Robust Control using Control Lyapunov Function and Hamilton-Jacobi Reachability
2404.05625
0
0

Abstract
The paper presents a robust control technique that combines the Control Lyapunov function and Hamilton-Jacobi Reachability to compute a controller and its Region of Attraction (ROA). The Control Lyapunov function uses a linear system model with an assumed additive uncertainty to calculate a control gain and the level sets of the ROA as a function of the uncertainty. Next, Hamilton-Jacobi reachability uses the nonlinear model with the modeled uncertainty, which need not be additive, to compute the backward reachable set (BRS). Finally, by juxtaposing the level sets of the ROA with BRS, we can calculate the worst-case additive disturbance and the ROA of the nonlinear model. We illustrate our approach on a 2D quadcopter tracking trajectory and a 2D quadcopter with height and velocity regulation in simulation.
Create account to get full access
Overview
- This paper presents a robust control approach that combines Control Lyapunov Functions (CLFs) and Hamilton-Jacobi (HJ) reachability analysis.
- The proposed method aims to provide guaranteed stability and safety for nonlinear systems in the presence of disturbances and uncertainties.
- The authors demonstrate the effectiveness of their approach through simulations and comparison to other robust control techniques.
Plain English Explanation
The paper discusses a new way to control complex systems, like robots or vehicles, that have to operate in uncertain or changing environments. Traditional control methods can struggle with this, as they may not be able to guarantee the system will stay stable and safe.
The authors' approach combines two powerful mathematical tools - Control Lyapunov Functions (CLFs) and Hamilton-Jacobi (HJ) reachability analysis. CLFs help ensure the system will converge to a desired state, even with disturbances. HJ reachability analysis identifies the set of states the system can safely reach, accounting for uncertainties.
By using these techniques together, the authors show they can design a control system that is both stable and safe, even in the face of unpredictable conditions. This could be very useful for applications like self-driving cars, robotic surgery, or industrial automation, where safety and reliability are critical.
Technical Explanation
The paper proposes a robust control framework that integrates Control Lyapunov Functions (CLFs) and Hamilton-Jacobi (HJ) reachability analysis. CLFs provide a systematic way to design stabilizing controllers, while HJ reachability can characterize the set of safe states the system can reach.
The authors develop a Model Predictive Control (MPC) scheme that combines these two approaches. At each time step, the controller solves an optimization problem to find the input that minimizes a cost function while satisfying both stability constraints from the CLF and safety constraints from the HJ reachability analysis.
The key technical contributions include:
- Formulating the combined CLF and HJ reachability constraints within the MPC optimization problem.
- Developing a method to synthesize a control Lyapunov value function that provides robust stability guarantees.
- Demonstrating the effectiveness of the approach through simulations of nonlinear systems subject to disturbances and uncertainties.
Critical Analysis
The paper presents a promising approach for robust control of nonlinear systems, but there are some potential limitations and areas for further research:
- The method relies on the ability to accurately model the system dynamics and disturbances, which may be challenging for complex real-world systems.
- The computational complexity of solving the MPC optimization problem, especially when incorporating the HJ reachability constraints, could limit the applicability to systems with fast dynamics.
- The paper only considers disturbances and uncertainties within a bounded set, and it is not clear how the approach would handle more unbounded or adversarial disturbances.
- Further research is needed to extend this framework to distributed or decentralized control settings, which are common in many applications.
Overall, the authors have made an important contribution to the field of robust control, but there are still opportunities to improve the scalability, flexibility, and real-world applicability of the proposed techniques.
Conclusion
This paper presents a novel robust control approach that combines Control Lyapunov Functions and Hamilton-Jacobi reachability analysis within a Model Predictive Control framework. The authors demonstrate that this integrated approach can provide guaranteed stability and safety for nonlinear systems subject to disturbances and uncertainties.
The proposed method could have significant implications for a wide range of applications, from autonomous vehicles and robotics to industrial automation and medical devices, where reliable and safe control is of utmost importance. While the technique has some limitations, the authors have made an important step forward in addressing the challenging problem of robust control for complex, real-world systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Hamilton-Jacobi Reachability Analysis for Hybrid Systems with Controlled and Forced Transitions
Javier Borquez, Shuang Peng, Yiyu Chen, Quan Nguyen, Somil Bansal
0
0
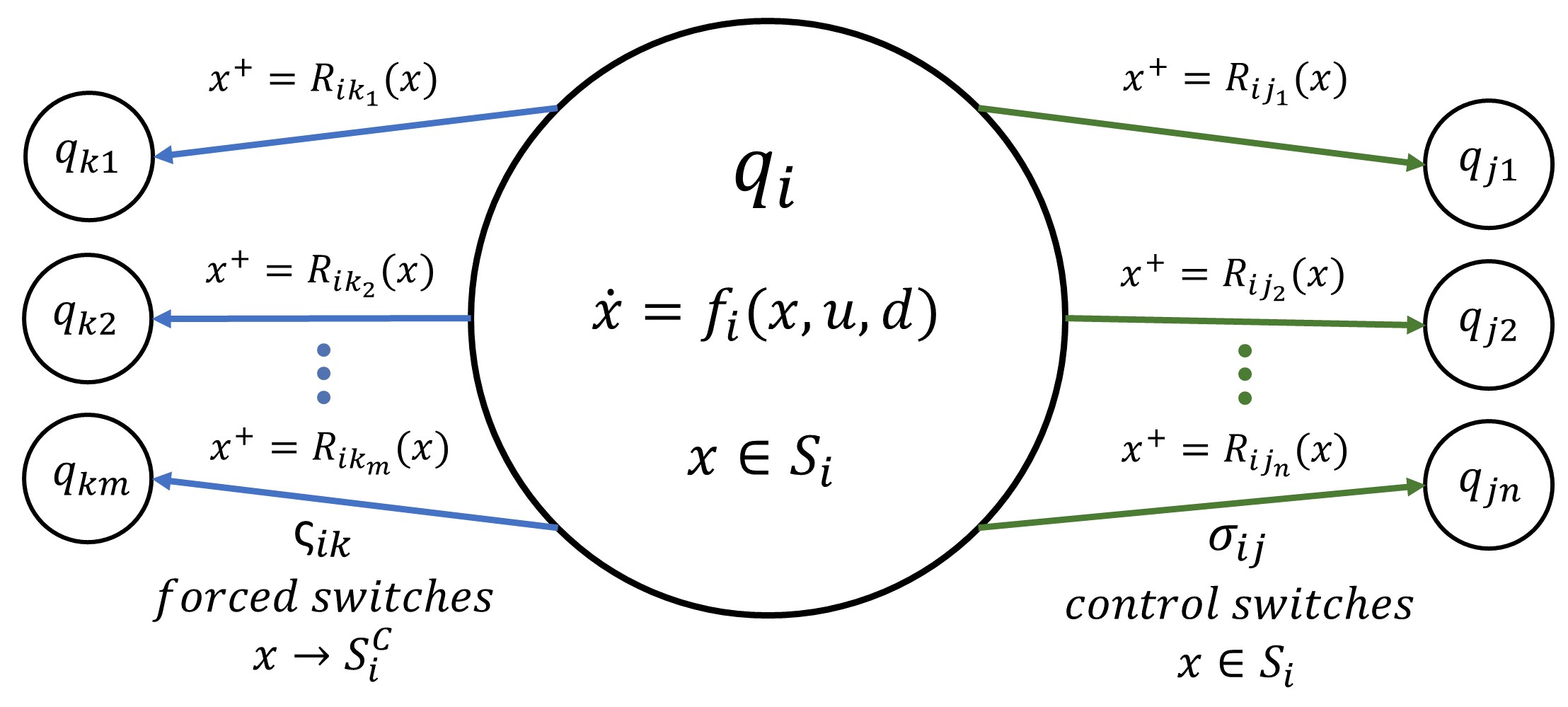
Hybrid dynamical systems with nonlinear dynamics are one of the most general modeling tools for representing robotic systems, especially contact-rich systems. However, providing guarantees regarding the safety or performance of nonlinear hybrid systems remains a challenging problem because it requires simultaneous reasoning about continuous state evolution and discrete mode switching. In this work, we address this problem by extending classical Hamilton-Jacobi (HJ) reachability analysis, a formal verification method for continuous-time nonlinear dynamical systems, to hybrid dynamical systems. We characterize the reachable sets for hybrid systems through a generalized value function defined over discrete and continuous states of the hybrid system. We also provide a numerical algorithm to compute this value function and obtain the reachable set. Our framework can compute reachable sets for hybrid systems consisting of multiple discrete modes, each with its own set of nonlinear continuous dynamics, discrete transitions that can be directly commanded or forced by a discrete control input, while still accounting for control bounds and adversarial disturbances in the state evolution. Along with the reachable set, the proposed framework also provides an optimal continuous and discrete controller to ensure system safety. We demonstrate our framework in several simulation case studies, as well as on a real-world testbed to solve the optimal mode planning problem for a quadruped with multiple gaits.
6/26/2024
Lyapunov-stable Neural Control for State and Output Feedback: A Novel Formulation for Efficient Synthesis and Verification
Lujie Yang, Hongkai Dai, Zhouxing Shi, Cho-Jui Hsieh, Russ Tedrake, Huan Zhang
0
0
Learning-based neural network (NN) control policies have shown impressive empirical performance in a wide range of tasks in robotics and control. However, formal (Lyapunov) stability guarantees over the region-of-attraction (ROA) for NN controllers with nonlinear dynamical systems are challenging to obtain, and most existing approaches rely on expensive solvers such as sums-of-squares (SOS), mixed-integer programming (MIP), or satisfiability modulo theories (SMT). In this paper, we demonstrate a new framework for learning NN controllers together with Lyapunov certificates using fast empirical falsification and strategic regularizations. We propose a novel formulation that defines a larger verifiable region-of-attraction (ROA) than shown in the literature, and refines the conventional restrictive constraints on Lyapunov derivatives to focus only on certifiable ROAs. The Lyapunov condition is rigorously verified post-hoc using branch-and-bound with scalable linear bound propagation-based NN verification techniques. The approach is efficient and flexible, and the full training and verification procedure is accelerated on GPUs without relying on expensive solvers for SOS, MIP, nor SMT. The flexibility and efficiency of our framework allow us to demonstrate Lyapunov-stable output feedback control with synthesized NN-based controllers and NN-based observers with formal stability guarantees, for the first time in literature. Source code at https://github.com/Verified-Intelligence/Lyapunov_Stable_NN_Controllers
6/6/2024
👁️
Discovering Closed-Loop Failures of Vision-Based Controllers via Reachability Analysis
Kaustav Chakraborty, Somil Bansal
0
0
Machine learning driven image-based controllers allow robotic systems to take intelligent actions based on the visual feedback from their environment. Understanding when these controllers might lead to system safety violations is important for their integration in safety-critical applications and engineering corrective safety measures for the system. Existing methods leverage simulation-based testing (or falsification) to find the failures of vision-based controllers, i.e., the visual inputs that lead to closed-loop safety violations. However, these techniques do not scale well to the scenarios involving high-dimensional and complex visual inputs, such as RGB images. In this work, we cast the problem of finding closed-loop vision failures as a Hamilton-Jacobi (HJ) reachability problem. Our approach blends simulation-based analysis with HJ reachability methods to compute an approximation of the backward reachable tube (BRT) of the system, i.e., the set of unsafe states for the system under vision-based controllers. Utilizing the BRT, we can tractably and systematically find the system states and corresponding visual inputs that lead to closed-loop failures. These visual inputs can be subsequently analyzed to find the input characteristics that might have caused the failure. Besides its scalability to high-dimensional visual inputs, an explicit computation of BRT allows the proposed approach to capture non-trivial system failures that are difficult to expose via random simulations. We demonstrate our framework on two case studies involving an RGB image-based neural network controller for (a) autonomous indoor navigation, and (b) autonomous aircraft taxiing.
4/11/2024

Adaptive Robust Controller for handling Unknown Uncertainty of Robotic Manipulators
Mohamed Abdelwahab, Giulio Giacomuzzo, Alberto Dalla Libera, Ruggero Carli
0
0
The ability to achieve precise and smooth trajectory tracking is crucial for ensuring the successful execution of various tasks involving robotic manipulators. State-of-the-art techniques require accurate mathematical models of the robot dynamics, and robustness to model uncertainties is achieved by relying on precise bounds on the model mismatch. In this paper, we propose a novel adaptive robust feedback linearization scheme able to compensate for model uncertainties without any a-priori knowledge on them, and we provide a theoretical proof of convergence under mild assumptions. We evaluate the method on a simulated RR robot. First, we consider a nominal model with known model mismatch, which allows us to compare our strategy with state-of-the-art uncertainty-aware methods. Second, we implement the proposed control law in combination with a learned model, for which uncertainty bounds are not available. Results show that our method leads to performance comparable to uncertainty-aware methods while requiring less prior knowledge.
6/21/2024