining semantic awareness.
The final output is a Loss SLAM: Lightweight Open-Set Semantic Simultaneous map that represents the environment in both geometric and semantic terms.
Critical Analysis
The paper presents a compelling approach to autonomous exploration and mapping that goes beyond traditional SLAM techniques by incorporating semantic understanding. This could be a significant advancement for applications that require robots to interact with and make sense of complex indoor environments.
However, the authors acknowledge that their system has limitations in terms of scalability and the ability to handle highly dynamic or cluttered spaces. Additionally, the reliance on deep learning models for semantic classification introduces potential vulnerabilities, such as susceptibility to adversarial attacks or biases in the training data.
Further research could explore ways to improve the robustness and adaptability of the semantic mapping capabilities, perhaps by incorporating other sensing modalities or by developing more generalizable learning algorithms. Integrating the system with advanced planning and reasoning capabilities could also enhance its practical utility in real-world scenarios.
Conclusion
This paper presents an innovative approach to autonomous exploration and mapping that leverages semantic information to construct detailed and meaningful representations of unknown indoor environments. The ability to classify and categorize different elements of the surroundings could have significant implications for a wide range of applications, from home robotics to search-and-rescue operations.
While the current system has some limitations, the underlying ideas and techniques demonstrate the potential for robots to develop a deeper understanding of their environments, which could lead to more intuitive and effective interactions. As the field of robotics and artificial intelligence continues to evolve, research like this could pave the way for increasingly capable and intelligent autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Robotic Exploration through Semantic Topometric Mapping
Scott Fredriksson, Akshit Saradagi, George Nikolakopoulos
0
0
In this article, we introduce a novel strategy for robotic exploration in unknown environments using a semantic topometric map. As it will be presented, the semantic topometric map is generated by segmenting the grid map of the currently explored parts of the environment into regions, such as intersections, pathways, dead-ends, and unexplored frontiers, which constitute the structural semantics of an environment. The proposed exploration strategy leverages metric information of the frontier, such as distance and angle to the frontier, similar to existing frameworks, with the key difference being the additional utilization of structural semantic information, such as properties of the intersections leading to frontiers. The algorithm for generating semantic topometric mapping utilized by the proposed method is lightweight, resulting in the method's online execution being both rapid and computationally efficient. Moreover, the proposed framework can be applied to both structured and unstructured indoor and outdoor environments, which enhances the versatility of the proposed exploration algorithm. We validate our exploration strategy and demonstrate the utility of structural semantics in exploration in two complex indoor environments by utilizing a Turtlebot3 as the robotic agent. Compared to traditional frontier-based methods, our findings indicate that the proposed approach leads to faster exploration and requires less computation time.
6/27/2024
Mapping High-level Semantic Regions in Indoor Environments without Object Recognition
Roberto Bigazzi, Lorenzo Baraldi, Shreyas Kousik, Rita Cucchiara, Marco Pavone
0
0
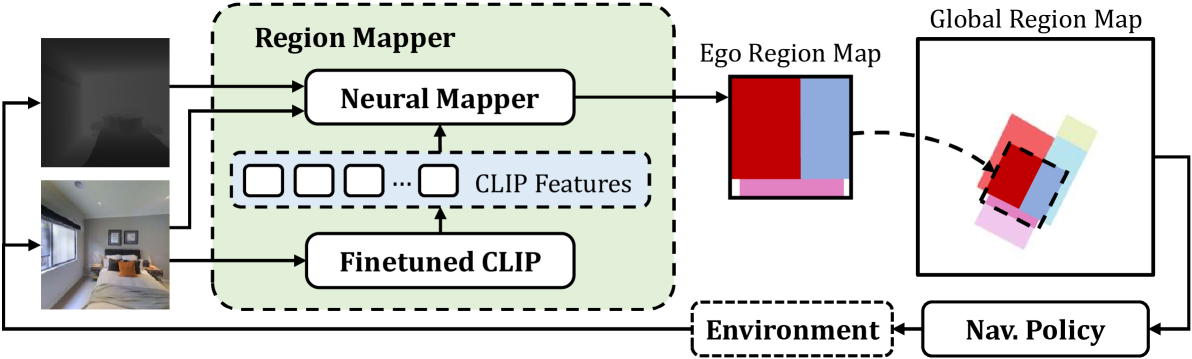
Robots require a semantic understanding of their surroundings to operate in an efficient and explainable way in human environments. In the literature, there has been an extensive focus on object labeling and exhaustive scene graph generation; less effort has been focused on the task of purely identifying and mapping large semantic regions. The present work proposes a method for semantic region mapping via embodied navigation in indoor environments, generating a high-level representation of the knowledge of the agent. To enable region identification, the method uses a vision-to-language model to provide scene information for mapping. By projecting egocentric scene understanding into the global frame, the proposed method generates a semantic map as a distribution over possible region labels at each location. This mapping procedure is paired with a trained navigation policy to enable autonomous map generation. The proposed method significantly outperforms a variety of baselines, including an object-based system and a pretrained scene classifier, in experiments in a photorealistic simulator.
4/16/2024

Monocular Localization with Semantics Map for Autonomous Vehicles
Jixiang Wan, Xudong Zhang, Shuzhou Dong, Yuwei Zhang, Yuchen Yang, Ruoxi Wu, Ye Jiang, Jijunnan Li, Jinquan Lin, Ming Yang
0
0
Accurate and robust localization remains a significant challenge for autonomous vehicles. The cost of sensors and limitations in local computational efficiency make it difficult to scale to large commercial applications. Traditional vision-based approaches focus on texture features that are susceptible to changes in lighting, season, perspective, and appearance. Additionally, the large storage size of maps with descriptors and complex optimization processes hinder system performance. To balance efficiency and accuracy, we propose a novel lightweight visual semantic localization algorithm that employs stable semantic features instead of low-level texture features. First, semantic maps are constructed offline by detecting semantic objects, such as ground markers, lane lines, and poles, using cameras or LiDAR sensors. Then, online visual localization is performed through data association of semantic features and map objects. We evaluated our proposed localization framework in the publicly available KAIST Urban dataset and in scenarios recorded by ourselves. The experimental results demonstrate that our method is a reliable and practical localization solution in various autonomous driving localization tasks.
6/7/2024
🔎
New!Graph-based SLAM-Aware Exploration with Prior Topo-Metric Information
Ruofei Bai, Hongliang Guo, Wei-Yun Yau, Lihua Xie
0
0
Autonomous exploration requires a robot to explore an unknown environment while constructing an accurate map using Simultaneous Localization and Mapping (SLAM) techniques. Without prior information, the exploration performance is usually conservative due to the limited planning horizon. This paper exploits prior information about the environment, represented as a topo-metric graph, to benefit both the exploration efficiency and the pose graph reliability in SLAM. Based on the relationship between pose graph reliability and graph topology, we formulate a SLAM-aware path planning problem over the prior graph, which finds a fast exploration path enhanced with the globally informative loop-closing actions to stabilize the SLAM pose graph. A greedy algorithm is proposed to solve the problem, where theoretical thresholds are derived to significantly prune non-optimal loop-closing actions, without affecting the potential informative ones. Furthermore, we incorporate the proposed planner into a hierarchical exploration framework, with flexible features including path replanning, and online prior graph update that adds additional information to the prior graph. Simulation and real-world experiments indicate that the proposed method can reliably achieve higher mapping accuracy than compared methods when exploring environments with rich topologies, while maintaining comparable exploration efficiency. Our method has been open-sourced on GitHub.
7/2/2024