Robotic warehousing operations: a learn-then-optimize approach to large-scale neighborhood search

0

Sign in to get full access
Overview
- Summarizes the key ideas and significance of a technical paper in plain language
- Provides a detailed technical explanation of the paper's contents
- Offers a critical analysis of the research, including potential limitations and areas for further study
- Concludes with the main takeaways and implications of the work
Plain English Explanation
This paper presents a novel approach for optimizing task design and scheduling in warehouse automation systems that face congestion and restricted workloads. The researchers developed a model to address these challenges, aiming to improve the efficiency and productivity of warehouse operations.
The paper begins with a literature review of existing research on warehouse automation and task scheduling. It then introduces the researchers' task design and scheduling model, which takes into account factors like congestion and workload restrictions to optimize decision-making.
The model leverages mathematical optimization techniques to find the best ways to assign tasks to robots and schedule their movements in the warehouse. This helps minimize delays, bottlenecks, and other inefficiencies that can arise from congestion and limited resources.
Through experiments and simulations, the researchers demonstrate that their approach can lead to significant improvements in throughput, cost savings, and other key performance metrics compared to traditional warehouse management systems.
Technical Explanation
The paper first provides a literature review of prior work on warehouse automation, task scheduling, and related topics. This helps contextualize the researchers' proposed approach and highlight the need for new solutions.
The core of the paper is the task design and scheduling model developed by the authors. This model takes into account two key challenges faced by many automated warehouse systems:
- Congestion: The movement of multiple robots and equipment in a confined space can lead to bottlenecks and delays.
- Restricted workload: Warehouses often have limits on factors like the number of robots, storage capacity, or worker availability, which constrain the system's overall throughput.
To address these issues, the researchers formulated the task scheduling problem as a mathematical optimization problem. They used techniques like mixed-integer programming to find the optimal assignments of tasks to robots and the best sequences of robot movements.
The model aims to minimize factors like travel time, waiting time, and resource utilization in order to maximize the overall productivity and efficiency of the warehouse operations.
The researchers then conducted experiments to evaluate the performance of their approach compared to other scheduling methods. Their results showed significant improvements in key metrics like throughput, cost savings, and robot utilization.
Critical Analysis
The paper presents a compelling approach to optimizing task design and scheduling in automated warehouse systems. The researchers have identified real-world challenges facing these systems, such as congestion and limited resources, and developed a model to address them.
One potential limitation of the research is the reliance on simulation-based experiments. While the results are promising, it would be valuable to see how the model performs in real-world warehouse deployments with all the complexities and uncertainties involved.
Additionally, the paper does not delve deeply into the computational complexity and scalability of the optimization algorithms used. As warehouse operations continue to grow in scale and complexity, these factors will be crucial for implementing the model in large-scale, high-throughput facilities.
Further research could also explore incorporating additional real-world constraints and objectives, such as energy consumption, worker safety, or environmental impact, into the optimization framework. This could help make the model more comprehensive and applicable to a wider range of warehouse scenarios.
Conclusion
This paper presents a promising approach for optimizing task design and scheduling in automated warehouse systems. By accounting for congestion and restricted workloads, the researchers' model can help improve the efficiency, productivity, and cost-effectiveness of warehouse operations.
The results demonstrate the potential for significant performance improvements over traditional scheduling methods. While further research is needed to validate the model in real-world settings and address scalability concerns, this work represents an important step towards more intelligent and adaptive warehouse automation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Robotic warehousing operations: a learn-then-optimize approach to large-scale neighborhood search
Cynthia Barnhart, Alexandre Jacquillat, Alexandria Schmid
The rapid deployment of robotics technologies requires dedicated optimization algorithms to manage large fleets of autonomous agents. This paper supports robotic parts-to-picker operations in warehousing by optimizing order-workstation assignments, item-pod assignments and the schedule of order fulfillment at workstations. The model maximizes throughput, while managing human workload at the workstations and congestion in the facility. We solve it via large-scale neighborhood search, with a novel learn-then-optimize approach to subproblem generation. The algorithm relies on an offline machine learning procedure to predict objective improvements based on subproblem features, and an online optimization model to generate a new subproblem at each iteration. In collaboration with Amazon Robotics, we show that our model and algorithm generate much stronger solutions for practical problems than state-of-the-art approaches. In particular, our solution enhances the utilization of robotic fleets by coordinating robotic tasks for human operators to pick multiple items at once, and by coordinating robotic routes to avoid congestion in the facility.
Read more9/2/2024
➖
0
Optimizing Automated Picking Systems in Warehouse Robots Using Machine Learning
Keqin Li, Jin Wang, Xubo Wu, Xirui Peng, Runmian Chang, Xiaoyu Deng, Yiwen Kang, Yue Yang, Fanghao Ni, Bo Hong
With the rapid growth of global e-commerce, the demand for automation in the logistics industry is increasing. This study focuses on automated picking systems in warehouses, utilizing deep learning and reinforcement learning technologies to enhance picking efficiency and accuracy while reducing system failure rates. Through empirical analysis, we demonstrate the effectiveness of these technologies in improving robot picking performance and adaptability to complex environments. The results show that the integrated machine learning model significantly outperforms traditional methods, effectively addressing the challenges of peak order processing, reducing operational errors, and improving overall logistics efficiency. Additionally, by analyzing environmental factors, this study further optimizes system design to ensure efficient and stable operation under variable conditions. This research not only provides innovative solutions for logistics automation but also offers a theoretical and empirical foundation for future technological development and application.
Read more8/30/2024
🏅
0
Scalable Multi-Agent Reinforcement Learning for Warehouse Logistics with Robotic and Human Co-Workers
Aleksandar Krnjaic, Raul D. Steleac, Jonathan D. Thomas, Georgios Papoudakis, Lukas Schafer, Andrew Wing Keung To, Kuan-Ho Lao, Murat Cubuktepe, Matthew Haley, Peter Borsting, Stefano V. Albrecht
We consider a warehouse in which dozens of mobile robots and human pickers work together to collect and deliver items within the warehouse. The fundamental problem we tackle, called the order-picking problem, is how these worker agents must coordinate their movement and actions in the warehouse to maximise performance in this task. Established industry methods using heuristic approaches require large engineering efforts to optimise for innately variable warehouse configurations. In contrast, multi-agent reinforcement learning (MARL) can be flexibly applied to diverse warehouse configurations (e.g. size, layout, number/types of workers, item replenishment frequency), and different types of order-picking paradigms (e.g. Goods-to-Person and Person-to-Goods), as the agents can learn how to cooperate optimally through experience. We develop hierarchical MARL algorithms in which a manager agent assigns goals to worker agents, and the policies of the manager and workers are co-trained toward maximising a global objective (e.g. pick rate). Our hierarchical algorithms achieve significant gains in sample efficiency over baseline MARL algorithms and overall pick rates over multiple established industry heuristics in a diverse set of warehouse configurations and different order-picking paradigms.
Read more9/2/2024
0
Learning Efficient and Fair Policies for Uncertainty-Aware Collaborative Human-Robot Order Picking
Igor G. Smit, Zaharah Bukhsh, Mykola Pechenizkiy, Kostas Alogariastos, Kasper Hendriks, Yingqian Zhang
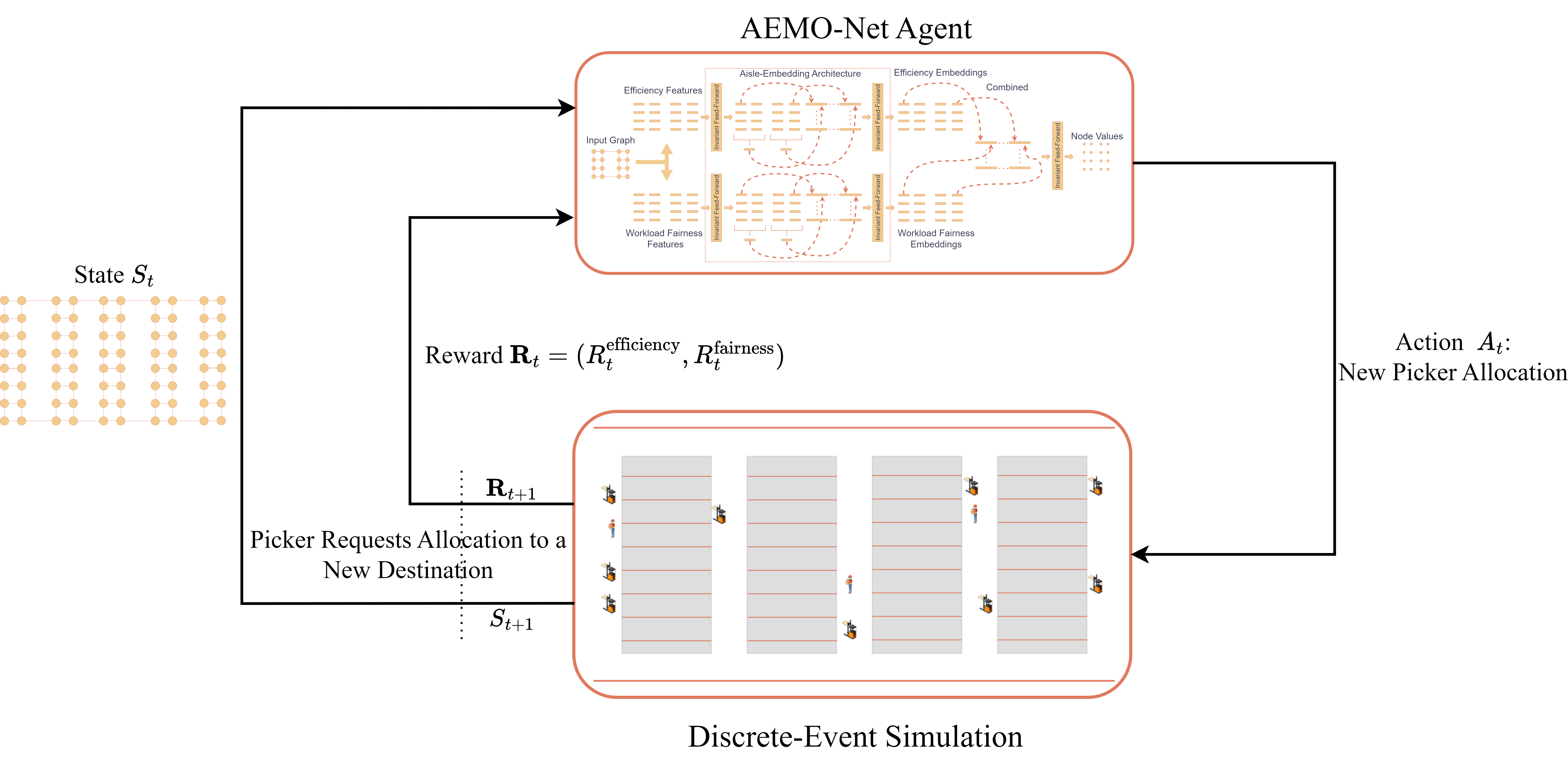
In collaborative human-robot order picking systems, human pickers and Autonomous Mobile Robots (AMRs) travel independently through a warehouse and meet at pick locations where pickers load items onto the AMRs. In this paper, we consider an optimization problem in such systems where we allocate pickers to AMRs in a stochastic environment. We propose a novel multi-objective Deep Reinforcement Learning (DRL) approach to learn effective allocation policies to maximize pick efficiency while also aiming to improve workload fairness amongst human pickers. In our approach, we model the warehouse states using a graph, and define a neural network architecture that captures regional information and effectively extracts representations related to efficiency and workload. We develop a discrete-event simulation model, which we use to train and evaluate the proposed DRL approach. In the experiments, we demonstrate that our approach can find non-dominated policy sets that outline good trade-offs between fairness and efficiency objectives. The trained policies outperform the benchmarks in terms of both efficiency and fairness. Moreover, they show good transferability properties when tested on scenarios with different warehouse sizes. The implementation of the simulation model, proposed approach, and experiments are published.
Read more4/15/2024